 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNCT-CRC-HE: Not All Histopathological Datasets Are Equally Useful
Sep 17, 2024



Numerous deep learning-based solutions have been proposed for histopathological image analysis over the past years. While they usually demonstrate exceptionally high accuracy, one key question is whether their precision might be affected by low-level image properties not related to histopathology but caused by microscopy image handling and pre-processing. In this paper, we analyze a popular NCT-CRC-HE-100K colorectal cancer dataset used in numerous prior works and show that both this dataset and the obtained results may be affected by data-specific biases. The most prominent revealed dataset issues are inappropriate color normalization, severe JPEG artifacts inconsistent between different classes, and completely corrupted tissue samples resulting from incorrect image dynamic range handling. We show that even the simplest model using only 3 features per image (red, green and blue color intensities) can demonstrate over 50% accuracy on this 9-class dataset, while using color histogram not explicitly capturing cell morphology features yields over 82% accuracy. Moreover, we show that a basic EfficientNet-B0 ImageNet pretrained model can achieve over 97.7% accuracy on this dataset, outperforming all previously proposed solutions developed for this task, including dedicated foundation histopathological models and large cell morphology-aware neural networks. The NCT-CRC-HE dataset is publicly available and can be freely used to replicate the presented results. The codes and pre-trained models used in this paper are available at https://github.com/gmalivenko/NCT-CRC-HE-experiments
PyNet-V2 Mobile: Efficient On-Device Photo Processing With Neural Networks
Nov 08, 2022The increased importance of mobile photography created a need for fast and performant RAW image processing pipelines capable of producing good visual results in spite of the mobile camera sensor limitations. While deep learning-based approaches can efficiently solve this problem, their computational requirements usually remain too large for high-resolution on-device image processing. To address this limitation, we propose a novel PyNET-V2 Mobile CNN architecture designed specifically for edge devices, being able to process RAW 12MP photos directly on mobile phones under 1.5 second and producing high perceptual photo quality. To train and to evaluate the performance of the proposed solution, we use the real-world Fujifilm UltraISP dataset consisting on thousands of RAW-RGB image pairs captured with a professional medium-format 102MP Fujifilm camera and a popular Sony mobile camera sensor. The results demonstrate that the PyNET-V2 Mobile model can substantially surpass the quality of tradition ISP pipelines, while outperforming the previously introduced neural network-based solutions designed for fast image processing. Furthermore, we show that the proposed architecture is also compatible with the latest mobile AI accelerators such as NPUs or APUs that can be used to further reduce the latency of the model to as little as 0.5 second. The dataset, code and pre-trained models used in this paper are available on the project website: https://github.com/gmalivenko/PyNET-v2
Efficient Single-Image Depth Estimation on Mobile Devices, Mobile AI & AIM 2022 Challenge: Report
Nov 07, 2022



Various depth estimation models are now widely used on many mobile and IoT devices for image segmentation, bokeh effect rendering, object tracking and many other mobile tasks. Thus, it is very crucial to have efficient and accurate depth estimation models that can run fast on low-power mobile chipsets. In this Mobile AI challenge, the target was to develop deep learning-based single image depth estimation solutions that can show a real-time performance on IoT platforms and smartphones. For this, the participants used a large-scale RGB-to-depth dataset that was collected with the ZED stereo camera capable to generated depth maps for objects located at up to 50 meters. The runtime of all models was evaluated on the Raspberry Pi 4 platform, where the developed solutions were able to generate VGA resolution depth maps at up to 27 FPS while achieving high fidelity results. All models developed in the challenge are also compatible with any Android or Linux-based mobile devices, their detailed description is provided in this paper.
Fast and Accurate Quantized Camera Scene Detection on Smartphones, Mobile AI 2021 Challenge: Report
May 17, 2021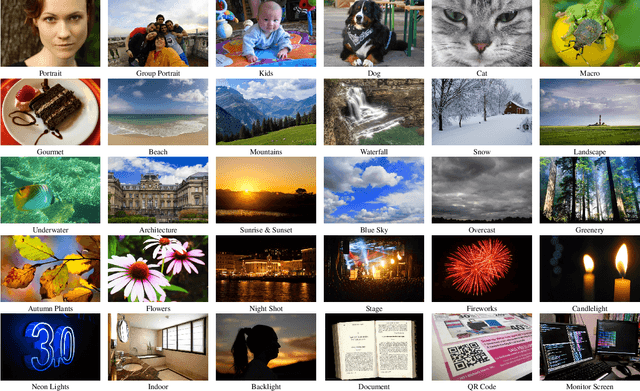
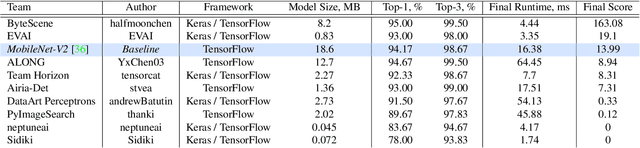

Camera scene detection is among the most popular computer vision problem on smartphones. While many custom solutions were developed for this task by phone vendors, none of the designed models were available publicly up until now. To address this problem, we introduce the first Mobile AI challenge, where the target is to develop quantized deep learning-based camera scene classification solutions that can demonstrate a real-time performance on smartphones and IoT platforms. For this, the participants were provided with a large-scale CamSDD dataset consisting of more than 11K images belonging to the 30 most important scene categories. The runtime of all models was evaluated on the popular Apple Bionic A11 platform that can be found in many iOS devices. The proposed solutions are fully compatible with all major mobile AI accelerators and can demonstrate more than 100-200 FPS on the majority of recent smartphone platforms while achieving a top-3 accuracy of more than 98%. A detailed description of all models developed in the challenge is provided in this paper.
Fast and Accurate Single-Image Depth Estimation on Mobile Devices, Mobile AI 2021 Challenge: Report
May 17, 2021


Depth estimation is an important computer vision problem with many practical applications to mobile devices. While many solutions have been proposed for this task, they are usually very computationally expensive and thus are not applicable for on-device inference. To address this problem, we introduce the first Mobile AI challenge, where the target is to develop an end-to-end deep learning-based depth estimation solutions that can demonstrate a nearly real-time performance on smartphones and IoT platforms. For this, the participants were provided with a new large-scale dataset containing RGB-depth image pairs obtained with a dedicated stereo ZED camera producing high-resolution depth maps for objects located at up to 50 meters. The runtime of all models was evaluated on the popular Raspberry Pi 4 platform with a mobile ARM-based Broadcom chipset. The proposed solutions can generate VGA resolution depth maps at up to 10 FPS on the Raspberry Pi 4 while achieving high fidelity results, and are compatible with any Android or Linux-based mobile devices. A detailed description of all models developed in the challenge is provided in this paper.
Learned Smartphone ISP on Mobile NPUs with Deep Learning, Mobile AI 2021 Challenge: Report
May 17, 2021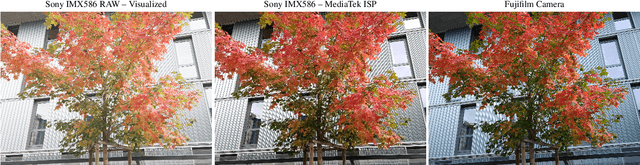
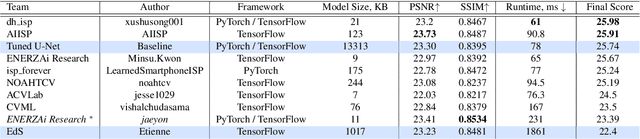
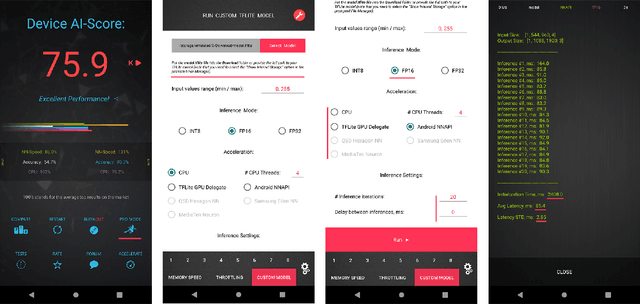
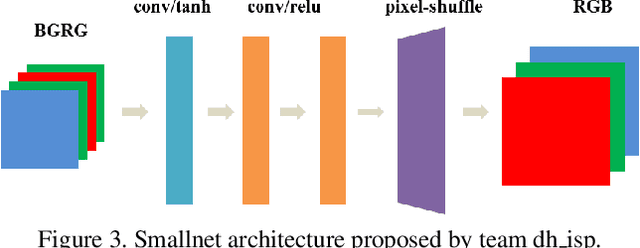
As the quality of mobile cameras starts to play a crucial role in modern smartphones, more and more attention is now being paid to ISP algorithms used to improve various perceptual aspects of mobile photos. In this Mobile AI challenge, the target was to develop an end-to-end deep learning-based image signal processing (ISP) pipeline that can replace classical hand-crafted ISPs and achieve nearly real-time performance on smartphone NPUs. For this, the participants were provided with a novel learned ISP dataset consisting of RAW-RGB image pairs captured with the Sony IMX586 Quad Bayer mobile sensor and a professional 102-megapixel medium format camera. The runtime of all models was evaluated on the MediaTek Dimensity 1000+ platform with a dedicated AI processing unit capable of accelerating both floating-point and quantized neural networks. The proposed solutions are fully compatible with the above NPU and are capable of processing Full HD photos under 60-100 milliseconds while achieving high fidelity results. A detailed description of all models developed in this challenge is provided in this paper.