 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExploring The Landscape of Distributional Robustness for Question Answering Models
Oct 22, 2022We conduct a large empirical evaluation to investigate the landscape of distributional robustness in question answering. Our investigation spans over 350 models and 16 question answering datasets, including a diverse set of architectures, model sizes, and adaptation methods (e.g., fine-tuning, adapter tuning, in-context learning, etc.). We find that, in many cases, model variations do not affect robustness and in-distribution performance alone determines out-of-distribution performance. Moreover, our findings indicate that i) zero-shot and in-context learning methods are more robust to distribution shifts than fully fine-tuned models; ii) few-shot prompt fine-tuned models exhibit better robustness than few-shot fine-tuned span prediction models; iii) parameter-efficient and robustness enhancing training methods provide no significant robustness improvements. In addition, we publicly release all evaluations to encourage researchers to further analyze robustness trends for question answering models.
Patching open-vocabulary models by interpolating weights
Aug 10, 2022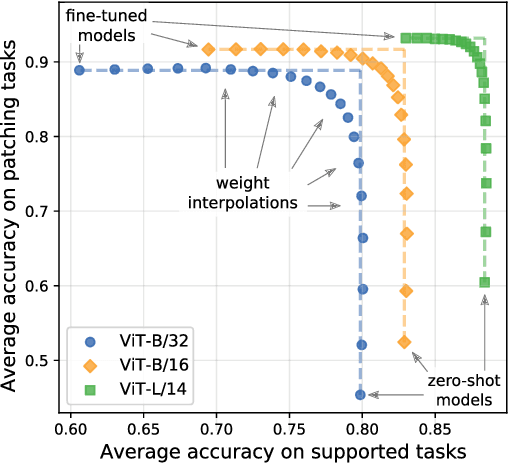

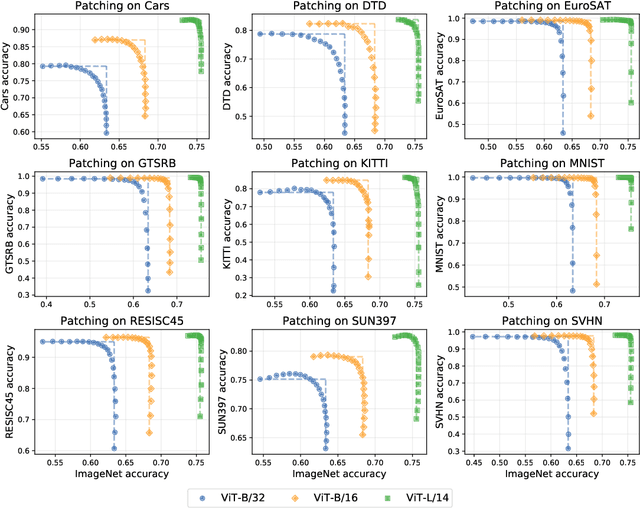

Open-vocabulary models like CLIP achieve high accuracy across many image classification tasks. However, there are still settings where their zero-shot performance is far from optimal. We study model patching, where the goal is to improve accuracy on specific tasks without degrading accuracy on tasks where performance is already adequate. Towards this goal, we introduce PAINT, a patching method that uses interpolations between the weights of a model before fine-tuning and the weights after fine-tuning on a task to be patched. On nine tasks where zero-shot CLIP performs poorly, PAINT increases accuracy by 15 to 60 percentage points while preserving accuracy on ImageNet within one percentage point of the zero-shot model. PAINT also allows a single model to be patched on multiple tasks and improves with model scale. Furthermore, we identify cases of broad transfer, where patching on one task increases accuracy on other tasks even when the tasks have disjoint classes. Finally, we investigate applications beyond common benchmarks such as counting or reducing the impact of typographic attacks on CLIP. Our findings demonstrate that it is possible to expand the set of tasks on which open-vocabulary models achieve high accuracy without re-training them from scratch.
Quality Not Quantity: On the Interaction between Dataset Design and Robustness of CLIP
Aug 10, 2022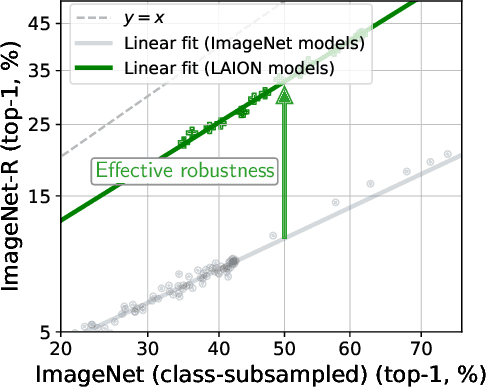
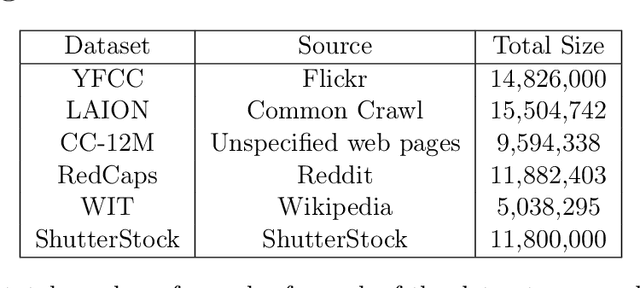
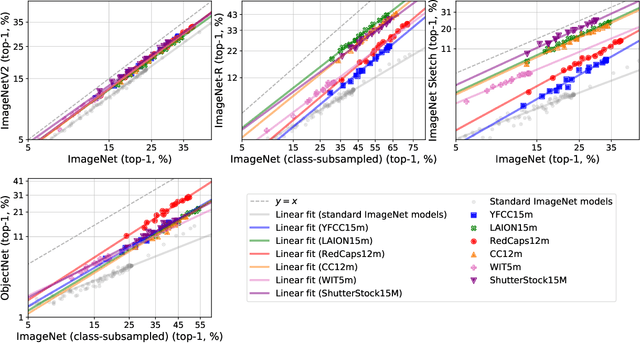
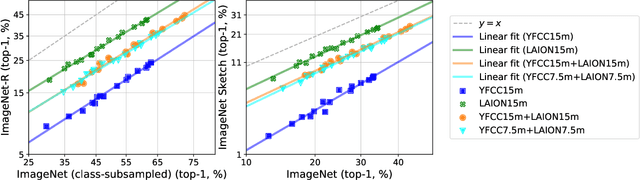
Web-crawled datasets have enabled remarkable generalization capabilities in recent image-text models such as CLIP (Contrastive Language-Image pre-training) or Flamingo, but little is known about the dataset creation processes. In this work, we introduce a testbed of six publicly available data sources - YFCC, LAION, Conceptual Captions, WIT, RedCaps, Shutterstock - to investigate how pre-training distributions induce robustness in CLIP. We find that the performance of the pre-training data varies substantially across distribution shifts, with no single data source dominating. Moreover, we systematically study the interactions between these data sources and find that combining multiple sources does not necessarily yield better models, but rather dilutes the robustness of the best individual data source. We complement our empirical findings with theoretical insights from a simple setting, where combining the training data also results in diluted robustness. In addition, our theoretical model provides a candidate explanation for the success of the CLIP-based data filtering technique recently employed in the LAION dataset. Overall our results demonstrate that simply gathering a large amount of data from the web is not the most effective way to build a pre-training dataset for robust generalization, necessitating further study into dataset design.
Data Determines Distributional Robustness in Contrastive Language Image Pre-training (CLIP)
May 03, 2022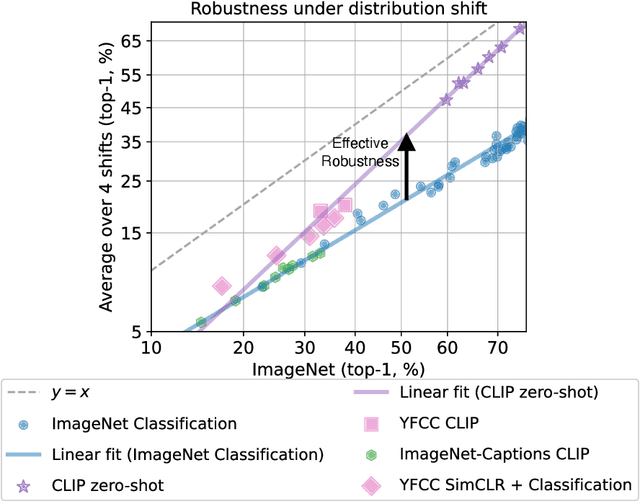
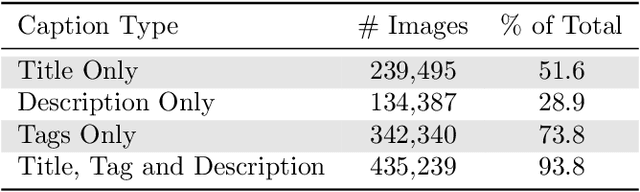
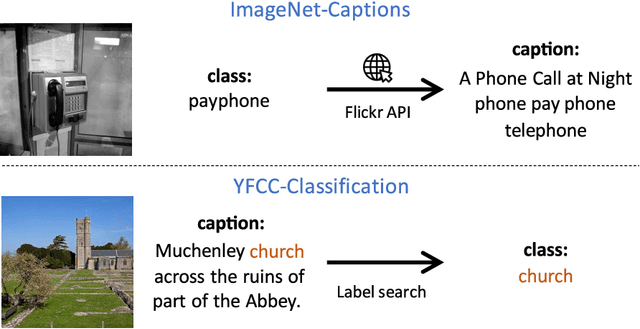

Contrastively trained image-text models such as CLIP, ALIGN, and BASIC have demonstrated unprecedented robustness to multiple challenging natural distribution shifts. Since these image-text models differ from previous training approaches in several ways, an important question is what causes the large robustness gains. We answer this question via a systematic experimental investigation. Concretely, we study five different possible causes for the robustness gains: (i) the training set size, (ii) the training distribution, (iii) language supervision at training time, (iv) language supervision at test time, and (v) the contrastive loss function. Our experiments show that the more diverse training distribution is the main cause for the robustness gains, with the other factors contributing little to no robustness. Beyond our experimental results, we also introduce ImageNet-Captions, a version of ImageNet with original text annotations from Flickr, to enable further controlled experiments of language-image training.
CLIP on Wheels: Zero-Shot Object Navigation as Object Localization and Exploration
Mar 20, 2022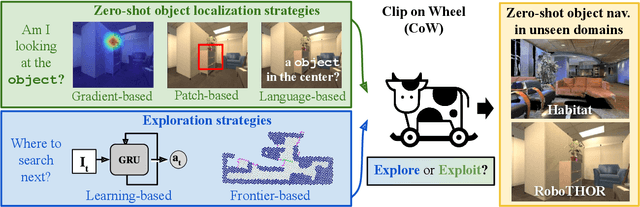

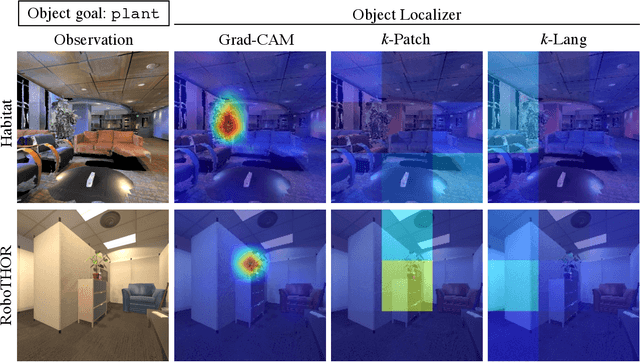
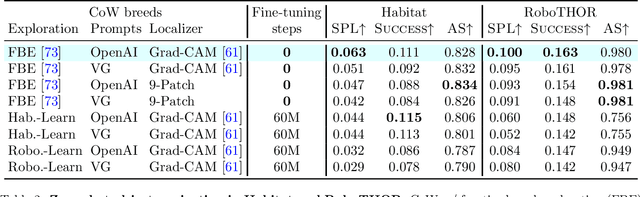
Households across the world contain arbitrary objects: from mate gourds and coffee mugs to sitars and guitars. Considering this diversity, robot perception must handle a large variety of semantic objects without additional fine-tuning to be broadly applicable in homes. Recently, zero-shot models have demonstrated impressive performance in image classification of arbitrary objects (i.e., classifying images at inference with categories not explicitly seen during training). In this paper, we translate the success of zero-shot vision models (e.g., CLIP) to the popular embodied AI task of object navigation. In our setting, an agent must find an arbitrary goal object, specified via text, in unseen environments coming from different datasets. Our key insight is to modularize the task into zero-shot object localization and exploration. Employing this philosophy, we design CLIP on Wheels (CoW) baselines for the task and evaluate each zero-shot model in both Habitat and RoboTHOR simulators. We find that a straightforward CoW, with CLIP-based object localization plus classical exploration, and no additional training, often outperforms learnable approaches in terms of success, efficiency, and robustness to dataset distribution shift. This CoW achieves 6.3% SPL in Habitat and 10.0% SPL in RoboTHOR, when tested zero-shot on all categories. On a subset of four RoboTHOR categories considered in prior work, the same CoW shows a 16.1 percentage point improvement in Success over the learnable state-of-the-art baseline.
Model soups: averaging weights of multiple fine-tuned models improves accuracy without increasing inference time
Mar 10, 2022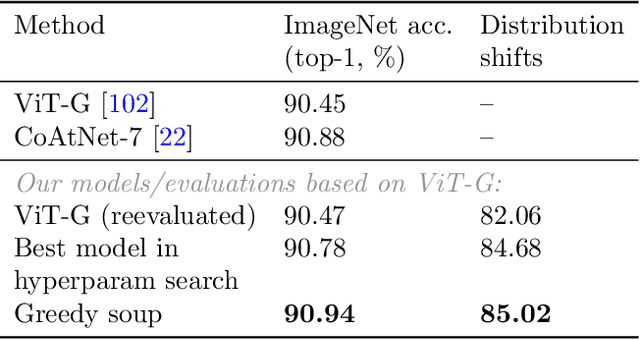
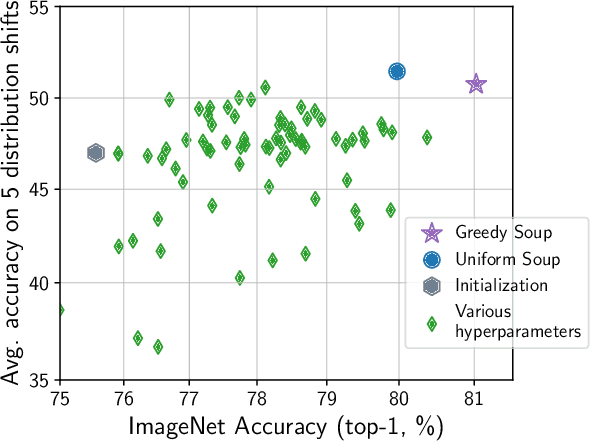
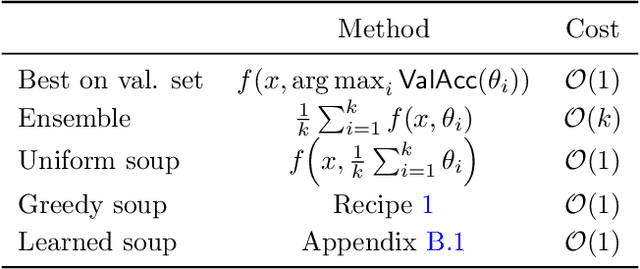
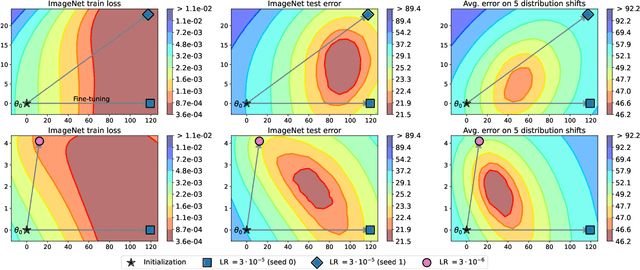
The conventional recipe for maximizing model accuracy is to (1) train multiple models with various hyperparameters and (2) pick the individual model which performs best on a held-out validation set, discarding the remainder. In this paper, we revisit the second step of this procedure in the context of fine-tuning large pre-trained models, where fine-tuned models often appear to lie in a single low error basin. We show that averaging the weights of multiple models fine-tuned with different hyperparameter configurations often improves accuracy and robustness. Unlike a conventional ensemble, we may average many models without incurring any additional inference or memory costs -- we call the results "model soups." When fine-tuning large pre-trained models such as CLIP, ALIGN, and a ViT-G pre-trained on JFT, our soup recipe provides significant improvements over the best model in a hyperparameter sweep on ImageNet. As a highlight, the resulting ViT-G model attains 90.94% top-1 accuracy on ImageNet, a new state of the art. Furthermore, we show that the model soup approach extends to multiple image classification and natural language processing tasks, improves out-of-distribution performance, and improves zero-shot performance on new downstream tasks. Finally, we analytically relate the performance similarity of weight-averaging and logit-ensembling to flatness of the loss and confidence of the predictions, and validate this relation empirically.
Robust fine-tuning of zero-shot models
Sep 04, 2021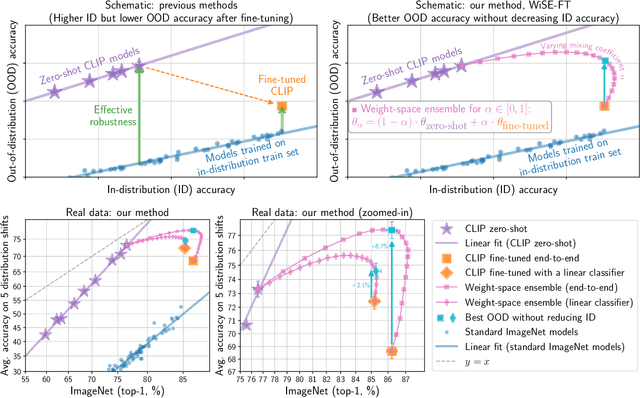
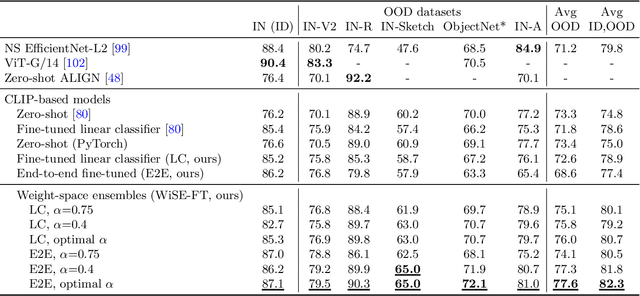
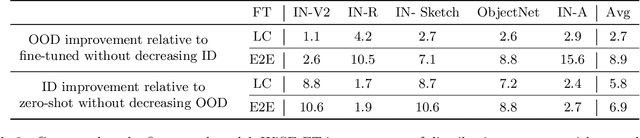
Large pre-trained models such as CLIP offer consistent accuracy across a range of data distributions when performing zero-shot inference (i.e., without fine-tuning on a specific dataset). Although existing fine-tuning approaches substantially improve accuracy in-distribution, they also reduce out-of-distribution robustness. We address this tension by introducing a simple and effective method for improving robustness: ensembling the weights of the zero-shot and fine-tuned models. Compared to standard fine-tuning, the resulting weight-space ensembles provide large accuracy improvements out-of-distribution, while matching or improving in-distribution accuracy. On ImageNet and five derived distribution shifts, weight-space ensembles improve out-of-distribution accuracy by 2 to 10 percentage points while increasing in-distribution accuracy by nearly 1 percentage point relative to standard fine-tuning. These improvements come at no additional computational cost during fine-tuning or inference.
Documenting the English Colossal Clean Crawled Corpus
Apr 18, 2021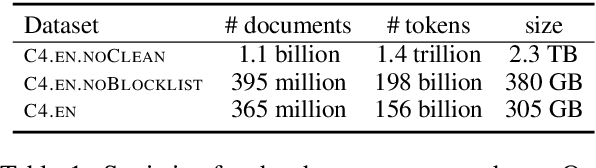
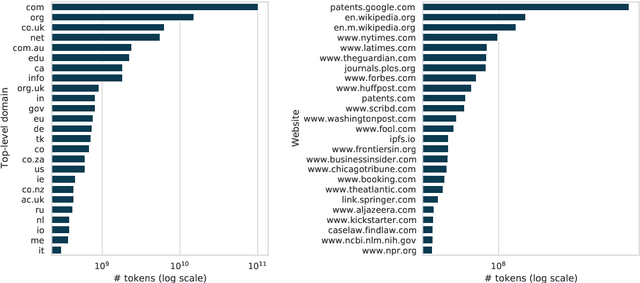
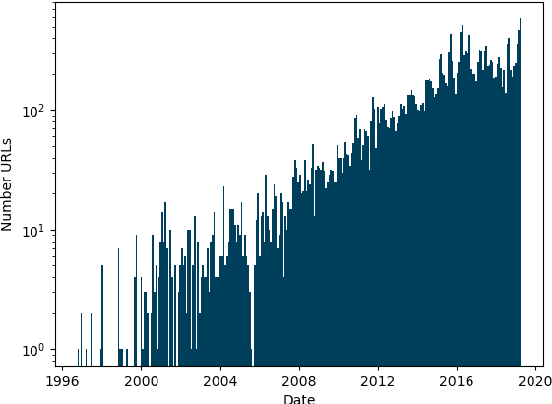
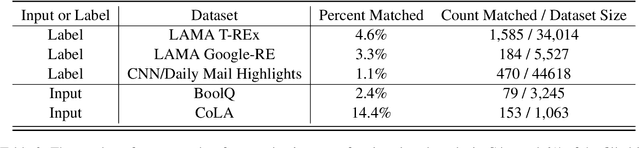
As language models are trained on ever more text, researchers are turning to some of the largest corpora available. Unlike most other types of datasets in NLP, large unlabeled text corpora are often presented with minimal documentation, and best practices for documenting them have not been established. In this work we provide the first documentation for the Colossal Clean Crawled Corpus (C4; Raffel et al., 2020), a dataset created by applying a set of filters to a single snapshot of Common Crawl. We begin with a high-level summary of the data, including distributions of where the text came from and when it was written. We then give more detailed analysis on salient parts of this data, including the most frequent sources of text (e.g., patents.google.com, which contains a significant percentage of machine translated and/or OCR'd text), the effect that the filters had on the data (they disproportionately remove text in AAE), and evidence that some other benchmark NLP dataset examples are contained in the text. We release a web interface to an interactive, indexed copy of this dataset, encouraging the community to continuously explore and report additional findings.
MultiModalQA: Complex Question Answering over Text, Tables and Images
Apr 13, 2021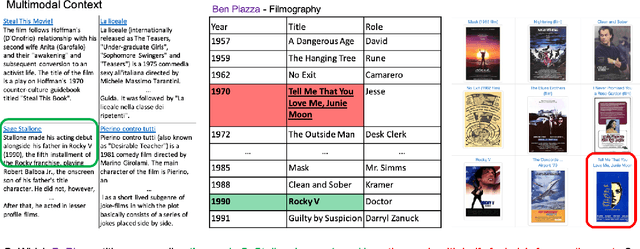
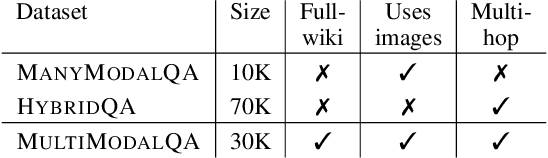

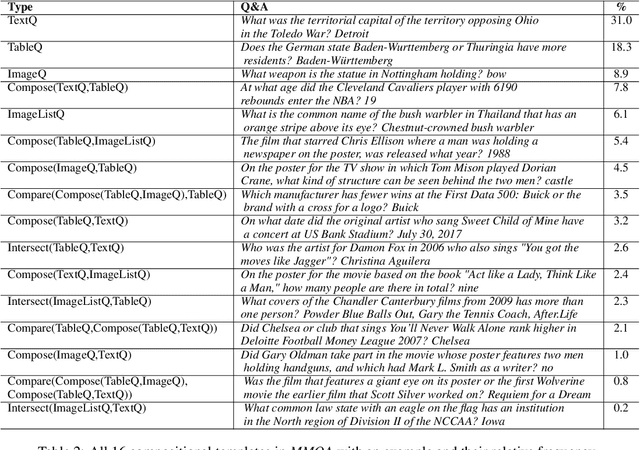
When answering complex questions, people can seamlessly combine information from visual, textual and tabular sources. While interest in models that reason over multiple pieces of evidence has surged in recent years, there has been relatively little work on question answering models that reason across multiple modalities. In this paper, we present MultiModalQA(MMQA): a challenging question answering dataset that requires joint reasoning over text, tables and images. We create MMQA using a new framework for generating complex multi-modal questions at scale, harvesting tables from Wikipedia, and attaching images and text paragraphs using entities that appear in each table. We then define a formal language that allows us to take questions that can be answered from a single modality, and combine them to generate cross-modal questions. Last, crowdsourcing workers take these automatically-generated questions and rephrase them into more fluent language. We create 29,918 questions through this procedure, and empirically demonstrate the necessity of a multi-modal multi-hop approach to solve our task: our multi-hop model, ImplicitDecomp, achieves an average F1of 51.7 over cross-modal questions, substantially outperforming a strong baseline that achieves 38.2 F1, but still lags significantly behind human performance, which is at 90.1 F1
Contrasting Contrastive Self-Supervised Representation Learning Models
Mar 25, 2021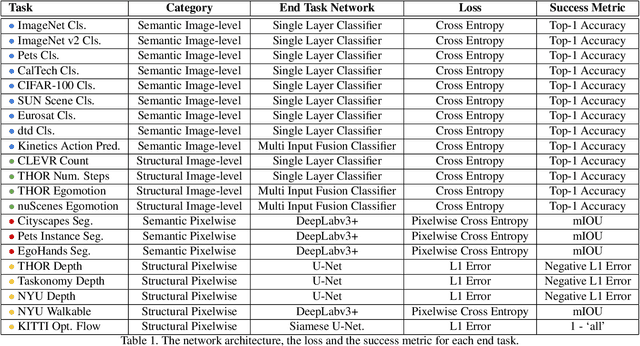
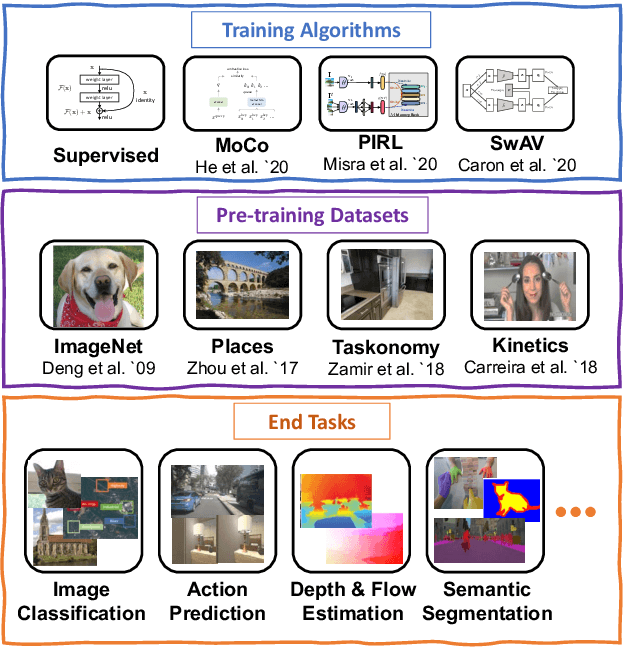
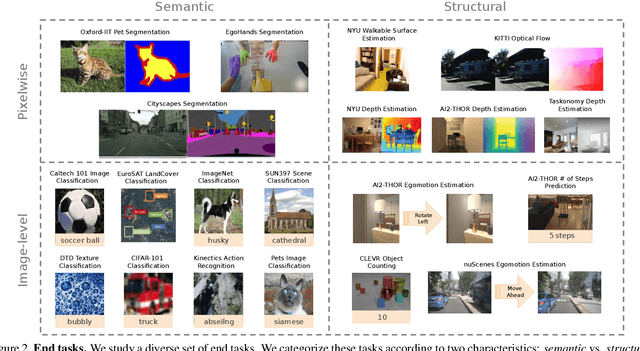
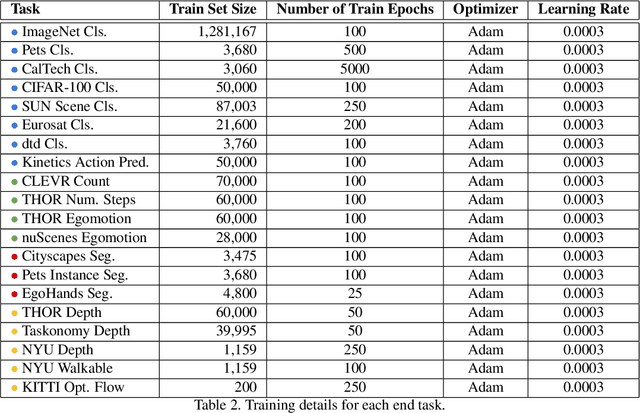
In the past few years, we have witnessed remarkable breakthroughs in self-supervised representation learning. Despite the success and adoption of representations learned through this paradigm, much is yet to be understood about how different training methods and datasets influence performance on downstream tasks. In this paper, we analyze contrastive approaches as one of the most successful and popular variants of self-supervised representation learning. We perform this analysis from the perspective of the training algorithms, pre-training datasets and end tasks. We examine over 700 training experiments including 30 encoders, 4 pre-training datasets and 20 diverse downstream tasks. Our experiments address various questions regarding the performance of self-supervised models compared to their supervised counterparts, current benchmarks used for evaluation, and the effect of the pre-training data on end task performance. We hope the insights and empirical evidence provided by this work will help future research in learning better visual representations.