 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Deepfake Detection, NTIRE 2026 Challenge: Report
Apr 27, 2026Robustness is a long-overlooked problem in deepfake detection. However, detection performance is nearly worthless in the real world if it suffers under exposure to even slight image degradation. In addition to weaker degradations that can accidentally occur in the image processing pipeline, there is another risk of malicious deepfakes that specifically introduce degradations, purposefully exploiting the detector's weaknesses in that regard. Here, we present an overview of the NTIRE 2026 Robust Deepfake Detection Challenge, which specifically addresses that problem. Participants were tasked with building a detector that would later be tested on an unknown test-set, which included both common and uncommon degradations of various strengths. With a total number of 337 participants and 57 submissions to the final leaderboard, the first edition of the challenge was well received. To ensure the reliability of the results, participants were given only 24h to complete the test run with no labels provided, limiting the possibility of training on the test data. Furthermore, the top solutions were scored on a private test-set to detect any such overfitting. This report presents the competition setting, dataset preparation, as well as details and performance of methods. Top methods rely on large foundation models, ensembles, and degradation training to combine generality and robustness.
Low Light Image Enhancement Challenge at NTIRE 2026
Apr 19, 2026This paper presents a comprehensive review of the NTIRE 2026 Low Light Image Enhancement Challenge, highlighting the proposed solutions and final results. The objective of this challenge is to identify effective networks capable of producing clearer and visually compelling images in diverse and challenging conditions by learning representative visual cues with the purpose of restoring information loss due to low-contrast and noisy images. A total of 195 participants registered for the first track and 153 for the second track of the competition, and 22 teams ultimately submitted valid entries. This paper thoroughly evaluates the state-of-the-art advances in (joint denoising and) low-light image enhancement, showcasing the significant progress in the field, while leveraging samples of our novel dataset.
The Fourth Challenge on Image Super-Resolution ($\times$4) at NTIRE 2026: Benchmark Results and Method Overview
Apr 16, 2026This paper presents the NTIRE 2026 image super-resolution ($\times$4) challenge, one of the associated competitions of the NTIRE 2026 Workshop at CVPR 2026. The challenge aims to reconstruct high-resolution (HR) images from low-resolution (LR) inputs generated through bicubic downsampling with a $\times$4 scaling factor. The objective is to develop effective super-resolution solutions and analyze recent advances in the field. To reflect the evolving objectives of image super-resolution, the challenge includes two tracks: (1) a restoration track, which emphasizes pixel-wise fidelity and ranks submissions based on PSNR; and (2) a perceptual track, which focuses on visual realism and evaluates results using a perceptual score. A total of 194 participants registered for the challenge, with 31 teams submitting valid entries. This report summarizes the challenge design, datasets, evaluation protocol, main results, and methods of participating teams. The challenge provides a unified benchmark and offers insights into current progress and future directions in image super-resolution.
NTIRE 2026 Challenge on Robust AI-Generated Image Detection in the Wild
Apr 13, 2026This paper presents an overview of the NTIRE 2026 Challenge on Robust AI-Generated Image Detection in the Wild, held in conjunction with the NTIRE workshop at CVPR 2026. The goal of this challenge was to develop detection models capable of distinguishing real images from generated ones in realistic scenarios: the images are often transformed (cropped, resized, compressed, blurred) for practical usage, and therefore, the detection models should be robust to such transformations. The challenge is based on a novel dataset consisting of 108,750 real and 185,750 AI-generated images from 42 generators comprising a large variety of open-source and closed-source models of various architectures, augmented with 36 image transformations. Methods were evaluated using ROC AUC on the full test set, including both transformed and untransformed images. A total of 511 participants registered, with 20 teams submitting valid final solutions. This report provides a comprehensive overview of the challenge, describes the proposed solutions, and can be used as a valuable reference for researchers and practitioners in increasing the robustness of the detection models to real-world transformations.
Lost in Translation? A Comparative Study on the Cross-Lingual Transfer of Composite Harms
Feb 08, 2026Most safety evaluations of large language models (LLMs) remain anchored in English. Translation is often used as a shortcut to probe multilingual behavior, but it rarely captures the full picture, especially when harmful intent or structure morphs across languages. Some types of harm survive translation almost intact, while others distort or disappear. To study this effect, we introduce CompositeHarm, a translation-based benchmark designed to examine how safety alignment holds up as both syntax and semantics shift. It combines two complementary English datasets, AttaQ, which targets structured adversarial attacks, and MMSafetyBench, which covers contextual, real-world harms, and extends them into six languages: English, Hindi, Assamese, Marathi, Kannada, and Gujarati. Using three large models, we find that attack success rates rise sharply in Indic languages, especially under adversarial syntax, while contextual harms transfer more moderately. To ensure scalability and energy efficiency, our study adopts lightweight inference strategies inspired by edge-AI design principles, reducing redundant evaluation passes while preserving cross-lingual fidelity. This design makes large-scale multilingual safety testing both computationally feasible and environmentally conscious. Overall, our results show that translated benchmarks are a necessary first step, but not a sufficient one, toward building grounded, resource-aware, language-adaptive safety systems.
Pay for Hints, Not Answers: LLM Shepherding for Cost-Efficient Inference
Jan 29, 2026Large Language Models (LLMs) deliver state-of-the-art performance on complex reasoning tasks, but their inference costs limit deployment at scale. Small Language Models (SLMs) offer dramatic cost savings yet lag substantially in accuracy. Existing approaches - routing and cascading - treat the LLM as an all-or-nothing resource: either the query bypasses the LLM entirely, or the LLM generates a complete response at full cost. We introduce LLM Shepherding, a framework that requests only a short prefix (a hint) from the LLM and provides it to SLM. This simple mechanism is surprisingly effective for math and coding tasks: even hints comprising 10-30% of the full LLM response improve SLM accuracy significantly. Shepherding generalizes both routing and cascading, and it achieves lower cost under oracle decision-making. We develop a two-stage predictor that jointly determines whether a hint is needed and how many tokens to request. On the widely-used mathematical reasoning (GSM8K, CNK12) and code generation (HumanEval, MBPP) benchmarks, Shepherding reduces costs by 42-94% relative to LLM-only inference. Compared to state-of-the-art routing and cascading baselines, shepherding delivers up to 2.8x cost reduction while matching accuracy. To our knowledge, this is the first work to exploit token-level budget control for SLM-LLM collaboration.
Neo: Real-Time On-Device 3D Gaussian Splatting with Reuse-and-Update Sorting Acceleration
Nov 17, 2025



3D Gaussian Splatting (3DGS) rendering in real-time on resource-constrained devices is essential for delivering immersive augmented and virtual reality (AR/VR) experiences. However, existing solutions struggle to achieve high frame rates, especially for high-resolution rendering. Our analysis identifies the sorting stage in the 3DGS rendering pipeline as the major bottleneck due to its high memory bandwidth demand. This paper presents Neo, which introduces a reuse-and-update sorting algorithm that exploits temporal redundancy in Gaussian ordering across consecutive frames, and devises a hardware accelerator optimized for this algorithm. By efficiently tracking and updating Gaussian depth ordering instead of re-sorting from scratch, Neo significantly reduces redundant computations and memory bandwidth pressure. Experimental results show that Neo achieves up to 10.0x and 5.6x higher throughput than state-of-the-art edge GPU and ASIC solution, respectively, while reducing DRAM traffic by 94.5% and 81.3%. These improvements make high-quality and low-latency on-device 3D rendering more practical.
DaCapo: Accelerating Continuous Learning in Autonomous Systems for Video Analytics
Mar 21, 2024Deep neural network (DNN) video analytics is crucial for autonomous systems such as self-driving vehicles, unmanned aerial vehicles (UAVs), and security robots. However, real-world deployment faces challenges due to their limited computational resources and battery power. To tackle these challenges, continuous learning exploits a lightweight "student" model at deployment (inference), leverages a larger "teacher" model for labeling sampled data (labeling), and continuously retrains the student model to adapt to changing scenarios (retraining). This paper highlights the limitations in state-of-the-art continuous learning systems: (1) they focus on computations for retraining, while overlooking the compute needs for inference and labeling, (2) they rely on power-hungry GPUs, unsuitable for battery-operated autonomous systems, and (3) they are located on a remote centralized server, intended for multi-tenant scenarios, again unsuitable for autonomous systems due to privacy, network availability, and latency concerns. We propose a hardware-algorithm co-designed solution for continuous learning, DaCapo, that enables autonomous systems to perform concurrent executions of inference, labeling, and training in a performant and energy-efficient manner. DaCapo comprises (1) a spatially-partitionable and precision-flexible accelerator enabling parallel execution of kernels on sub-accelerators at their respective precisions, and (2) a spatiotemporal resource allocation algorithm that strategically navigates the resource-accuracy tradeoff space, facilitating optimal decisions for resource allocation to achieve maximal accuracy. Our evaluation shows that DaCapo achieves 6.5% and 5.5% higher accuracy than a state-of-the-art GPU-based continuous learning systems, Ekya and EOMU, respectively, while consuming 254x less power.
CoVA: Exploiting Compressed-Domain Analysis to Accelerate Video Analytics
Jul 02, 2022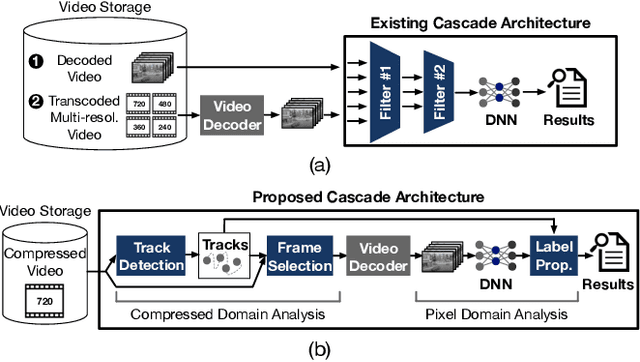

Modern retrospective analytics systems leverage cascade architecture to mitigate bottleneck for computing deep neural networks (DNNs). However, the existing cascades suffer two limitations: (1) decoding bottleneck is either neglected or circumvented, paying significant compute and storage cost for pre-processing; and (2) the systems are specialized for temporal queries and lack spatial query support. This paper presents CoVA, a novel cascade architecture that splits the cascade computation between compressed domain and pixel domain to address the decoding bottleneck, supporting both temporal and spatial queries. CoVA cascades analysis into three major stages where the first two stages are performed in compressed domain while the last one in pixel domain. First, CoVA detects occurrences of moving objects (called blobs) over a set of compressed frames (called tracks). Then, using the track results, CoVA prudently selects a minimal set of frames to obtain the label information and only decode them to compute the full DNNs, alleviating the decoding bottleneck. Lastly, CoVA associates tracks with labels to produce the final analysis results on which users can process both temporal and spatial queries. Our experiments demonstrate that CoVA offers 4.8x throughput improvement over modern cascade systems, while imposing modest accuracy loss.
Bit-Parallel Vector Composability for Neural Acceleration
Apr 11, 2020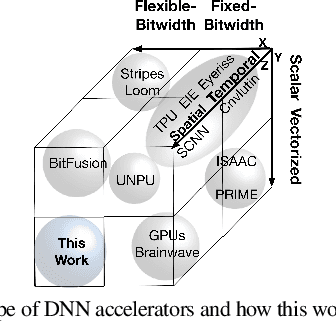
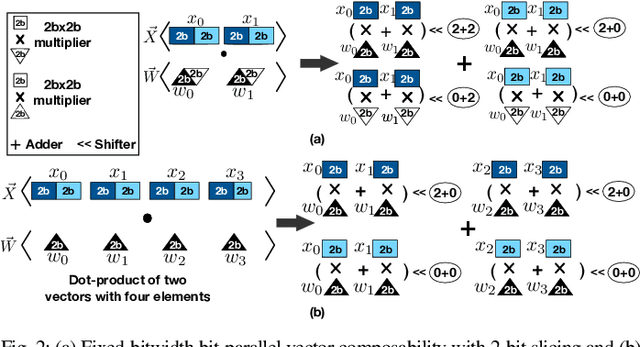
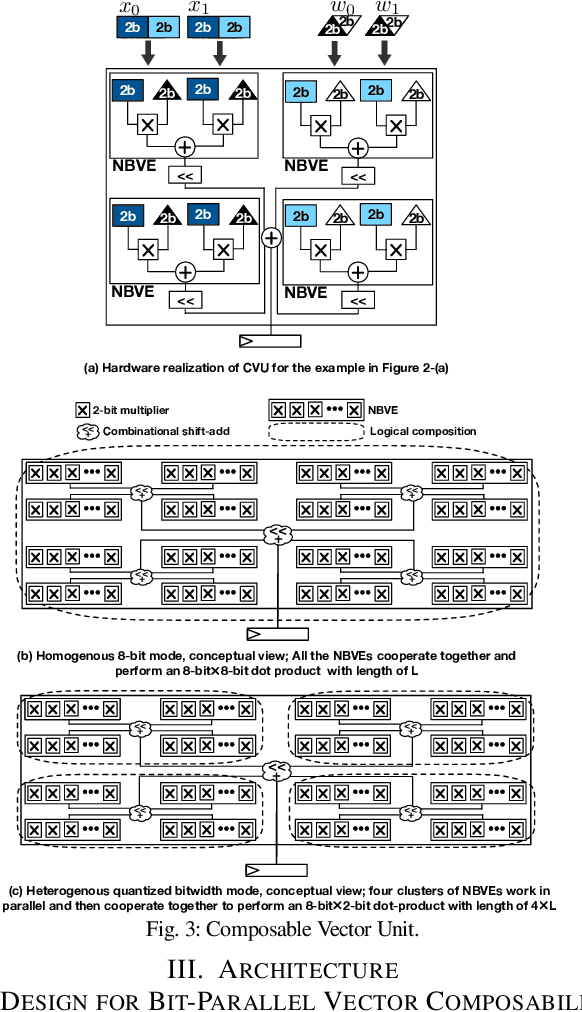
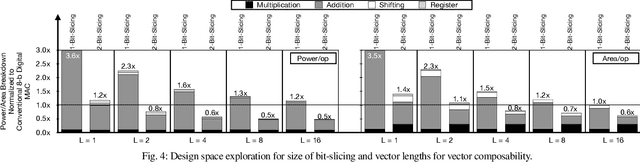
Conventional neural accelerators rely on isolated self-sufficient functional units that perform an atomic operation while communicating the results through an operand delivery-aggregation logic. Each single unit processes all the bits of their operands atomically and produce all the bits of the results in isolation. This paper explores a different design style, where each unit is only responsible for a slice of the bit-level operations to interleave and combine the benefits of bit-level parallelism with the abundant data-level parallelism in deep neural networks. A dynamic collection of these units cooperate at runtime to generate bits of the results, collectively. Such cooperation requires extracting new grouping between the bits, which is only possible if the operands and operations are vectorizable. The abundance of Data Level Parallelism and mostly repeated execution patterns, provides a unique opportunity to define and leverage this new dimension of Bit-Parallel Vector Composability. This design intersperses bit parallelism within data-level parallelism and dynamically interweaves the two together. As such, the building block of our neural accelerator is a Composable Vector Unit that is a collection of Narrower-Bitwidth Vector Engines, which are dynamically composed or decomposed at the bit granularity. Using six diverse CNN and LSTM deep networks, we evaluate this design style across four design points: with and without algorithmic bitwidth heterogeneity and with and without availability of a high-bandwidth off-chip memory. Across these four design points, Bit-Parallel Vector Composability brings (1.4x to 3.5x) speedup and (1.1x to 2.7x) energy reduction. We also comprehensively compare our design style to the Nvidia RTX 2080 TI GPU, which also supports INT-4 execution. The benefits range between 28.0x and 33.7x improvement in Performance-per-Watt.