 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVertical Sub-THz Channel Characterization: Sounder Implementation and Initial Measurements
Jun 13, 2026We present a measurement-based characterization of indoor vertical ceiling-to-ground sub-THz channels in the 136-144 GHz band, motivated by ceiling-mounted radio-unit deployments for future distributed indoor networks. The measurements are performed using a vector network analyzer (VNA)-based channel sounder with a mechanically scanned planar virtual antenna array (VAA) at the receiver, enabling single-input single-output (SISO), small-array single-input multiple-output (SIMO), and large-array SIMO measurements in three indoor environments: an office, a laboratory, and a ventilation room. The small-array and large-array SIMO measurements synthesize 2 X 2 cm and 30 X 1 cm uniform rectangular arrays (URAs), respectively. The results show that the vertical links are generally dominated by a strong Line-of-Sight (LOS) component close to the ceiling-to-ground direction, but with clear environmental differences. The office and laboratory exhibit relatively limited delay dispersion, whereas the ventilation room shows stronger delayed multipath due to its corrugated metallic ceiling and surrounding metallic structures. The measured root mean square (RMS) delay spreads are 0.55-1.74 ns for the small-array measurements and 0.44-2.57 ns for the large-array measurements, smaller than those reported in several horizontal indoor sub-THz measurement campaigns at similar frequencies. However, the channel is not purely free-space. Repeatable second-order reflections involving the receiver table, ceiling, transmitter structure, and ceiling-mounted objects are observed in all environments. The large-array measurements further reveal spatial non-stationarity along the 30 cm aperture, with several multipath components visible only over limited parts of the array. These results show that ceiling materials, obstructions, and aperture-dependent variations matter in vertical sub-THz channel modeling.
On the Feasibility of Human Presence Detection Using Ceiling-Mounted Sub-THz Channel Sounding: Conference Room Measurement
Jun 13, 2026This paper presents a measurement-based investigation on the feasibility of human presence detection using a ceiling-mounted sub-THz channel sounder operating from 134 to 146~GHz. Wideband channel measurements were conducted in an indoor conference room under empty-room, human-present, and water-filled mannequin scenarios across five spatial positions. The measurements were performed using a vector network analyzer combined with sub-THz frequency extenders. Two antenna beamwidth configurations were used, one with a highly directive horn antenna on the transmitter side and one with a less directive, open-waveguide transmitter. The measured channel responses were transformed into calibrated power delay profiles and analyzed using normalized channel variation metrics in the delay domain. The results show that human detection is strongly dependent on target position relative to the ceiling-mounted transmitter and receiver as well as on antenna beamwidth. Furthermore, repeated empty-room measurements reveal that small environmental changes, such as slight furniture displacement, introduce non-negligible channel variations that must be considered when evaluating detection performance. In the wide-beam open-waveguide configuration, the human-present measurements produced lower values of the delay-domain variation metric than the repeated empty-room baseline, whereas the water-filled mannequin produced values at or above this baseline across all positions. With the directive transmitter, the human response exceeded the baseline significantly but only at favorable positions, especially P1 and P2, showing that the sensing response remains spatially selective. These findings provide experimental insight into the capabilities and limitations of ceiling-mounted sub-THz sensing for future integrated sensing and communication systems.
Probabilistic Occupancy Grid for Radio-Based SLAM
Mar 03, 2026Sensing is an integral part of 6G and beyond systems, providing exceptional environmental perception along with communication. RF-based sensing often relies on simplified geometric assumptions (e.g., point scatterers or planar surfaces) to model specular multipath and keep inference tractable. However, such representations are not physically informative and fail to accurately capture extended objects with complex shapes and properties. This paper presents a probabilistic occupancy grid framework for radio-based simultaneous localization and mapping (SLAM), jointly reconstructing geometric structures and their radio-related properties. The proposed occupancy grid map representation is integrated into a multipath-based SLAM (MP-SLAM) formulation to enable simultaneous mobile-agent localization and environment mapping using multipath measurements. To connect RF measurements with the grid map, a surface model is employed to describe candidate reflection paths, while occupancy grid cell states capture measurement uncertainties and fine--grained geometric details. Object RF-related properties are modeled via reflection coefficients. The proposed framework offers a principled, proof-of-concept approach to physically interpretable radio-based mapping, and simulation results demonstrate accurate reconstruction of geometry and material properties, as well as high-accuracy localization. In addition, the results highlight the potential to use prior occupancy maps obtained from other radio devices or complementary sensors for subsequent map extension and refinement.
Vehicular Wireless Positioning -- A Survey
Jan 28, 2026The rapid advancement of connected and autonomous vehicles has driven a growing demand for precise and reliable positioning systems capable of operating in complex environments. Meeting these demands requires an integrated approach that combines multiple positioning technologies, including wireless-based systems, perception-based technologies, and motion-based sensors. This paper presents a comprehensive survey of wireless-based positioning for vehicular applications, with a focus on satellite-based positioning (such as global navigation satellite systems (GNSS) and low-Earth-orbit (LEO) satellites), cellular-based positioning (5G and beyond), and IEEE-based technologies (including Wi-Fi, ultrawideband (UWB), Bluetooth, and vehicle-to-vehicle (V2V) communications). First, the survey reviews a wide range of vehicular positioning use cases, outlining their specific performance requirements. Next, it explores the historical development, standardization, and evolution of each wireless positioning technology, providing an in-depth categorization of existing positioning solutions and algorithms, and identifying open challenges and contemporary trends. Finally, the paper examines sensor fusion techniques that integrate these wireless systems with onboard perception and motion sensors to enhance positioning accuracy and resilience in real-world conditions. This survey thus offers a holistic perspective on the historical foundations, current advancements, and future directions of wireless-based positioning for vehicular applications, addressing a critical gap in the literature.
Performance Analysis of Digital Beamforming mmWave MIMO with Low-Resolution DACs/ADCs
Jan 22, 2026Future wireless communications will rely on multiple-input multiple-output (MIMO) beamforming operating at millimeter wave (mmWave) frequency bands to deliver high data rates. To support flexible spatial processing and meet the demands of latency critical applications, it is essential to use fully digital mmWave MIMO beamforming, which relies on accurate channel estimation. However, ensuring power efficiency in fully digital mmWave MIMO systems requires the use of low-resolution digital-to-analog converters (DACs) and analog-to-digital converters (ADCs). The reduced resolution of these quantizers introduces distortion in both transmitted and received signals, ultimately degrading system performance. In this paper, we investigate the channel estimation performance of mmWave MIMO systems employing fully digital beamforming with low-resolution quantization, under practical system constraints. We evaluate the system performance in terms of spectral efficiency (SE) and energy efficiency (EE). Simulation results demonstrate that a moderate quantization resolutions of 4-bit per DAC/ADC offers a favorable trade-off between energy consumption and achievable data rate.
* Published at the IEEE Radio and Antenna Days of the Indian Ocean (RADIO), 2025
Distributed MIMO Positioning: Fundamental Limit Analysis and User Tracking Framework Design
Nov 17, 2025This paper presents a comprehensive study on the 3D positioning capabilities in distributed multiple-input multiple-output (MIMO) systems. Unlike previous studies that mainly rely on idealized isotropic antenna models, we adopt a polarimetric model that takes advantage of effective aperture distribution functions to characterize realistic antenna patterns, placements, and polarization effects. Based on this model, we analyze the fundamental limits of UE positioning using the Fisher information matrix (FIM) and the position error bound (PEB). The FIM is shown to be expressed as a weighted sum of the information contributions from individual access point (AP)-UE pairs, with each contribution interpreted geometrically across distance, azimuth, and elevation dimensions. The impact of the UE tilt and the spatial distribution of APs on the PEBs is further analyzed. As a further advancement, we propose a complete positioning framework from a UE tracking perspective. By integrating a global probability hypothesis density filter and a PEB-aware AP management strategy, the framework enables accurate tracking while optimizing AP scheduling. Finally, we present a distributed MIMO channel measurement campaign to validate the proposed framework. The results demonstrate a centimeter-level tracking accuracy. In addition, the PEB-aware AP management strategy is shown to maintain robust tracking performance while significantly reducing the number of concurrently active APs, thus lowering the overall system overhead.
3D Cooperative User Tracking for Distributed Integrated Sensing and Communication
Nov 05, 2025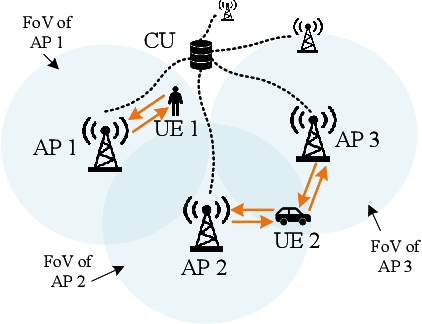
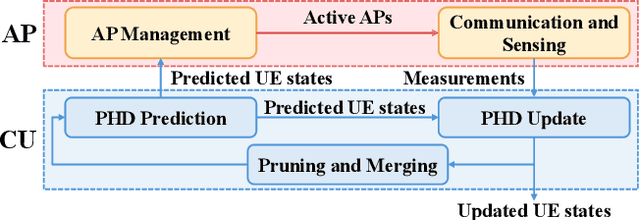
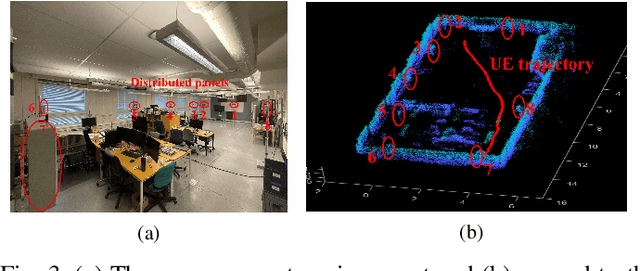
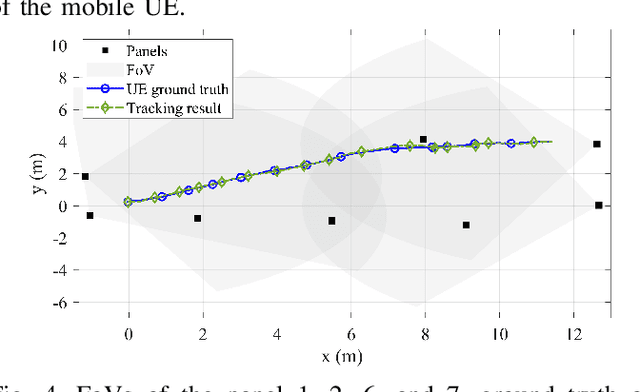
As integrated sensing and communication (ISAC) becomes an integral part of 6G networks, distributed ISAC (DISAC) is expected to enhance both sensing and communication performance through its decentralized architecture. This paper presents a complete framework to address the challenge of cooperative user tracking in DISAC systems. By incorporating a global probability hypothesis density (PHD) filter and a field-of-view-aware access point (AP) management strategy, the framework enables accurate user tracking using radio signals while optimizing AP scheduling. In addition, a real-world distributed MIMO channel measurement campaign is performed to evaluate the effectiveness of the framework. The results demonstrate that a centimeter-level root mean-square trajectory error can be achieved. Furthermore, the results show that it is not necessary to keep APs active at all times to maintain high tracking accuracy, indicating the need for robust and efficient AP management. These findings provide valuable insight into practical deployments and further development of cooperative user tracking techniques in DISAC systems.
Experimental Analysis of Multipath Characteristics in Indoor Distributed Massive MIMO Channels
Apr 16, 2025



Distributed massive multiple-input multiple-output (MIMO), also known as cell-free massive MIMO, has emerged as a promising technology for sixth-generation (6G) wireless networks. This letter introduces an indoor channel measurement campaign designed to explore the behavior of multipath components (MPCs) in distributed massive MIMO channels. Fully coherent channels were measured between eight distributed uniform planar arrays (128 elements in total) and a 12-meter user equipment route. Furthermore, a method is introduced to determine the order (single- or multi-bounce) of MPC interaction by leveraging map information and MPC parameters. In addition, a Kalman filter-based framework is used for identifying the MPC interaction mechanisms (reflection or scattering/diffraction/mixed). Finally, a comprehensive MPC-level characterization is performed based on the measured channels, including the significance of the single-bounce MPCs, the spherical wavefront features, the birth-and-death processes of the MPCs, and the spatial distribution of reflections. The findings serve as a valuable reference for understanding MPC propagation behavior, which is necessary for accurate modeling of indoor distributed massive MIMO channels.
Interacting Object-Enabled Clustering and Characterization of Distributed MIMO Channels
Apr 16, 2025Distributed multiple-input multiple-output (MIMO), also known as cell-free massive MIMO, emerges as a promising technology for sixth-generation (6G) systems to support uniform coverage and reliable communication. For the design and optimization of such systems, measurement-based investigations of real-world distributed MIMO channels are essential. In this paper, we present an indoor channel measurement campaign, featuring eight distributed antenna arrays with 128 elements in total. Multi-link channels are measured at 50 positions along a 12-meter user route. A clustering algorithm enabled by interacting objects is proposed to identify clusters in the measured channels. The algorithm jointly clusters the multipath components for all links, effectively capturing the dynamic contributions of common clusters to different links. In addition, a Kalman filter-based tracking framework is introduced for cluster prediction, tracking, and updating along the user movement. Using the clustering and tracking results, cluster-level characterization of the measured channels is performed. First, the number of clusters and their visibility at both link ends are analyzed. Next, a maximum-likelihood estimator is utilized to determine the entire cluster visibility region length. Finally, key cluster-level properties, including the common cluster ratio, cluster power, shadowing, spread, among others, are statistically investigated. The results provide valuable insights into cluster behavior in typical multi-link channels, necessary for accurate modeling of distributed MIMO channels.
Low-Complexity Optimization of Antenna Switching Schemes for Dynamic Channel Sounding
Apr 10, 2025



Understanding wireless channels is crucial for the design of wireless systems. For mobile communication, sounders and antenna arrays with short measurement times are required to simultaneously capture the dynamic and spatial channel characteristics. Switched antenna arrays are an attractive option that can overcome the high cost of real arrays and the long measurement times of virtual arrays. Optimization of the switching sequences is then essential to avoid aliasing and increase the accuracy of channel parameter estimates. This paper provides a novel and comprehensive analysis of the design of switching sequences. We first review the conventional spatio-temporal ambiguity function, extend it to dual-polarized antenna arrays, and analyze its prohibitive complexity when designing for ultra-massive antenna arrays. We thus propose a new method that uses the Fisher information matrix to tackle the estimation accuracy. We also propose to minimize the ambiguity by choosing a switching sequence that minimizes side lobes in its Fourier spectrum. In this sense, we divide the sequence design problem into Fourier-based ambiguity reduction and Fisher-based accuracy improvement, and coin the resulting design approach as Fourier-Fisher. Simulations and measurements show that the Fourier-Fisher approach achieves identical performance and significantly lower computational complexity than that of the conventional ambiguity-based approach.