 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenerating Images with Multimodal Language Models
May 26, 2023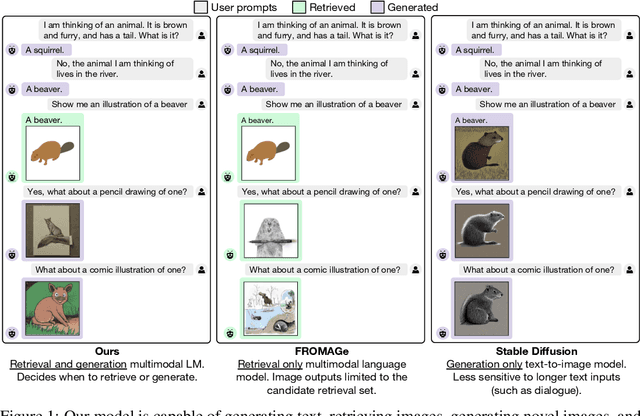

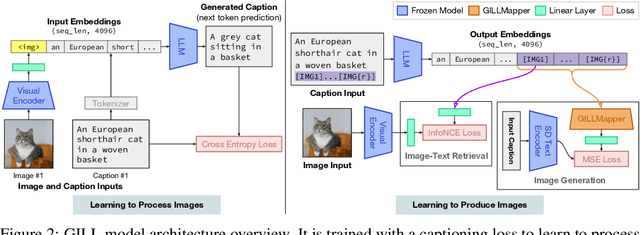

We propose a method to fuse frozen text-only large language models (LLMs) with pre-trained image encoder and decoder models, by mapping between their embedding spaces. Our model demonstrates a wide suite of multimodal capabilities: image retrieval, novel image generation, and multimodal dialogue. Ours is the first approach capable of conditioning on arbitrarily interleaved image and text inputs to generate coherent image (and text) outputs. To achieve strong performance on image generation, we propose an efficient mapping network to ground the LLM to an off-the-shelf text-to-image generation model. This mapping network translates hidden representations of text into the embedding space of the visual models, enabling us to leverage the strong text representations of the LLM for visual outputs. Our approach outperforms baseline generation models on tasks with longer and more complex language. In addition to novel image generation, our model is also capable of image retrieval from a prespecified dataset, and decides whether to retrieve or generate at inference time. This is done with a learnt decision module which conditions on the hidden representations of the LLM. Our model exhibits a wider range of capabilities compared to prior multimodal language models. It can process image-and-text inputs, and produce retrieved images, generated images, and generated text -- outperforming non-LLM based generation models across several text-to-image tasks that measure context dependence.
VQ3D: Learning a 3D-Aware Generative Model on ImageNet
Feb 14, 2023



Recent work has shown the possibility of training generative models of 3D content from 2D image collections on small datasets corresponding to a single object class, such as human faces, animal faces, or cars. However, these models struggle on larger, more complex datasets. To model diverse and unconstrained image collections such as ImageNet, we present VQ3D, which introduces a NeRF-based decoder into a two-stage vector-quantized autoencoder. Our Stage 1 allows for the reconstruction of an input image and the ability to change the camera position around the image, and our Stage 2 allows for the generation of new 3D scenes. VQ3D is capable of generating and reconstructing 3D-aware images from the 1000-class ImageNet dataset of 1.2 million training images. We achieve an ImageNet generation FID score of 16.8, compared to 69.8 for the next best baseline method.
Grounding Language Models to Images for Multimodal Generation
Jan 31, 2023



We propose an efficient method to ground pretrained text-only language models to the visual domain, enabling them to process and generate arbitrarily interleaved image-and-text data. Our method leverages the abilities of language models learnt from large scale text-only pretraining, such as in-context learning and free-form text generation. We keep the language model frozen, and finetune input and output linear layers to enable cross-modality interactions. This allows our model to process arbitrarily interleaved image-and-text inputs, and generate free-form text interleaved with retrieved images. We achieve strong zero-shot performance on grounded tasks such as contextual image retrieval and multimodal dialogue, and showcase compelling interactive abilities. Our approach works with any off-the-shelf language model and paves the way towards an effective, general solution for leveraging pretrained language models in visually grounded settings.
A New Path: Scaling Vision-and-Language Navigation with Synthetic Instructions and Imitation Learning
Oct 06, 2022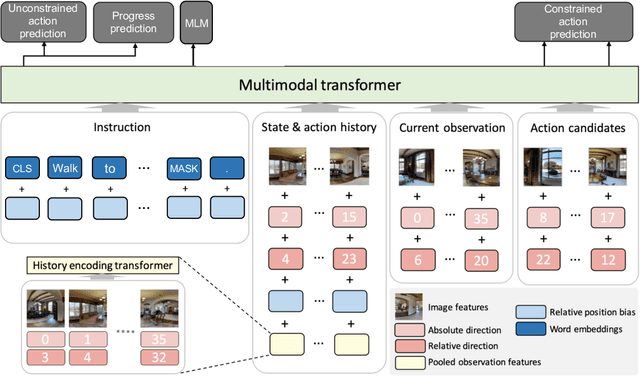
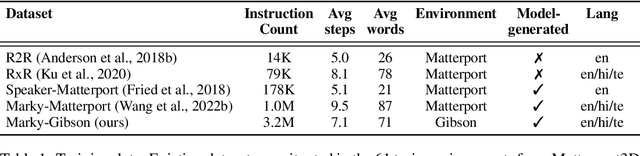
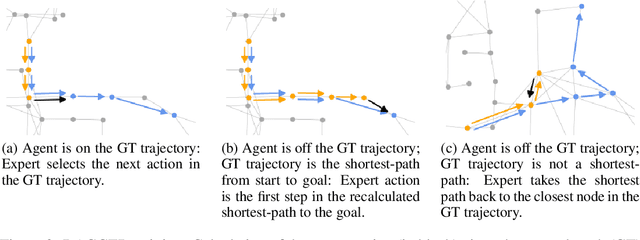

Recent studies in Vision-and-Language Navigation (VLN) train RL agents to execute natural-language navigation instructions in photorealistic environments, as a step towards intelligent agents or robots that can follow human instructions. However, given the scarcity of human instruction data and limited diversity in the training environments, these agents still struggle with complex language grounding and spatial language understanding. Pre-training on large text and image-text datasets from the web has been extensively explored but the improvements are limited. To address the scarcity of in-domain instruction data, we investigate large-scale augmentation with synthetic instructions. We take 500+ indoor environments captured in densely-sampled 360 deg panoramas, construct navigation trajectories through these panoramas, and generate a visually-grounded instruction for each trajectory using Marky (Wang et al., 2022), a high-quality multilingual navigation instruction generator. To further increase the variability of the trajectories, we also synthesize image observations from novel viewpoints using an image-to-image GAN. The resulting dataset of 4.2M instruction-trajectory pairs is two orders of magnitude larger than existing human-annotated datasets, and contains a wider variety of environments and viewpoints. To efficiently leverage data at this scale, we train a transformer agent with imitation learning for over 700M steps of experience. On the challenging Room-across-Room dataset, our approach outperforms all existing RL agents, improving the state-of-the-art NDTW from 71.1 to 79.1 in seen environments, and from 64.6 to 66.8 in unseen test environments. Our work points to a new path to improving instruction-following agents, emphasizing large-scale imitation learning and the development of synthetic instruction generation capabilities.
Scaling Autoregressive Models for Content-Rich Text-to-Image Generation
Jun 22, 2022
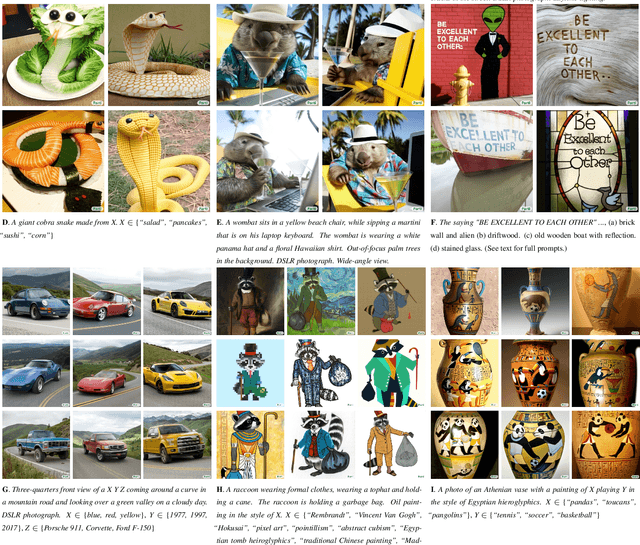
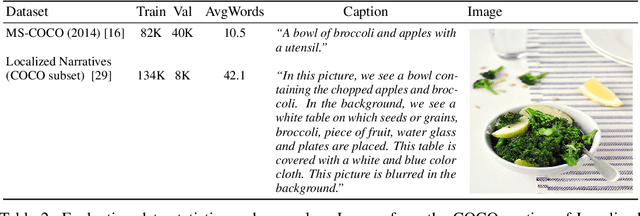
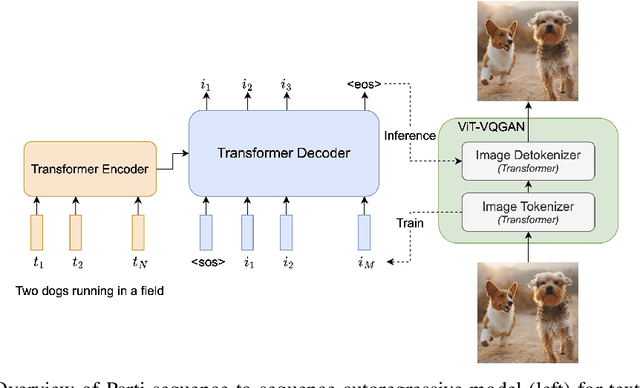
We present the Pathways Autoregressive Text-to-Image (Parti) model, which generates high-fidelity photorealistic images and supports content-rich synthesis involving complex compositions and world knowledge. Parti treats text-to-image generation as a sequence-to-sequence modeling problem, akin to machine translation, with sequences of image tokens as the target outputs rather than text tokens in another language. This strategy can naturally tap into the rich body of prior work on large language models, which have seen continued advances in capabilities and performance through scaling data and model sizes. Our approach is simple: First, Parti uses a Transformer-based image tokenizer, ViT-VQGAN, to encode images as sequences of discrete tokens. Second, we achieve consistent quality improvements by scaling the encoder-decoder Transformer model up to 20B parameters, with a new state-of-the-art zero-shot FID score of 7.23 and finetuned FID score of 3.22 on MS-COCO. Our detailed analysis on Localized Narratives as well as PartiPrompts (P2), a new holistic benchmark of over 1600 English prompts, demonstrate the effectiveness of Parti across a wide variety of categories and difficulty aspects. We also explore and highlight limitations of our models in order to define and exemplify key areas of focus for further improvements. See https://parti.research.google/ for high-resolution images.
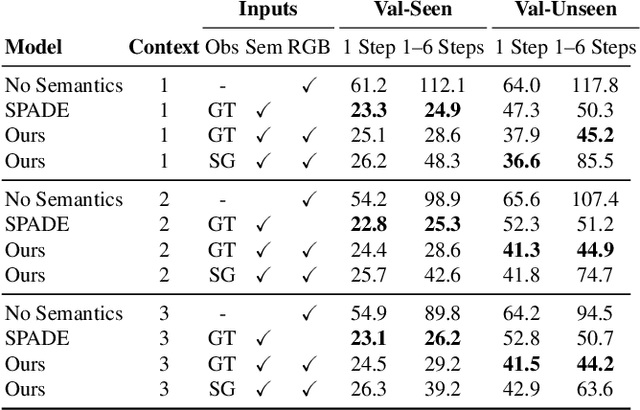
Simple and Effective Synthesis of Indoor 3D Scenes
Apr 06, 2022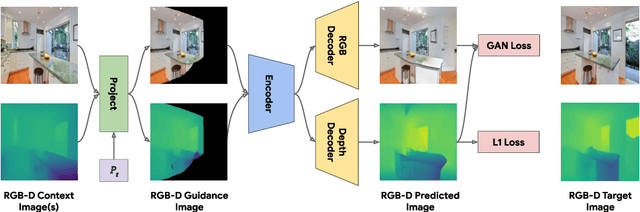
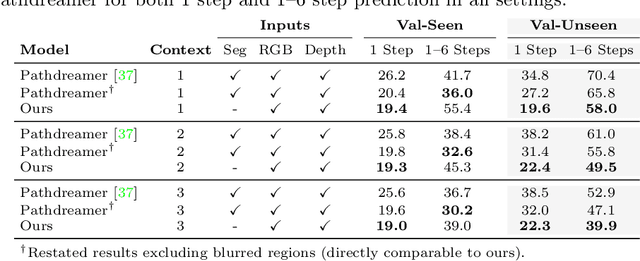

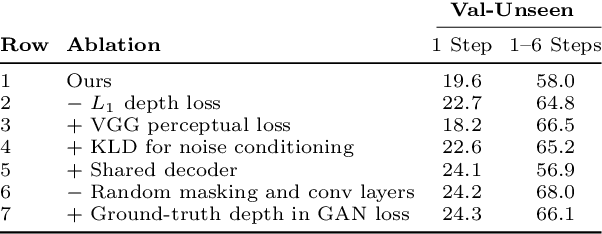
We study the problem of synthesizing immersive 3D indoor scenes from one or more images. Our aim is to generate high-resolution images and videos from novel viewpoints, including viewpoints that extrapolate far beyond the input images while maintaining 3D consistency. Existing approaches are highly complex, with many separately trained stages and components. We propose a simple alternative: an image-to-image GAN that maps directly from reprojections of incomplete point clouds to full high-resolution RGB-D images. On the Matterport3D and RealEstate10K datasets, our approach significantly outperforms prior work when evaluated by humans, as well as on FID scores. Further, we show that our model is useful for generative data augmentation. A vision-and-language navigation (VLN) agent trained with trajectories spatially-perturbed by our model improves success rate by up to 1.5% over a state of the art baseline on the R2R benchmark. Our code will be made available to facilitate generative data augmentation and applications to downstream robotics and embodied AI tasks.
Vector-quantized Image Modeling with Improved VQGAN
Oct 09, 2021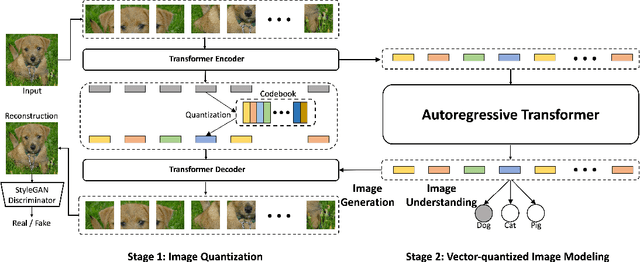
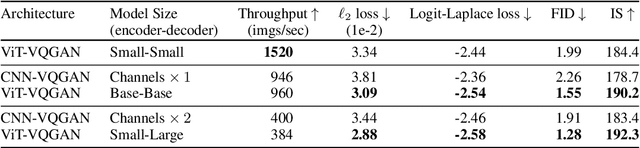

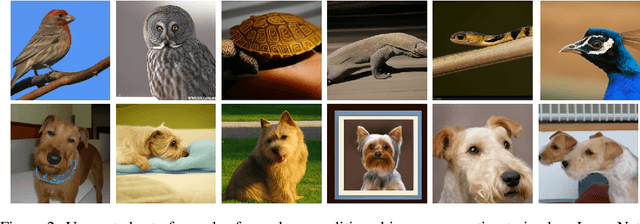
Pretraining language models with next-token prediction on massive text corpora has delivered phenomenal zero-shot, few-shot, transfer learning and multi-tasking capabilities on both generative and discriminative language tasks. Motivated by this success, we explore a Vector-quantized Image Modeling (VIM) approach that involves pretraining a Transformer to predict rasterized image tokens autoregressively. The discrete image tokens are encoded from a learned Vision-Transformer-based VQGAN (ViT-VQGAN). We first propose multiple improvements over vanilla VQGAN from architecture to codebook learning, yielding better efficiency and reconstruction fidelity. The improved ViT-VQGAN further improves vector-quantized image modeling tasks, including unconditional, class-conditioned image generation and unsupervised representation learning. When trained on ImageNet at 256x256 resolution, we achieve Inception Score (IS) of 175.1 and Fr'echet Inception Distance (FID) of 4.17, a dramatic improvement over the vanilla VQGAN, which obtains 70.6 and 17.04 for IS and FID, respectively. Based on ViT-VQGAN and unsupervised pretraining, we further evaluate the pretrained Transformer by averaging intermediate features, similar to Image GPT (iGPT). This ImageNet-pretrained VIM-L significantly beats iGPT-L on linear-probe accuracy from 60.3% to 72.2% for a similar model size. ViM-L also outperforms iGPT-XL which is trained with extra web image data and larger model size.
Pathdreamer: A World Model for Indoor Navigation
May 18, 2021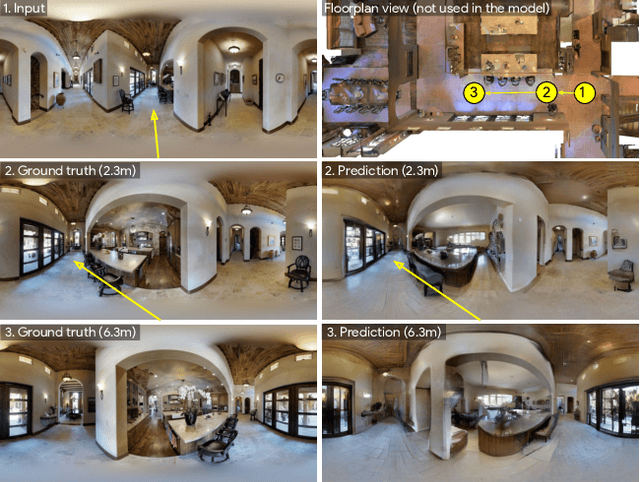
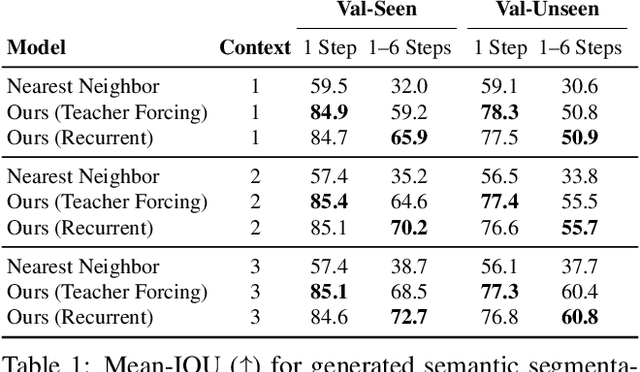
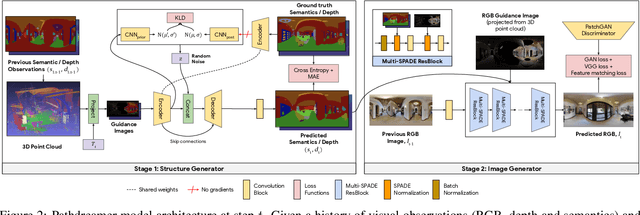
People navigating in unfamiliar buildings take advantage of myriad visual, spatial and semantic cues to efficiently achieve their navigation goals. Towards equipping computational agents with similar capabilities, we introduce Pathdreamer, a visual world model for agents navigating in novel indoor environments. Given one or more previous visual observations, Pathdreamer generates plausible high-resolution 360 visual observations (RGB, semantic segmentation and depth) for viewpoints that have not been visited, in buildings not seen during training. In regions of high uncertainty (e.g. predicting around corners, imagining the contents of an unseen room), Pathdreamer can predict diverse scenes, allowing an agent to sample multiple realistic outcomes for a given trajectory. We demonstrate that Pathdreamer encodes useful and accessible visual, spatial and semantic knowledge about human environments by using it in the downstream task of Vision-and-Language Navigation (VLN). Specifically, we show that planning ahead with Pathdreamer brings about half the benefit of looking ahead at actual observations from unobserved parts of the environment. We hope that Pathdreamer will help unlock model-based approaches to challenging embodied navigation tasks such as navigating to specified objects and VLN.
Revisiting Hierarchical Approach for Persistent Long-Term Video Prediction
Apr 14, 2021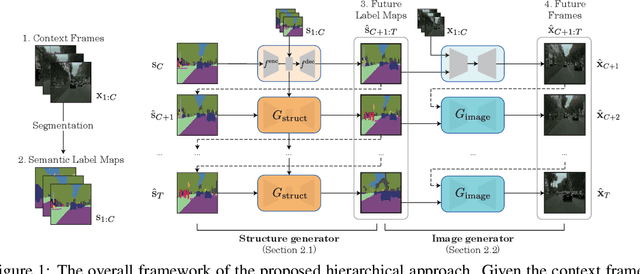
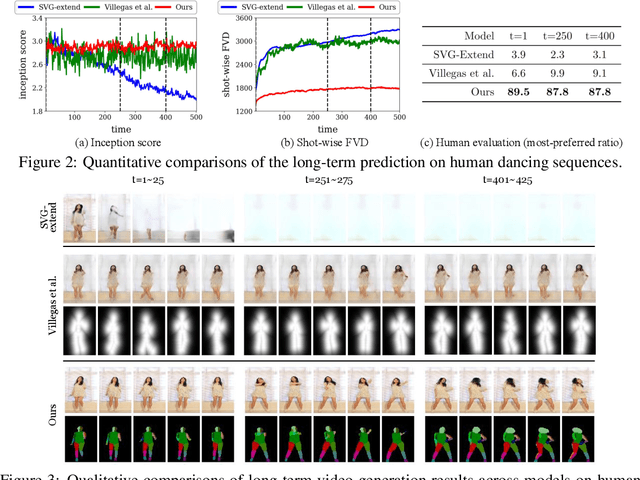
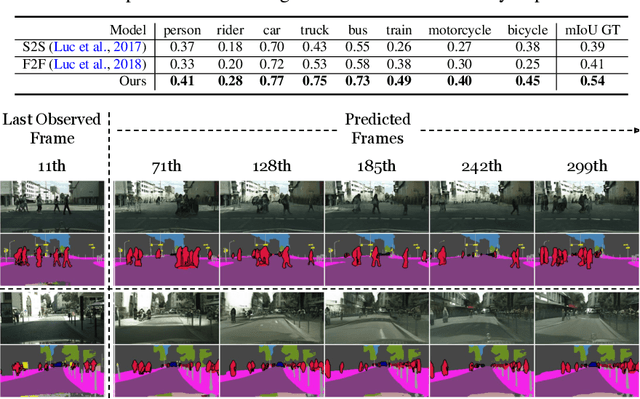
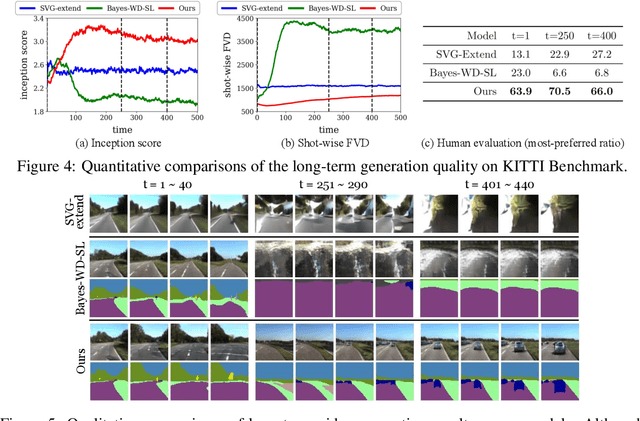
Learning to predict the long-term future of video frames is notoriously challenging due to inherent ambiguities in the distant future and dramatic amplifications of prediction error through time. Despite the recent advances in the literature, existing approaches are limited to moderately short-term prediction (less than a few seconds), while extrapolating it to a longer future quickly leads to destruction in structure and content. In this work, we revisit hierarchical models in video prediction. Our method predicts future frames by first estimating a sequence of semantic structures and subsequently translating the structures to pixels by video-to-video translation. Despite the simplicity, we show that modeling structures and their dynamics in the discrete semantic structure space with a stochastic recurrent estimator leads to surprisingly successful long-term prediction. We evaluate our method on three challenging datasets involving car driving and human dancing, and demonstrate that it can generate complicated scene structures and motions over a very long time horizon (i.e., thousands frames), setting a new standard of video prediction with orders of magnitude longer prediction time than existing approaches. Full videos and codes are available at https://1konny.github.io/HVP/.
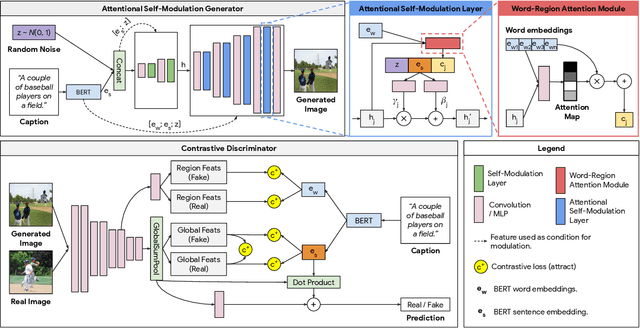
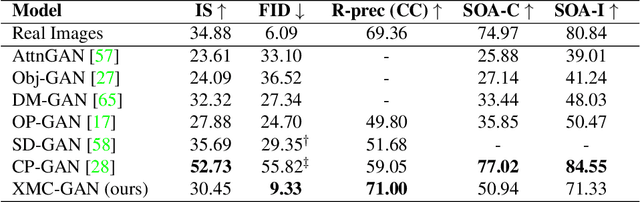
Cross-Modal Contrastive Learning for Text-to-Image Generation
Jan 15, 2021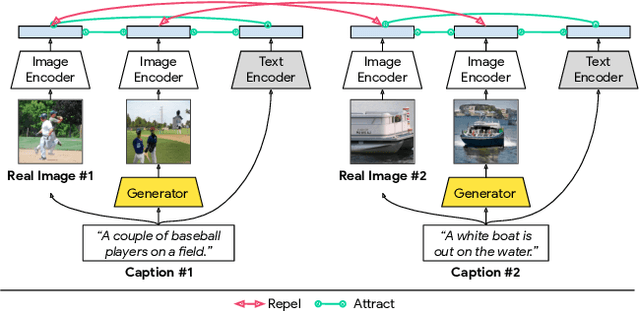
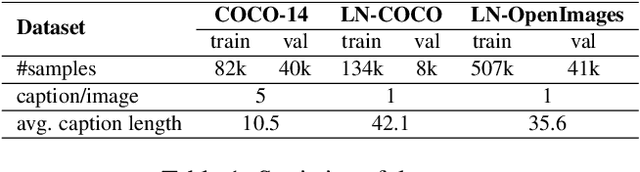
The output of text-to-image synthesis systems should be coherent, clear, photo-realistic scenes with high semantic fidelity to their conditioned text descriptions. Our Cross-Modal Contrastive Generative Adversarial Network (XMC-GAN) addresses this challenge by maximizing the mutual information between image and text. It does this via multiple contrastive losses which capture inter-modality and intra-modality correspondences. XMC-GAN uses an attentional self-modulation generator, which enforces strong text-image correspondence, and a contrastive discriminator, which acts as a critic as well as a feature encoder for contrastive learning. The quality of XMC-GAN's output is a major step up from previous models, as we show on three challenging datasets. On MS-COCO, not only does XMC-GAN improve state-of-the-art FID from 24.70 to 9.33, but--more importantly--people prefer XMC-GAN by 77.3 for image quality and 74.1 for image-text alignment, compared to three other recent models. XMC-GAN also generalizes to the challenging Localized Narratives dataset (which has longer, more detailed descriptions), improving state-of-the-art FID from 48.70 to 14.12. Lastly, we train and evaluate XMC-GAN on the challenging Open Images data, establishing a strong benchmark FID score of 26.91.