 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBiPneu: Design and Control of a Bipolar-Pressure Pneumatic System for Soft Robots
May 12, 2026Positive-negative pressure regulation is critical to soft robotic actuators, enabling large motion ranges and versatile actuation modes. However, achieving high-performance regulation across both pressure polarities remains challenging due to asymmetric inflation-deflation dynamics, valve nonlinearities, and switching-induced flow disturbances. This paper presents BiPneu, a scalable and cost-efficient multi-channel bipolar-pressure pneumatic system for soft robots that enables wide-range, accurate, and responsive pressure regulation while providing seamless compatibility with high-level software ecosystems. A dual-mode sliding-mode controller (DM-SMC) with hysteresis-supervised mode selection is proposed based on a hybrid electro-pneumatic model. Extensive simulation and experiments demonstrate the superior performance of DM-SMC in tracking step and sinusoidal pressure references compared with both advanced model predictive controllers and well-tuned PID controllers. Experimental results show average absolute errors of 1.44 kPa in multi-step tests and 4.23 kPa in sinusoidal tracking, corresponding to reductions of 11.9% and 35.6% relative to PID control, along with improved control effort, valve switching rate, and transient response. Robustness of DM-SMC is further verified on a bellow actuator with pressure-dependent volume. Finally, BiPneu's capability is demonstrated via two soft robotic examples, quick ball-maneuvering with a soft parallel manipulator and real-time finite element method (FEM)-based teleoperation of a soft bellows actuator.
Polynomial-based Online Planning for Autonomous Drone Racing in Dynamic Environments
Jun 26, 2023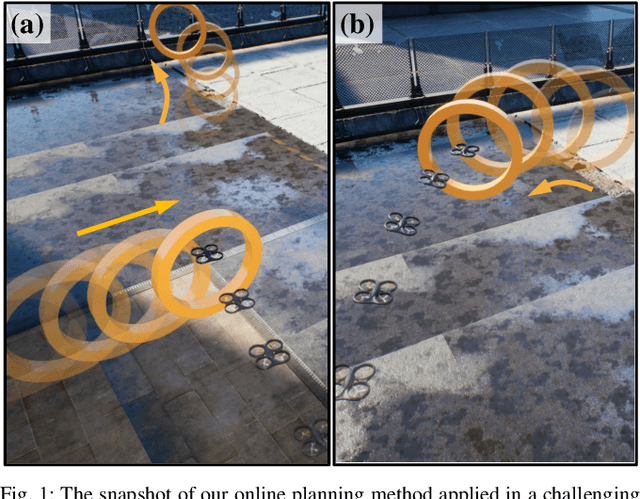
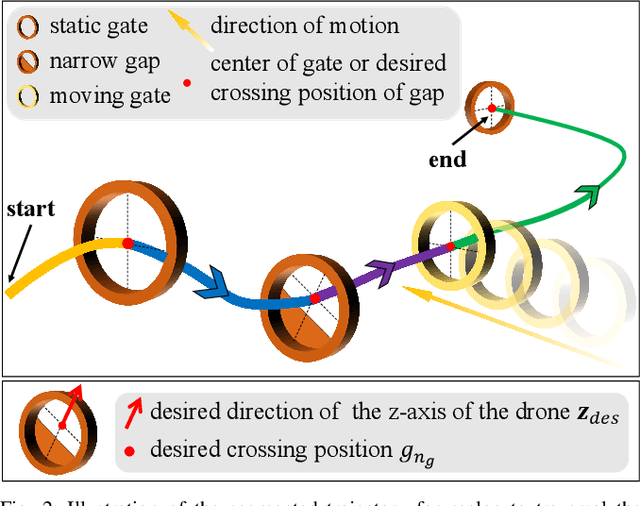
In recent years, there is a noteworthy advancement in autonomous drone racing. However, the primary focus is on attaining execution times, while scant attention is given to the challenges of dynamic environments. The high-speed nature of racing scenarios, coupled with the potential for unforeseeable environmental alterations, present stringent requirements for online replanning and its timeliness. For racing in dynamic environments, we propose an online replanning framework with an efficient polynomial trajectory representation. We trade off between aggressive speed and flexible obstacle avoidance based on an optimization approach. Additionally, to ensure safety and precision when crossing intermediate racing waypoints, we formulate the demand as hard constraints during planning. For dynamic obstacles, parallel multi-topology trajectory planning is designed based on engineering considerations to prevent racing time loss due to local optimums. The framework is integrated into a quadrotor system and successfully demonstrated at the DJI Robomaster Intelligent UAV Championship, where it successfully complete the racing track and placed first, finishing in less than half the time of the second-place.
Continuous Implicit SDF Based Any-shape Robot Trajectory Optimization
Mar 02, 2023



Optimization-based trajectory generation methods are widely used in whole-body planning for robots. However, existing work either oversimplifies the robot's geometry and environment representation, resulting in a conservative trajectory, or suffers from a huge overhead in maintaining additional information such as the Signed Distance Field (SDF). To bridge the gap, we consider the robot as an implicit function, with its surface boundary represented by the zero-level set of its SDF. Based on this, we further employ another implicit function to lazily compute the signed distance to the swept volume generated by the robot and its trajectory. The computation is efficient by exploiting continuity in space-time, and the implicit function guarantees precise and continuous collision evaluation even for nonconvex robots with complex surfaces. Furthermore, we propose a trajectory optimization pipeline applicable to the implicit SDF. Simulation and real-world experiments validate the high performance of our approach for arbitrarily shaped robot trajectory optimization.