 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTime-series Imputation of Temporally-occluded Multiagent Trajectories
Jun 08, 2021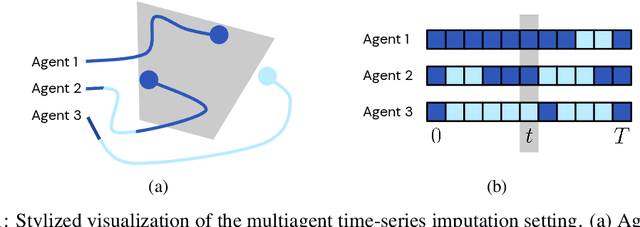
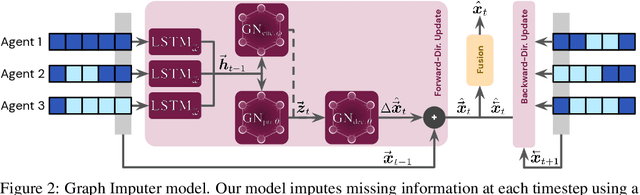
In multiagent environments, several decision-making individuals interact while adhering to the dynamics constraints imposed by the environment. These interactions, combined with the potential stochasticity of the agents' decision-making processes, make such systems complex and interesting to study from a dynamical perspective. Significant research has been conducted on learning models for forward-direction estimation of agent behaviors, for example, pedestrian predictions used for collision-avoidance in self-driving cars. However, in many settings, only sporadic observations of agents may be available in a given trajectory sequence. For instance, in football, subsets of players may come in and out of view of broadcast video footage, while unobserved players continue to interact off-screen. In this paper, we study the problem of multiagent time-series imputation, where available past and future observations of subsets of agents are used to estimate missing observations for other agents. Our approach, called the Graph Imputer, uses forward- and backward-information in combination with graph networks and variational autoencoders to enable learning of a distribution of imputed trajectories. We evaluate our approach on a dataset of football matches, using a projective camera module to train and evaluate our model for the off-screen player state estimation setting. We illustrate that our method outperforms several state-of-the-art approaches, including those hand-crafted for football.
From Motor Control to Team Play in Simulated Humanoid Football
May 25, 2021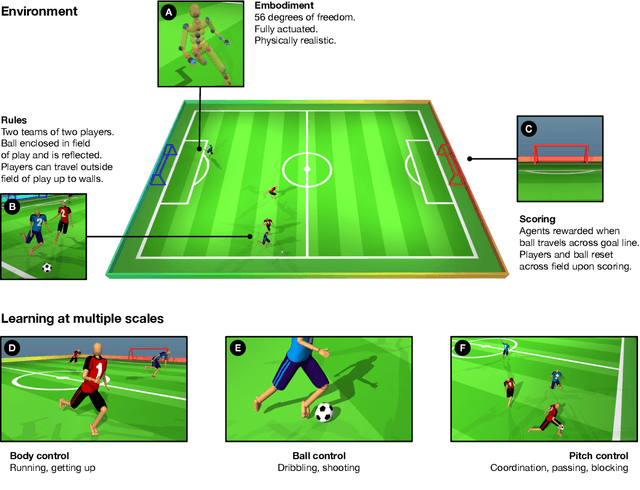
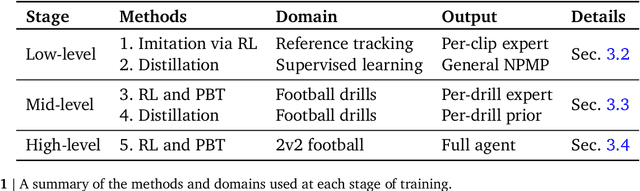
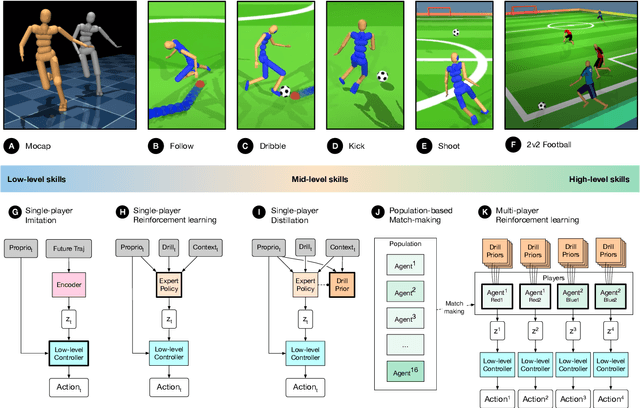
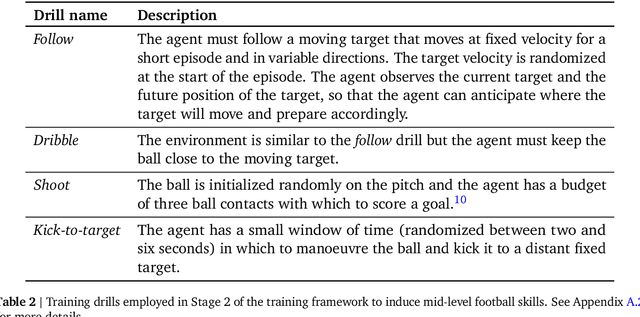
Intelligent behaviour in the physical world exhibits structure at multiple spatial and temporal scales. Although movements are ultimately executed at the level of instantaneous muscle tensions or joint torques, they must be selected to serve goals defined on much longer timescales, and in terms of relations that extend far beyond the body itself, ultimately involving coordination with other agents. Recent research in artificial intelligence has shown the promise of learning-based approaches to the respective problems of complex movement, longer-term planning and multi-agent coordination. However, there is limited research aimed at their integration. We study this problem by training teams of physically simulated humanoid avatars to play football in a realistic virtual environment. We develop a method that combines imitation learning, single- and multi-agent reinforcement learning and population-based training, and makes use of transferable representations of behaviour for decision making at different levels of abstraction. In a sequence of stages, players first learn to control a fully articulated body to perform realistic, human-like movements such as running and turning; they then acquire mid-level football skills such as dribbling and shooting; finally, they develop awareness of others and play as a team, bridging the gap between low-level motor control at a timescale of milliseconds, and coordinated goal-directed behaviour as a team at the timescale of tens of seconds. We investigate the emergence of behaviours at different levels of abstraction, as well as the representations that underlie these behaviours using several analysis techniques, including statistics from real-world sports analytics. Our work constitutes a complete demonstration of integrated decision-making at multiple scales in a physically embodied multi-agent setting. See project video at https://youtu.be/KHMwq9pv7mg.
Game Plan: What AI can do for Football, and What Football can do for AI
Nov 18, 2020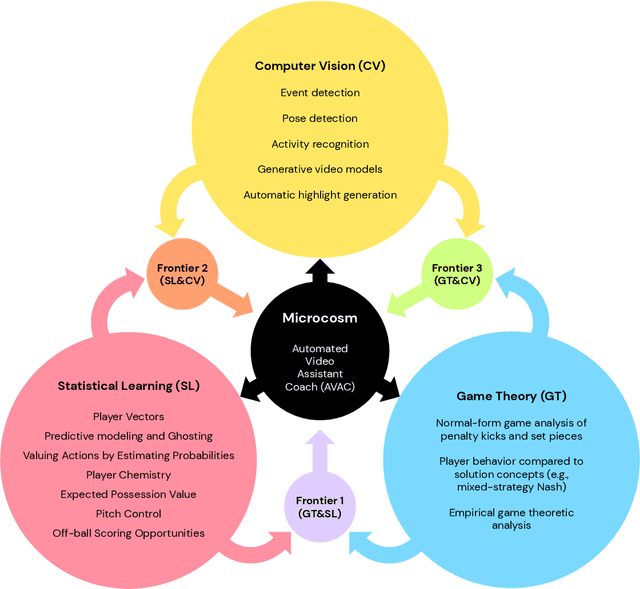
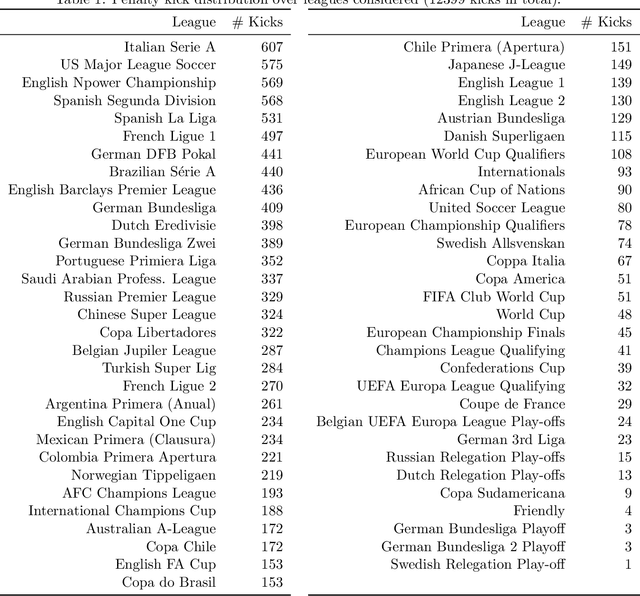

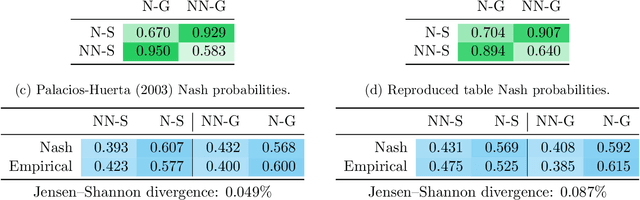
The rapid progress in artificial intelligence (AI) and machine learning has opened unprecedented analytics possibilities in various team and individual sports, including baseball, basketball, and tennis. More recently, AI techniques have been applied to football, due to a huge increase in data collection by professional teams, increased computational power, and advances in machine learning, with the goal of better addressing new scientific challenges involved in the analysis of both individual players' and coordinated teams' behaviors. The research challenges associated with predictive and prescriptive football analytics require new developments and progress at the intersection of statistical learning, game theory, and computer vision. In this paper, we provide an overarching perspective highlighting how the combination of these fields, in particular, forms a unique microcosm for AI research, while offering mutual benefits for professional teams, spectators, and broadcasters in the years to come. We illustrate that this duality makes football analytics a game changer of tremendous value, in terms of not only changing the game of football itself, but also in terms of what this domain can mean for the field of AI. We review the state-of-the-art and exemplify the types of analysis enabled by combining the aforementioned fields, including illustrative examples of counterfactual analysis using predictive models, and the combination of game-theoretic analysis of penalty kicks with statistical learning of player attributes. We conclude by highlighting envisioned downstream impacts, including possibilities for extensions to other sports (real and virtual).
Navigating the Landscape of Games
May 04, 2020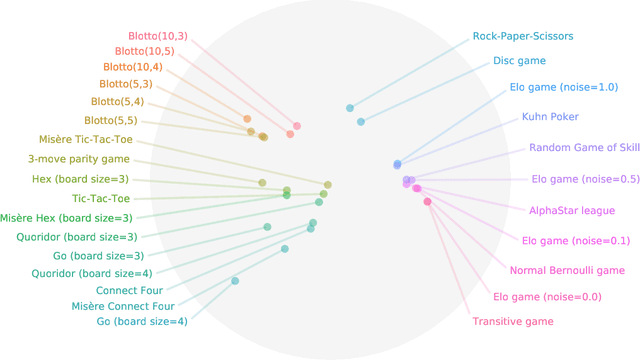
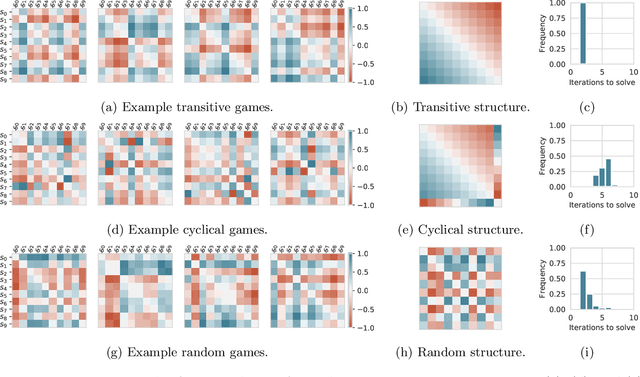
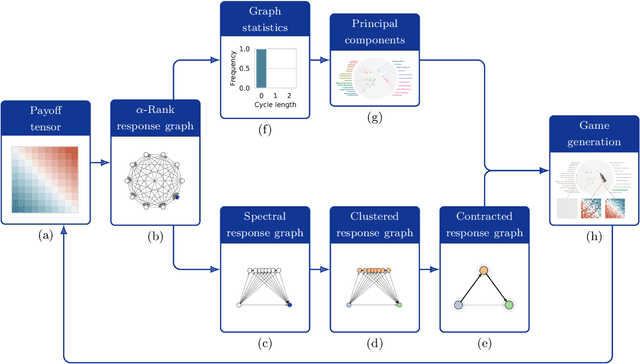

Games are traditionally recognized as one of the key testbeds underlying progress in artificial intelligence (AI), aptly referred to as the "Drosophila of AI". Traditionally, researchers have focused on using games to build strong AI agents that, e.g., achieve human-level performance. This progress, however, also requires a classification of how 'interesting' a game is for an artificial agent. Tackling this latter question not only facilitates an understanding of the characteristics of learnt AI agents in games, but also helps to determine what game an AI should address next as part of its training. Here, we show how network measures applied to so-called response graphs of large-scale games enable the creation of a useful landscape of games, quantifying the relationships between games of widely varying sizes, characteristics, and complexities. We illustrate our findings in various domains, ranging from well-studied canonical games to significantly more complex empirical games capturing the performance of trained AI agents pitted against one another. Our results culminate in a demonstration of how one can leverage this information to automatically generate new and interesting games, including mixtures of empirical games synthesized from real world games.
OpenSpiel: A Framework for Reinforcement Learning in Games
Oct 10, 2019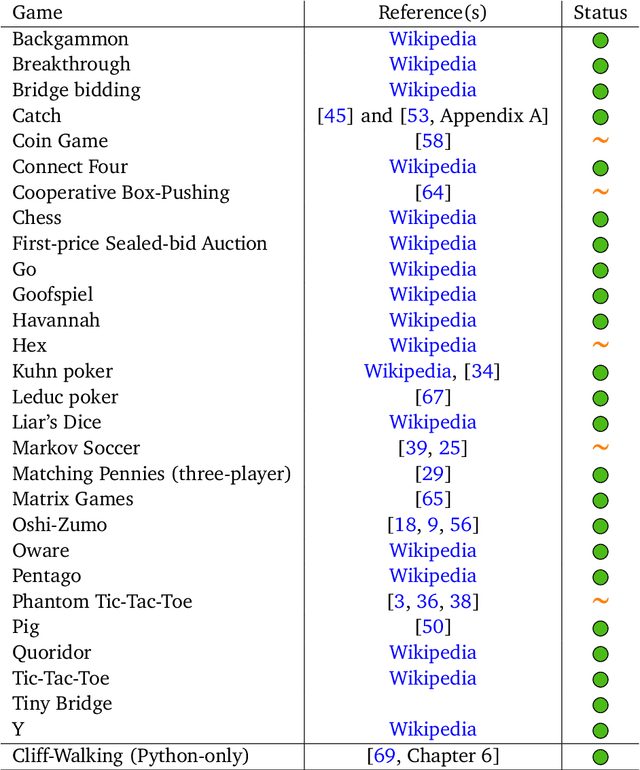
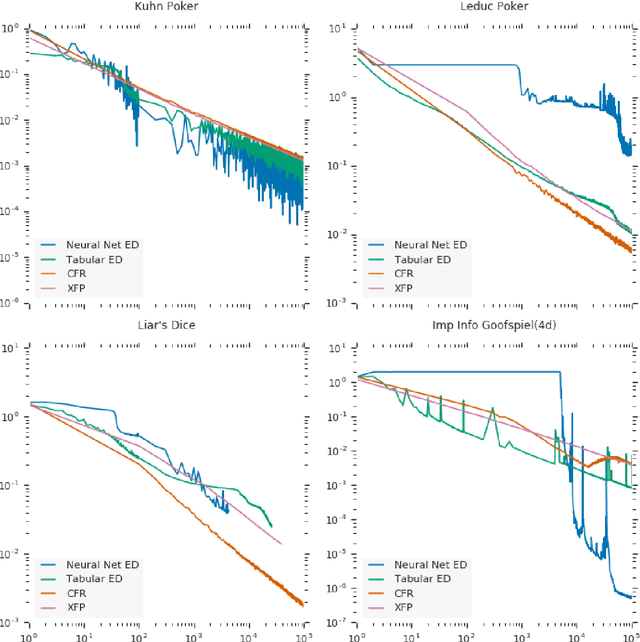
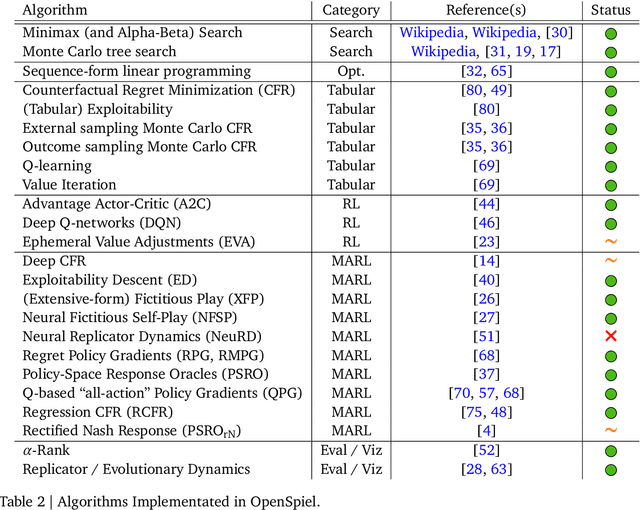
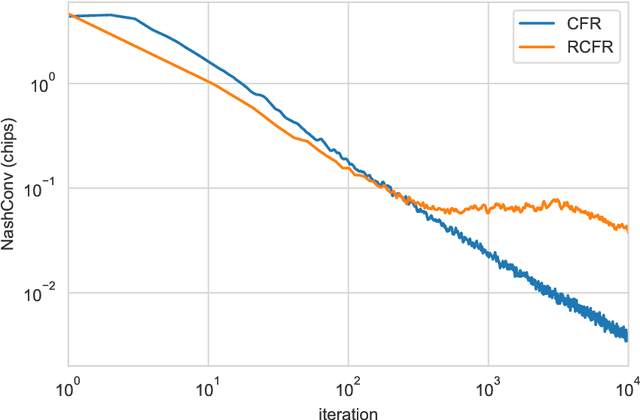
OpenSpiel is a collection of environments and algorithms for research in general reinforcement learning and search/planning in games. OpenSpiel supports n-player (single- and multi- agent) zero-sum, cooperative and general-sum, one-shot and sequential, strictly turn-taking and simultaneous-move, perfect and imperfect information games, as well as traditional multiagent environments such as (partially- and fully- observable) grid worlds and social dilemmas. OpenSpiel also includes tools to analyze learning dynamics and other common evaluation metrics. This document serves both as an overview of the code base and an introduction to the terminology, core concepts, and algorithms across the fields of reinforcement learning, computational game theory, and search.
A Generalized Training Approach for Multiagent Learning
Sep 27, 2019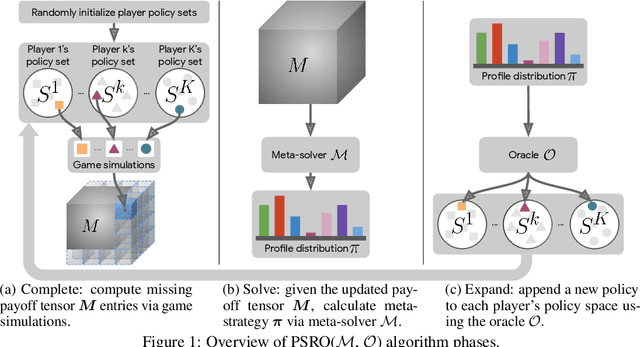
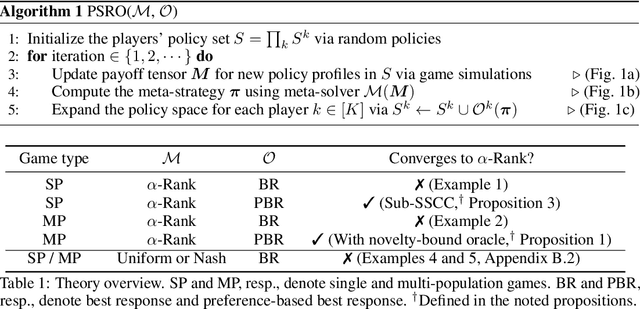
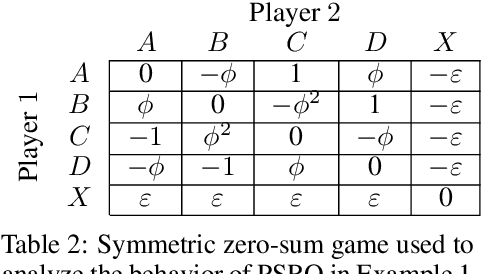
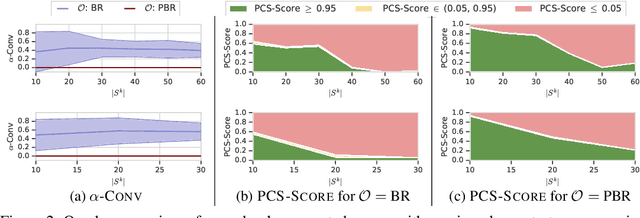
This paper investigates a population-based training regime based on game-theoretic principles called Policy-Spaced Response Oracles (PSRO). PSRO is general in the sense that it (1) encompasses well-known algorithms such as fictitious play and double oracle as special cases, and (2) in principle applies to general-sum, many-player games. Despite this, prior studies of PSRO have been focused on two-player zero-sum games, a regime wherein Nash equilibria are tractably computable. In moving from two-player zero-sum games to more general settings, computation of Nash equilibria quickly becomes infeasible. Here, we extend the theoretical underpinnings of PSRO by considering an alternative solution concept, {\alpha}-Rank, which is unique (thus faces no equilibrium selection issues, unlike Nash) and tractable to compute in general-sum, many-player settings. We establish convergence guarantees in several games classes, and identify links between Nash equilibria and {\alpha}-Rank. We demonstrate the competitive performance of {\alpha}-Rank-based PSRO against an exact Nash solver-based PSRO in 2-player Kuhn and Leduc Poker. We then go beyond the reach of prior PSRO applications by considering 3- to 5-player poker games, yielding instances where {\alpha}-Rank achieves faster convergence than approximate Nash solvers, thus establishing it as a favorable general games solver. We also carry out an initial empirical validation in MuJoCo soccer, illustrating the feasibility of the proposed approach in another complex domain.
Neural Replicator Dynamics
Jun 01, 2019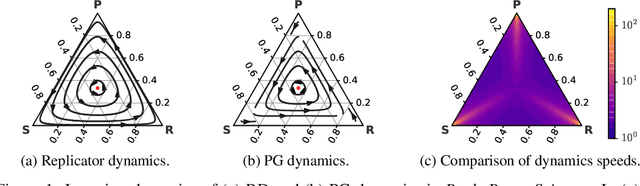
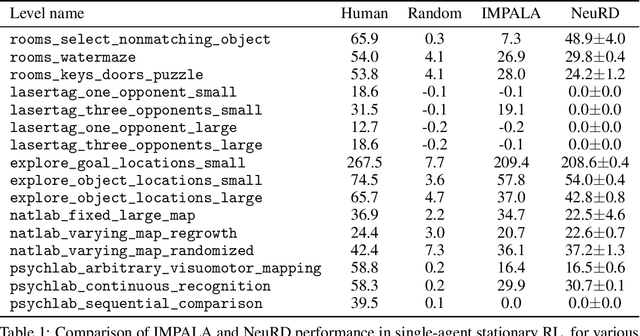
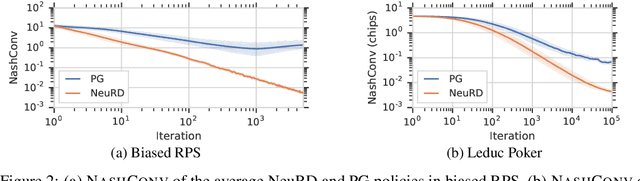
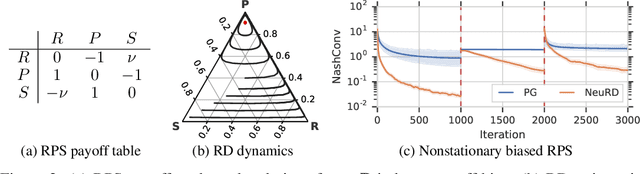
In multiagent learning, agents interact in inherently nonstationary environments due to their concurrent policy updates. It is, therefore, paramount to develop and analyze algorithms that learn effectively despite these nonstationarities. A number of works have successfully conducted this analysis under the lens of evolutionary game theory (EGT), wherein a population of individuals interact and evolve based on biologically-inspired operators. These studies have mainly focused on establishing connections to value-iteration based approaches in stateless or tabular games. We extend this line of inquiry to formally establish links between EGT and policy gradient (PG) methods, which have been extensively applied in single and multiagent learning. We pinpoint weaknesses of the commonly-used softmax PG algorithm in adversarial and nonstationary settings and contrast PG's behavior to that predicted by replicator dynamics (RD), a central model in EGT. We consequently provide theoretical results that establish links between EGT and PG methods, then derive Neural Replicator Dynamics (NeuRD), a parameterized version of RD that constitutes a novel method with several advantages. First, as NeuRD reduces to the well-studied no-regret Hedge algorithm in the tabular setting, it inherits no-regret guarantees that enable convergence to equilibria in games. Second, NeuRD is shown to be more adaptive to nonstationarity, in comparison to PG, when learning in canonical games and imperfect information benchmarks including Poker. Thirdly, modifying any PG-based algorithm to use the NeuRD update rule is straightforward and incurs no added computational costs. Finally, while single-agent learning is not the main focus of the paper, we verify empirically that NeuRD is competitive in these settings with a recent baseline algorithm.
Persistent self-supervised learning principle: from stereo to monocular vision for obstacle avoidance
Mar 25, 2016
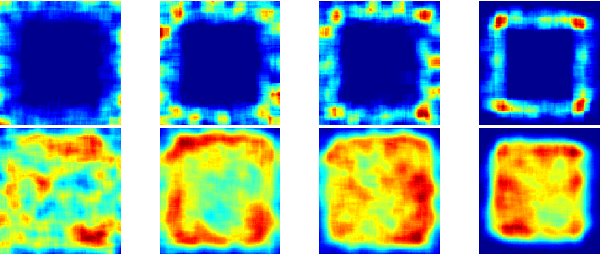
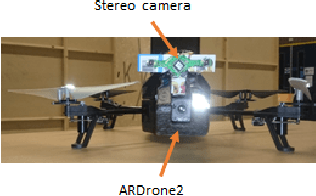
Self-Supervised Learning (SSL) is a reliable learning mechanism in which a robot uses an original, trusted sensor cue for training to recognize an additional, complementary sensor cue. We study for the first time in SSL how a robot's learning behavior should be organized, so that the robot can keep performing its task in the case that the original cue becomes unavailable. We study this persistent form of SSL in the context of a flying robot that has to avoid obstacles based on distance estimates from the visual cue of stereo vision. Over time it will learn to also estimate distances based on monocular appearance cues. A strategy is introduced that has the robot switch from stereo vision based flight to monocular flight, with stereo vision purely used as 'training wheels' to avoid imminent collisions. This strategy is shown to be an effective approach to the 'feedback-induced data bias' problem as also experienced in learning from demonstration. Both simulations and real-world experiments with a stereo vision equipped AR drone 2.0 show the feasibility of this approach, with the robot successfully using monocular vision to avoid obstacles in a 5 x 5 room. The experiments show the potential of persistent SSL as a robust learning approach to enhance the capabilities of robots. Moreover, the abundant training data coming from the own sensors allows to gather large data sets necessary for deep learning approaches.