 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStoryBench: A Multifaceted Benchmark for Continuous Story Visualization
Aug 22, 2023



Generating video stories from text prompts is a complex task. In addition to having high visual quality, videos need to realistically adhere to a sequence of text prompts whilst being consistent throughout the frames. Creating a benchmark for video generation requires data annotated over time, which contrasts with the single caption used often in video datasets. To fill this gap, we collect comprehensive human annotations on three existing datasets, and introduce StoryBench: a new, challenging multi-task benchmark to reliably evaluate forthcoming text-to-video models. Our benchmark includes three video generation tasks of increasing difficulty: action execution, where the next action must be generated starting from a conditioning video; story continuation, where a sequence of actions must be executed starting from a conditioning video; and story generation, where a video must be generated from only text prompts. We evaluate small yet strong text-to-video baselines, and show the benefits of training on story-like data algorithmically generated from existing video captions. Finally, we establish guidelines for human evaluation of video stories, and reaffirm the need of better automatic metrics for video generation. StoryBench aims at encouraging future research efforts in this exciting new area.
Phenaki: Variable Length Video Generation From Open Domain Textual Description
Oct 05, 2022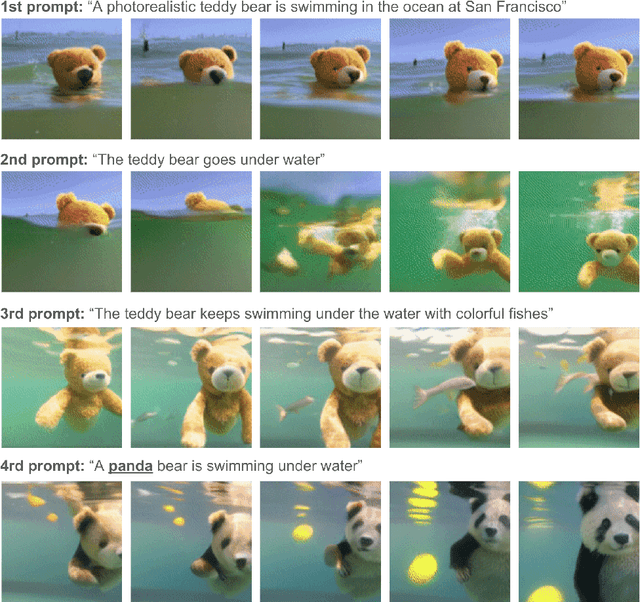
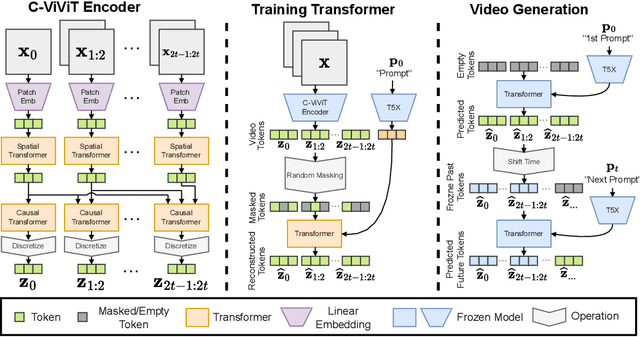
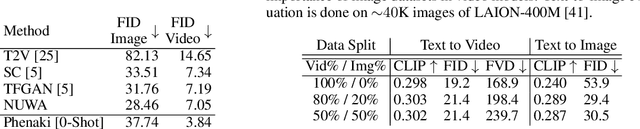
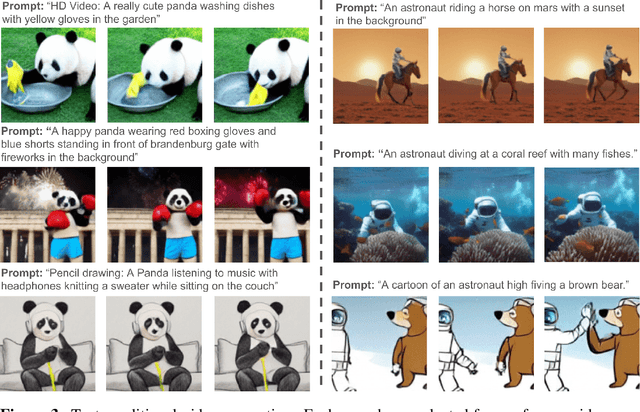
We present Phenaki, a model capable of realistic video synthesis, given a sequence of textual prompts. Generating videos from text is particularly challenging due to the computational cost, limited quantities of high quality text-video data and variable length of videos. To address these issues, we introduce a new model for learning video representation which compresses the video to a small representation of discrete tokens. This tokenizer uses causal attention in time, which allows it to work with variable-length videos. To generate video tokens from text we are using a bidirectional masked transformer conditioned on pre-computed text tokens. The generated video tokens are subsequently de-tokenized to create the actual video. To address data issues, we demonstrate how joint training on a large corpus of image-text pairs as well as a smaller number of video-text examples can result in generalization beyond what is available in the video datasets. Compared to the previous video generation methods, Phenaki can generate arbitrary long videos conditioned on a sequence of prompts (i.e. time variable text or a story) in open domain. To the best of our knowledge, this is the first time a paper studies generating videos from time variable prompts. In addition, compared to the per-frame baselines, the proposed video encoder-decoder computes fewer tokens per video but results in better spatio-temporal consistency.
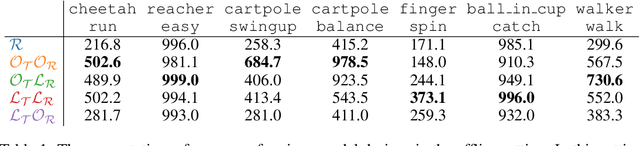
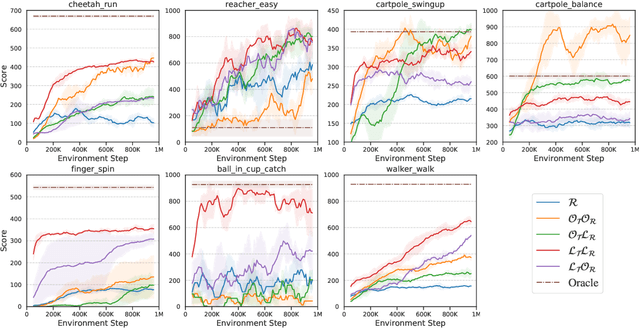
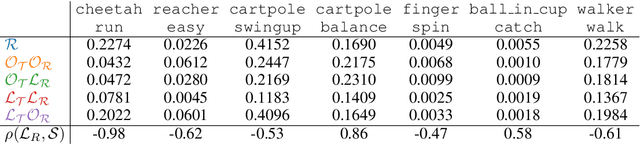
INFOrmation Prioritization through EmPOWERment in Visual Model-Based RL
Apr 18, 2022
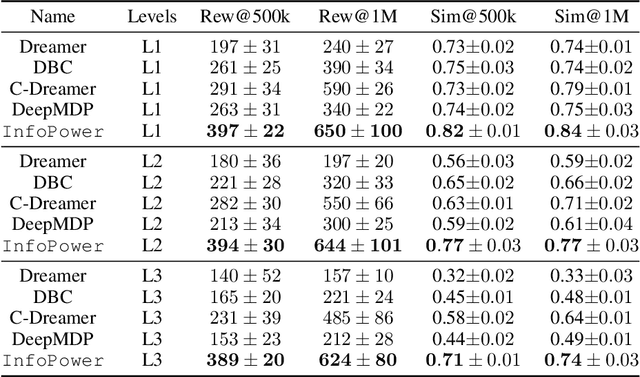
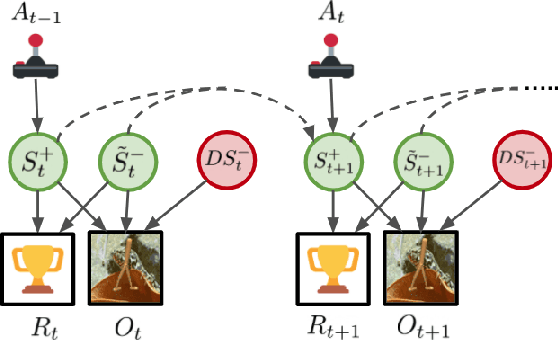
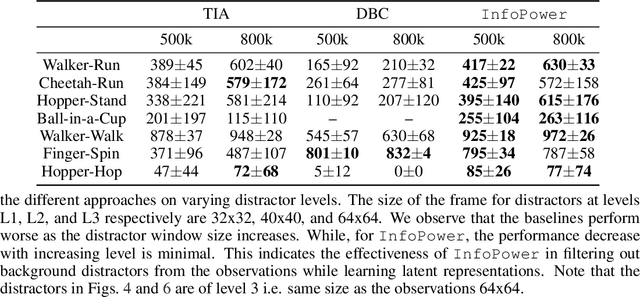
Model-based reinforcement learning (RL) algorithms designed for handling complex visual observations typically learn some sort of latent state representation, either explicitly or implicitly. Standard methods of this sort do not distinguish between functionally relevant aspects of the state and irrelevant distractors, instead aiming to represent all available information equally. We propose a modified objective for model-based RL that, in combination with mutual information maximization, allows us to learn representations and dynamics for visual model-based RL without reconstruction in a way that explicitly prioritizes functionally relevant factors. The key principle behind our design is to integrate a term inspired by variational empowerment into a state-space model based on mutual information. This term prioritizes information that is correlated with action, thus ensuring that functionally relevant factors are captured first. Furthermore, the same empowerment term also promotes faster exploration during the RL process, especially for sparse-reward tasks where the reward signal is insufficient to drive exploration in the early stages of learning. We evaluate the approach on a suite of vision-based robot control tasks with natural video backgrounds, and show that the proposed prioritized information objective outperforms state-of-the-art model based RL approaches with higher sample efficiency and episodic returns. https://sites.google.com/view/information-empowerment
FitVid: Overfitting in Pixel-Level Video Prediction
Jun 24, 2021
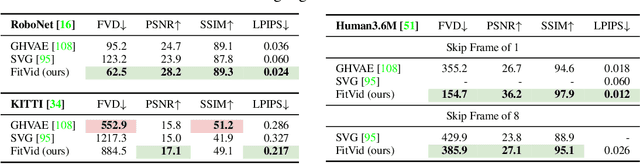
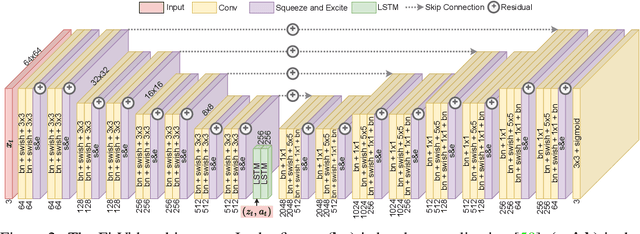
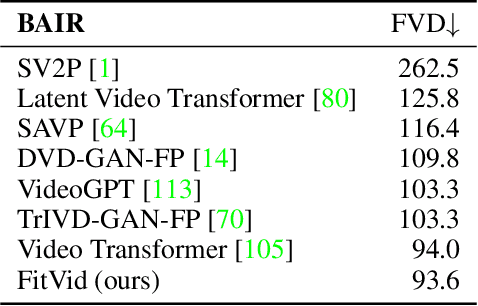
An agent that is capable of predicting what happens next can perform a variety of tasks through planning with no additional training. Furthermore, such an agent can internally represent the complex dynamics of the real-world and therefore can acquire a representation useful for a variety of visual perception tasks. This makes predicting the future frames of a video, conditioned on the observed past and potentially future actions, an interesting task which remains exceptionally challenging despite many recent advances. Existing video prediction models have shown promising results on simple narrow benchmarks but they generate low quality predictions on real-life datasets with more complicated dynamics or broader domain. There is a growing body of evidence that underfitting on the training data is one of the primary causes for the low quality predictions. In this paper, we argue that the inefficient use of parameters in the current video models is the main reason for underfitting. Therefore, we introduce a new architecture, named FitVid, which is capable of severe overfitting on the common benchmarks while having similar parameter count as the current state-of-the-art models. We analyze the consequences of overfitting, illustrating how it can produce unexpected outcomes such as generating high quality output by repeating the training data, and how it can be mitigated using existing image augmentation techniques. As a result, FitVid outperforms the current state-of-the-art models across four different video prediction benchmarks on four different metrics.
Models, Pixels, and Rewards: Evaluating Design Trade-offs in Visual Model-Based Reinforcement Learning
Dec 08, 2020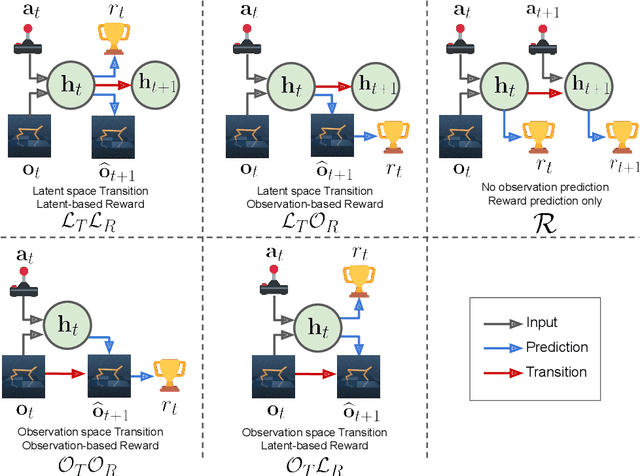
Model-based reinforcement learning (MBRL) methods have shown strong sample efficiency and performance across a variety of tasks, including when faced with high-dimensional visual observations. These methods learn to predict the environment dynamics and expected reward from interaction and use this predictive model to plan and perform the task. However, MBRL methods vary in their fundamental design choices, and there is no strong consensus in the literature on how these design decisions affect performance. In this paper, we study a number of design decisions for the predictive model in visual MBRL algorithms, focusing specifically on methods that use a predictive model for planning. We find that a range of design decisions that are often considered crucial, such as the use of latent spaces, have little effect on task performance. A big exception to this finding is that predicting future observations (i.e., images) leads to significant task performance improvement compared to only predicting rewards. We also empirically find that image prediction accuracy, somewhat surprisingly, correlates more strongly with downstream task performance than reward prediction accuracy. We show how this phenomenon is related to exploration and how some of the lower-scoring models on standard benchmarks (that require exploration) will perform the same as the best-performing models when trained on the same training data. Simultaneously, in the absence of exploration, models that fit the data better usually perform better on the downstream task as well, but surprisingly, these are often not the same models that perform the best when learning and exploring from scratch. These findings suggest that performance and exploration place important and potentially contradictory requirements on the model.
SurfelGAN: Synthesizing Realistic Sensor Data for Autonomous Driving
May 08, 2020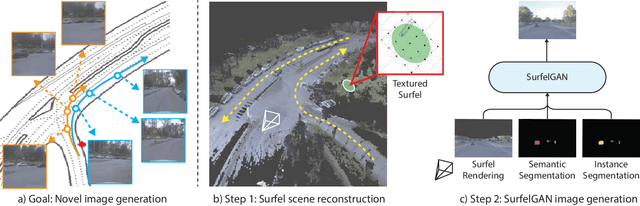
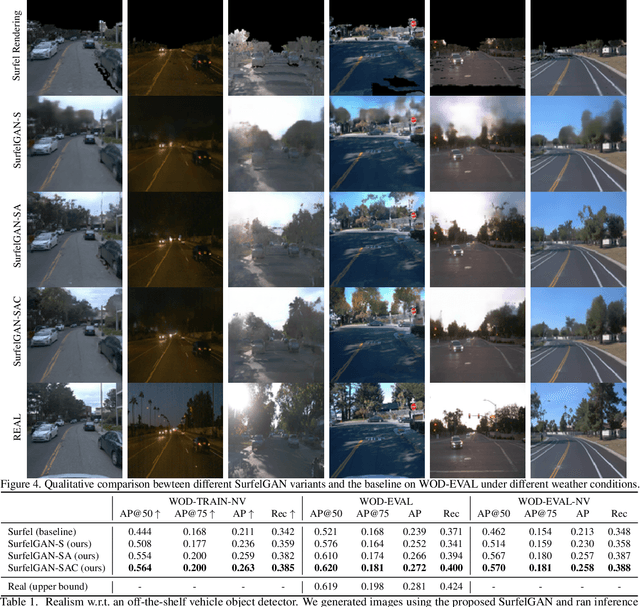

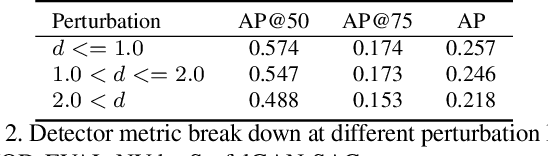
Autonomous driving system development is critically dependent on the ability to replay complex and diverse traffic scenarios in simulation. In such scenarios, the ability to accurately simulate the vehicle sensors such as cameras, lidar or radar is essential. However, current sensor simulators leverage gaming engines such as Unreal or Unity, requiring manual creation of environments, objects and material properties. Such approaches have limited scalability and fail to produce realistic approximations of camera, lidar, and radar data without significant additional work. In this paper, we present a simple yet effective approach to generate realistic scenario sensor data, based only on a limited amount of lidar and camera data collected by an autonomous vehicle. Our approach uses texture-mapped surfels to efficiently reconstruct the scene from an initial vehicle pass or set of passes, preserving rich information about object 3D geometry and appearance, as well as the scene conditions. We then leverage a SurfelGAN network to reconstruct realistic camera images for novel positions and orientations of the self-driving vehicle and moving objects in the scene. We demonstrate our approach on the Waymo Open Dataset and show that it can synthesize realistic camera data for simulated scenarios. We also create a novel dataset that contains cases in which two self-driving vehicles observe the same scene at the same time. We use this dataset to provide additional evaluation and demonstrate the usefulness of our SurfelGAN model.
High Fidelity Video Prediction with Large Stochastic Recurrent Neural Networks
Nov 05, 2019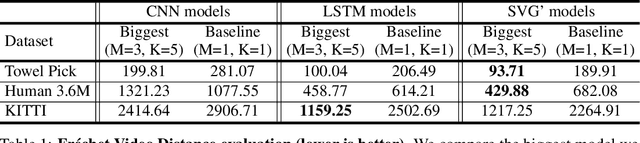
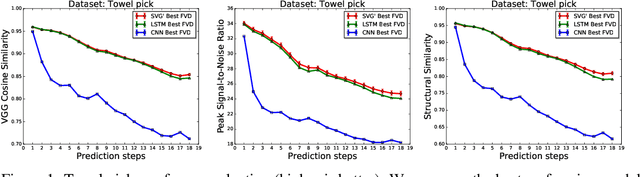
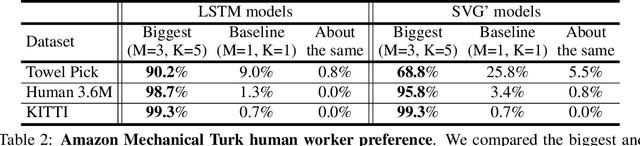
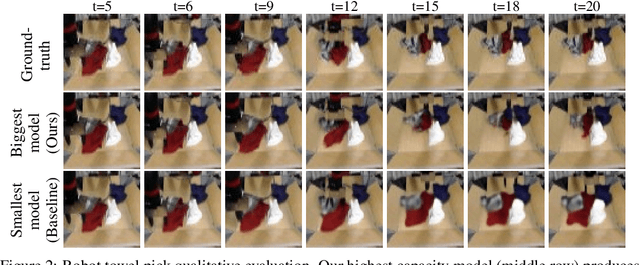
Predicting future video frames is extremely challenging, as there are many factors of variation that make up the dynamics of how frames change through time. Previously proposed solutions require complex inductive biases inside network architectures with highly specialized computation, including segmentation masks, optical flow, and foreground and background separation. In this work, we question if such handcrafted architectures are necessary and instead propose a different approach: finding minimal inductive bias for video prediction while maximizing network capacity. We investigate this question by performing the first large-scale empirical study and demonstrate state-of-the-art performance by learning large models on three different datasets: one for modeling object interactions, one for modeling human motion, and one for modeling car driving.
Model-Based Reinforcement Learning for Atari
Mar 05, 2019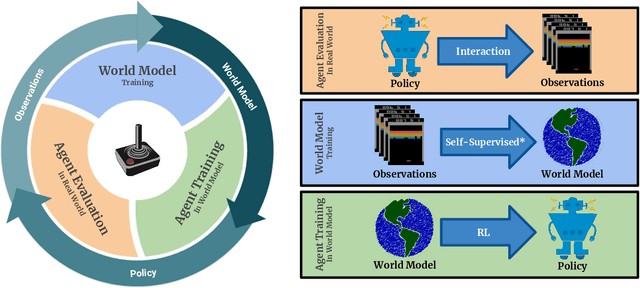
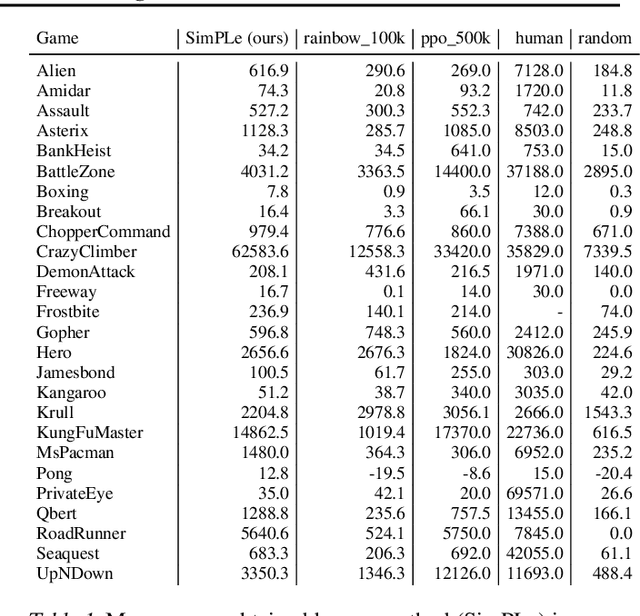
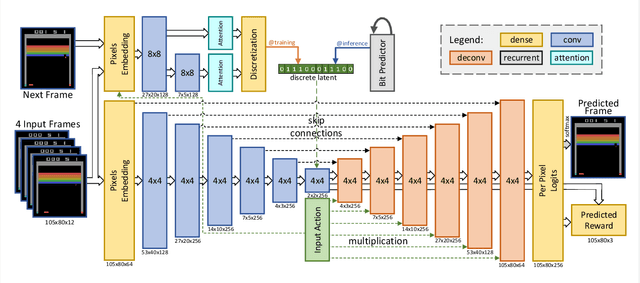
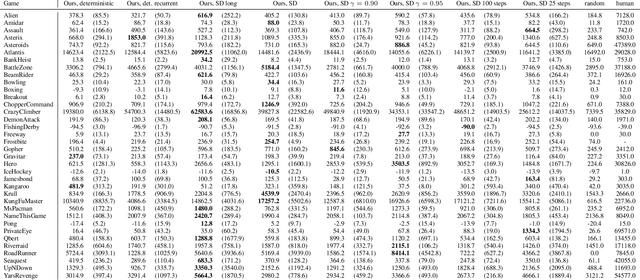
Model-free reinforcement learning (RL) can be used to learn effective policies for complex tasks, such as Atari games, even from image observations. However, this typically requires very large amounts of interaction -- substantially more, in fact, than a human would need to learn the same games. How can people learn so quickly? Part of the answer may be that people can learn how the game works and predict which actions will lead to desirable outcomes. In this paper, we explore how video prediction models can similarly enable agents to solve Atari games with orders of magnitude fewer interactions than model-free methods. We describe Simulated Policy Learning (SimPLe), a complete model-based deep RL algorithm based on video prediction models and present a comparison of several model architectures, including a novel architecture that yields the best results in our setting. Our experiments evaluate SimPLe on a range of Atari games and achieve competitive results with only 100K interactions between the agent and the environment (400K frames), which corresponds to about two hours of real-time play.
VideoFlow: A Flow-Based Generative Model for Video
Mar 04, 2019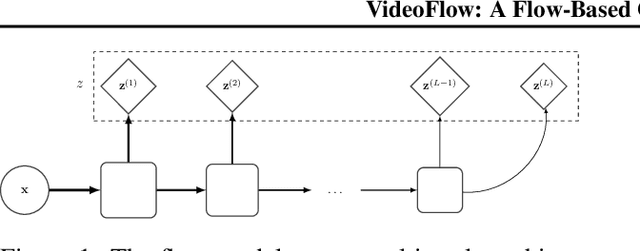

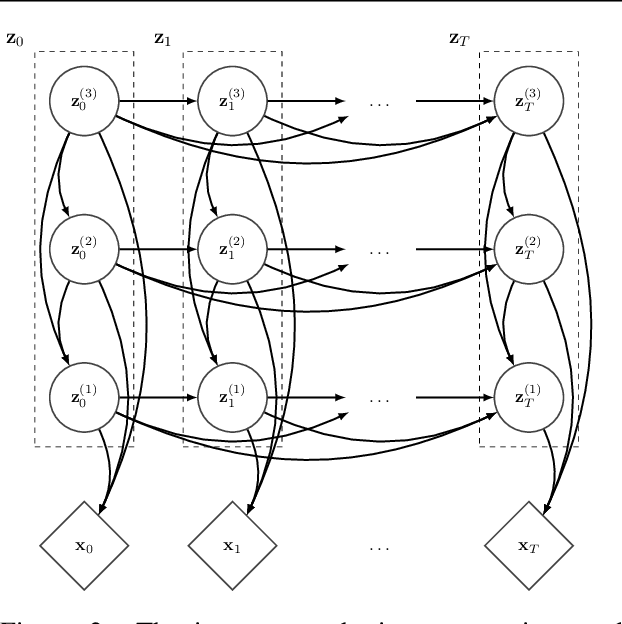
Generative models that can model and predict sequences of future events can, in principle, learn to capture complex real-world phenomena, such as physical interactions. In particular, learning predictive models of videos offers an especially appealing mechanism to enable a rich understanding of the physical world: videos of real-world interactions are plentiful and readily available, and a model that can predict future video frames can not only capture useful representations of the world, but can be useful in its own right, for problems such as model-based robotic control. However, a central challenge in video prediction is that the future is highly uncertain: a sequence of past observations of events can imply many possible futures. Although a number of recent works have studied probabilistic models that can represent uncertain futures, such models are either extremely expensive computationally (as in the case of pixel-level autoregressive models), or do not directly optimize the likelihood of the data. In this work, we propose a model for video prediction based on normalizing flows, which allows for direct optimization of the data likelihood, and produces high-quality stochastic predictions. To our knowledge, our work is the first to propose multi-frame video prediction with normalizing flows. We describe an approach for modeling the latent space dynamics, and demonstrate that flow-based generative models offer a viable and competitive approach to generative modeling of video.
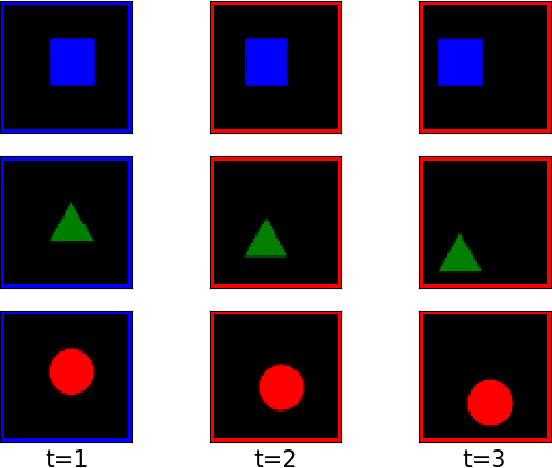
Evaluating Feature Importance Estimates
Jun 28, 2018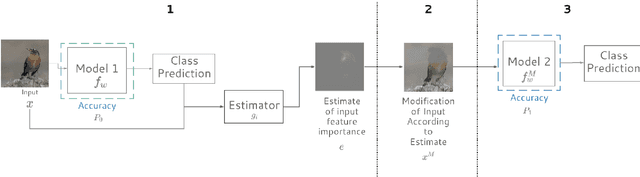
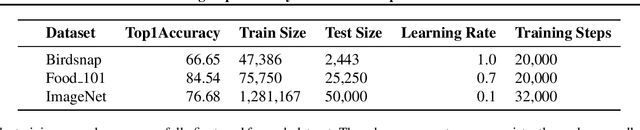
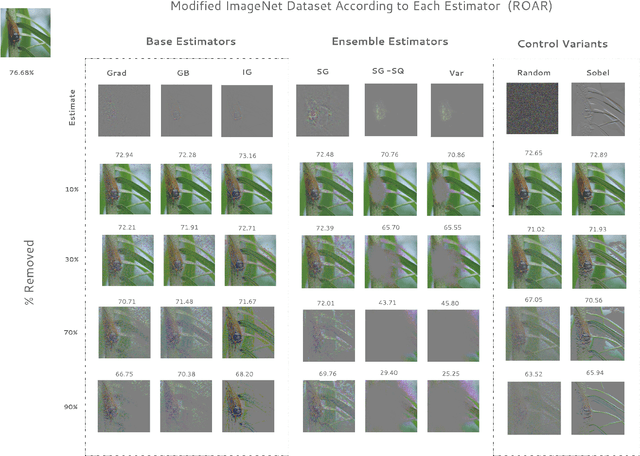
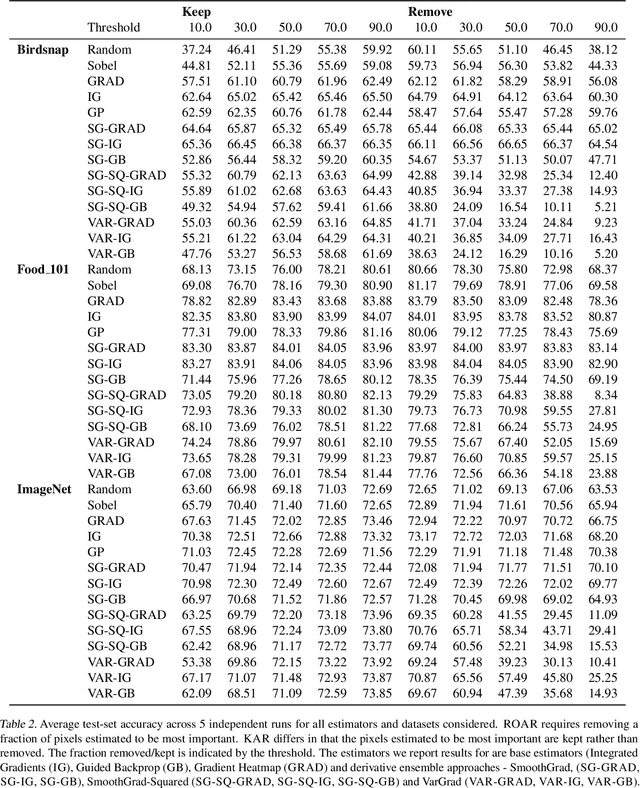
Estimating the influence of a given feature to a model prediction is challenging. We introduce ROAR, RemOve And Retrain, a benchmark to evaluate the accuracy of interpretability methods that estimate input feature importance in deep neural networks. We remove a fraction of input features deemed to be most important according to each estimator and measure the change to the model accuracy upon retraining. The most accurate estimator will identify inputs as important whose removal causes the most damage to model performance relative to all other estimators. This evaluation produces thought-provoking results -- we find that several estimators are less accurate than a random assignment of feature importance. However, averaging a set of squared noisy estimators (a variant of a technique proposed by Smilkov et al. (2017)), leads to significant gains in accuracy for each method considered and far outperforms such a random guess.