 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBodies Uncovered: Learning to Manipulate Real Blankets Around People via Physics Simulations
Sep 10, 2021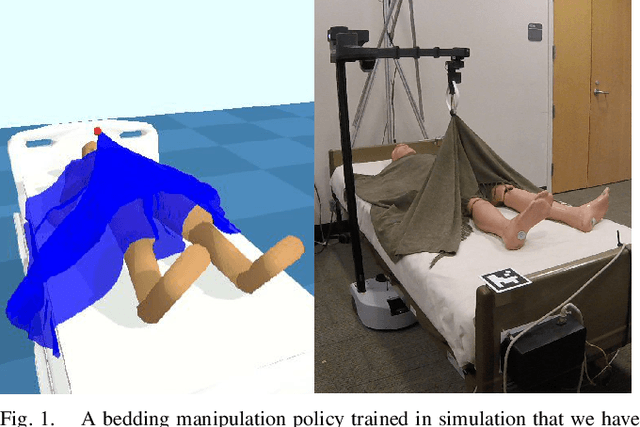
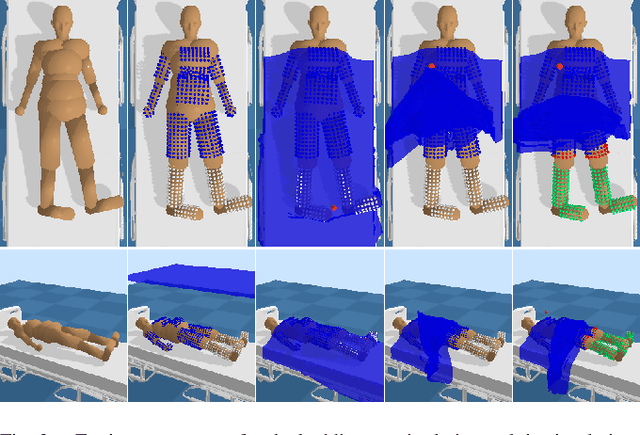
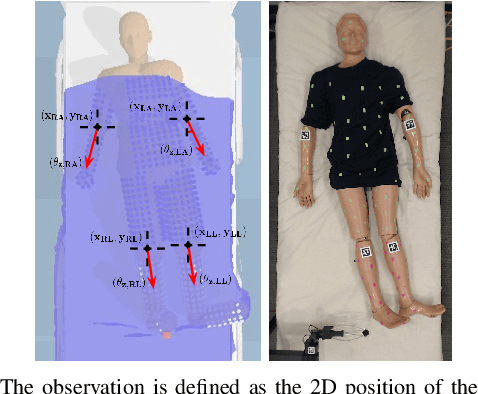
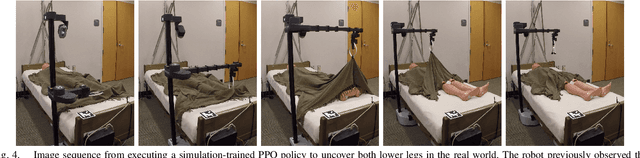
While robots present an opportunity to provide physical assistance to older adults and people with mobility impairments in bed, people frequently rest in bed with blankets that cover the majority of their body. To provide assistance for many daily self-care tasks, such as bathing, dressing, or ambulating, a caregiver must first uncover blankets from part of a person's body. In this work, we introduce a formulation for robotic bedding manipulation around people in which a robot uncovers a blanket from a target body part while ensuring the rest of the human body remains covered. We compare both reinforcement and supervised learning approaches for optimizing policies which provide a robot with grasp and release points that uncover a target part of the body. We trained and conducted evaluations of these policies in physics simulation environments that consist of a deformable cloth mesh covering a simulated human lying supine on a bed. In addition, we transfer simulation-trained policies to a real mobile manipulator and demonstrate that it can uncover a blanket from target body parts of a manikin lying in bed. Source code is available online.
Characterizing Multidimensional Capacitive Servoing for Physical Human-Robot Interaction
May 25, 2021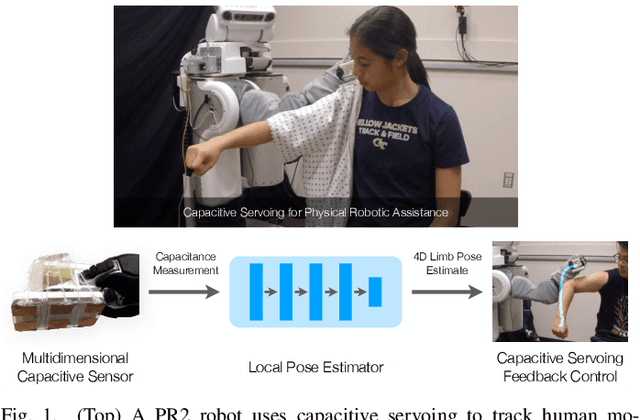
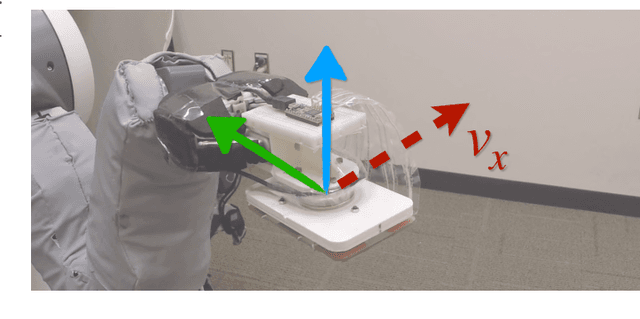
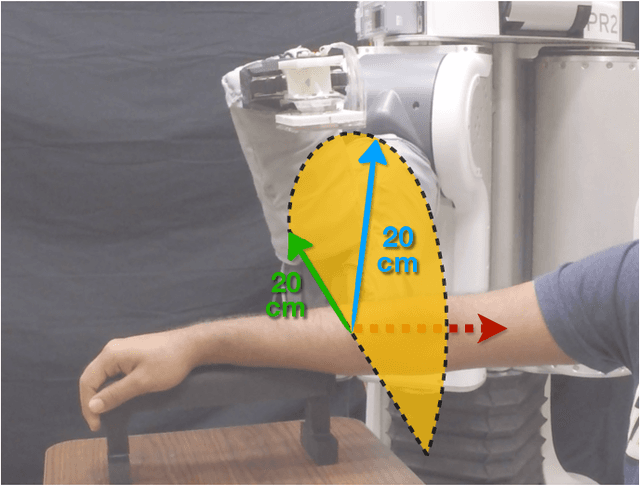
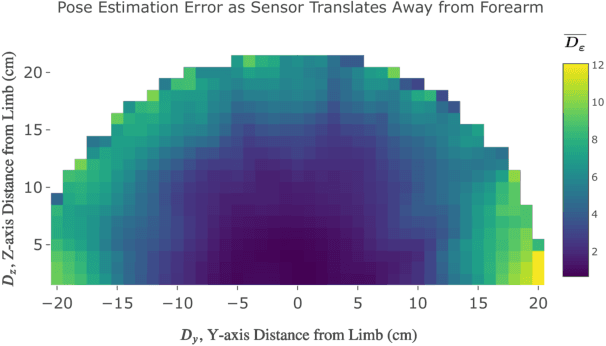
Towards the goal of robots performing robust and intelligent physical interactions with people, it is crucial that robots are able to accurately sense the human body, follow trajectories around the body, and track human motion. This study introduces a capacitive servoing control scheme that allows a robot to sense and navigate around human limbs during close physical interactions. Capacitive servoing leverages temporal measurements from a multi-electrode capacitive sensor array mounted on a robot's end effector to estimate the relative position and orientation (pose) of a nearby human limb. Capacitive servoing then uses these human pose estimates from a data-driven pose estimator within a feedback control loop in order to maneuver the robot's end effector around the surface of a human limb. We provide a design overview of capacitive sensors for human-robot interaction and then investigate the performance and generalization of capacitive servoing through an experiment with 12 human participants. The results indicate that multidimensional capacitive servoing enables a robot's end effector to move proximally or distally along human limbs while adapting to human pose. Using a cross-validation experiment, results further show that capacitive servoing generalizes well across people with different body size.
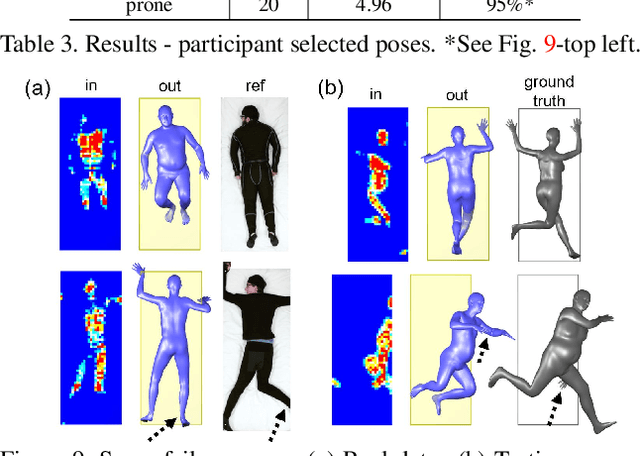
BodyPressure -- Inferring Body Pose and Contact Pressure from a Depth Image
May 20, 2021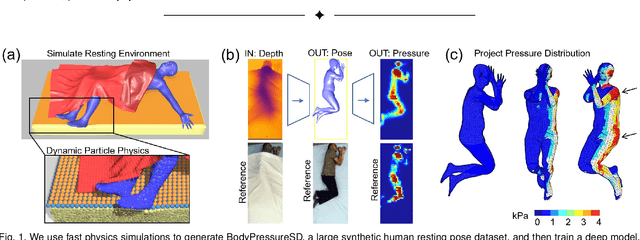
Contact pressure between the human body and its surroundings has important implications. For example, it plays a role in comfort, safety, posture, and health. We present a method that infers contact pressure between a human body and a mattress from a depth image. Specifically, we focus on using a depth image from a downward facing camera to infer pressure on a body at rest in bed occluded by bedding, which is directly applicable to the prevention of pressure injuries in healthcare. Our approach involves augmenting a real dataset with synthetic data generated via a soft-body physics simulation of a human body, a mattress, a pressure sensing mat, and a blanket. We introduce a novel deep network that we trained on an augmented dataset and evaluated with real data. The network contains an embedded human body mesh model and uses a white-box model of depth and pressure image generation. Our network successfully infers body pose, outperforming prior work. It also infers contact pressure across a 3D mesh model of the human body, which is a novel capability, and does so in the presence of occlusion from blankets.
ContactOpt: Optimizing Contact to Improve Grasps
Apr 15, 2021
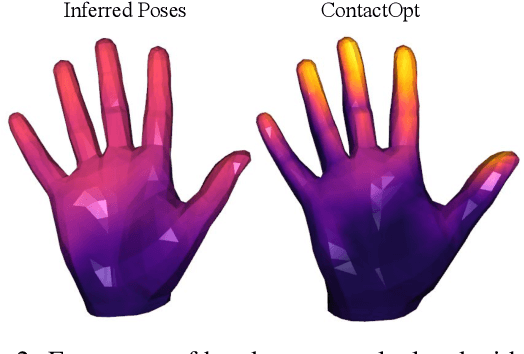
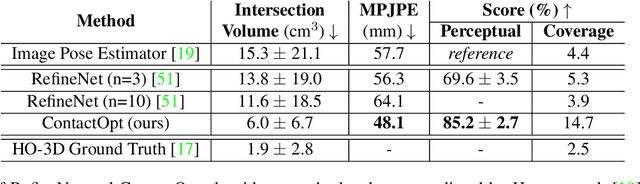
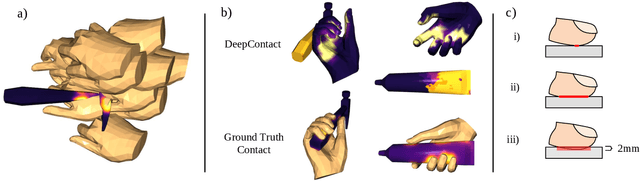
Physical contact between hands and objects plays a critical role in human grasps. We show that optimizing the pose of a hand to achieve expected contact with an object can improve hand poses inferred via image-based methods. Given a hand mesh and an object mesh, a deep model trained on ground truth contact data infers desirable contact across the surfaces of the meshes. Then, ContactOpt efficiently optimizes the pose of the hand to achieve desirable contact using a differentiable contact model. Notably, our contact model encourages mesh interpenetration to approximate deformable soft tissue in the hand. In our evaluations, our methods result in grasps that better match ground truth contact, have lower kinematic error, and are significantly preferred by human participants. Code and models are available online.
Learning to Manipulate Amorphous Materials
Mar 03, 2021
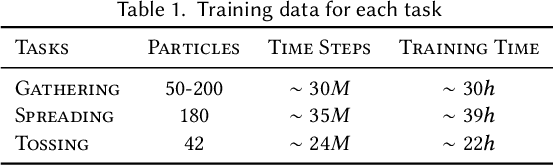
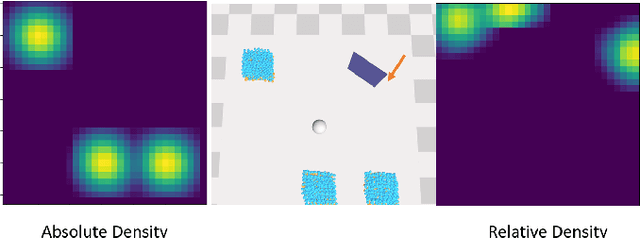
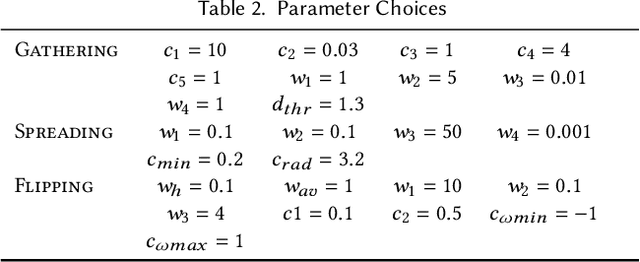
We present a method of training character manipulation of amorphous materials such as those often used in cooking. Common examples of amorphous materials include granular materials (salt, uncooked rice), fluids (honey), and visco-plastic materials (sticky rice, softened butter). A typical task is to spread a given material out across a flat surface using a tool such as a scraper or knife. We use reinforcement learning to train our controllers to manipulate materials in various ways. The training is performed in a physics simulator that uses position-based dynamics of particles to simulate the materials to be manipulated. The neural network control policy is given observations of the material (e.g. a low-resolution density map), and the policy outputs actions such as rotating and translating the knife. We demonstrate policies that have been successfully trained to carry out the following tasks: spreading, gathering, and flipping. We produce a final animation by using inverse kinematics to guide a character's arm and hand to match the motion of the manipulation tool such as a knife or a frying pan.
Material Recognition via Heat Transfer Given Ambiguous Initial Conditions
Dec 03, 2020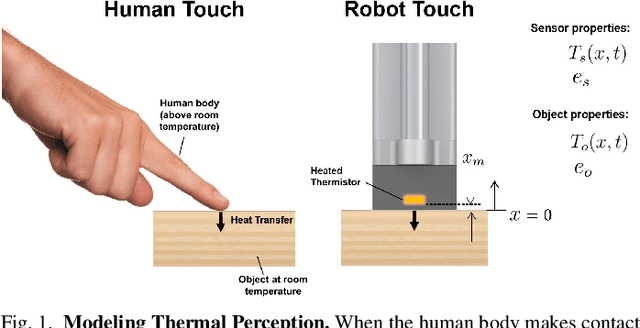
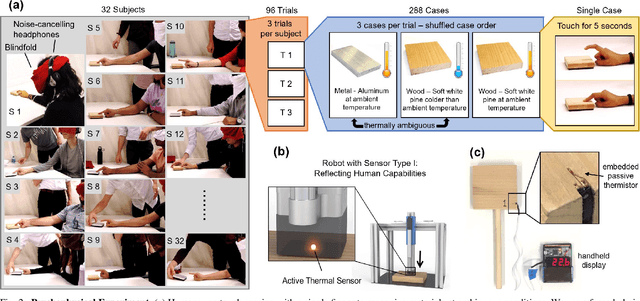
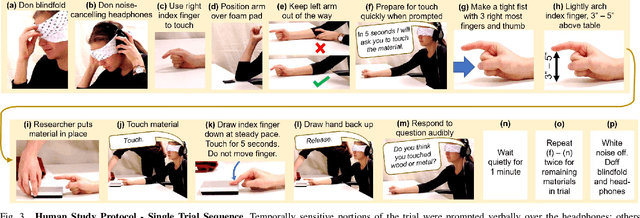
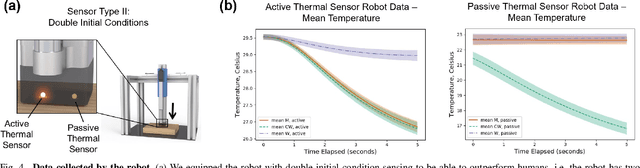
Humans and robots can recognize materials with distinct thermal effusivities by making physical contact and observing temperatures during heat transfer. This works well with room temperature materials and humans and robots at human body temperatures. Past research has shown that cooling or heating a material can result in temperatures that are similar to contact with another material. To thoroughly investigate this perceptual ambiguity, we designed a psychophysical experiment in which a participant discriminates between two materials given ambiguous initial conditions. We conducted a study with 32 human participants and a robot. Humans and the robot confused the materials. We also found that robots can overcome this ambiguity using two temperature sensors with different temperatures prior to contact. We support this conclusion based on a mathematical proof using a heat transfer model and empirical results in which a robot achieved 100% accuracy compared to 5% human accuracy. Our results also indicate that robots can use subtle cues to distinguish thermally ambiguous materials with a single temperature sensor. Overall, our work provides insights into challenging conditions for material recognition via heat transfer, and suggests methods by which robots can overcome these challenges to outperform humans.
ContactPose: A Dataset of Grasps with Object Contact and Hand Pose
Jul 19, 2020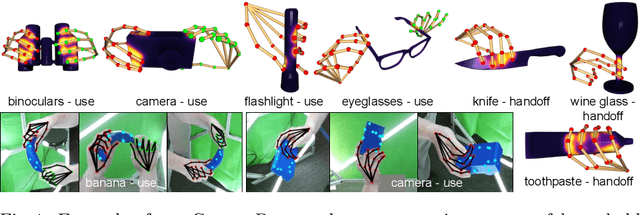
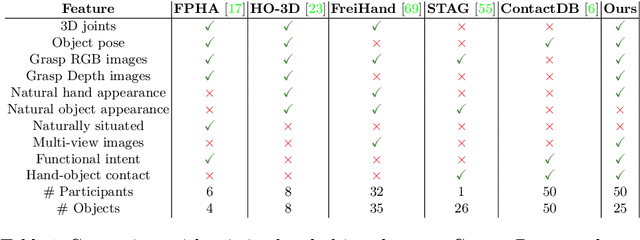
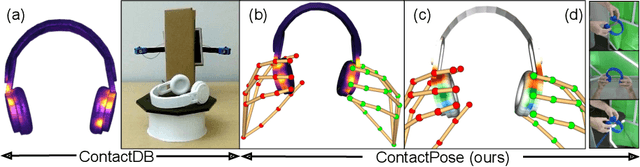
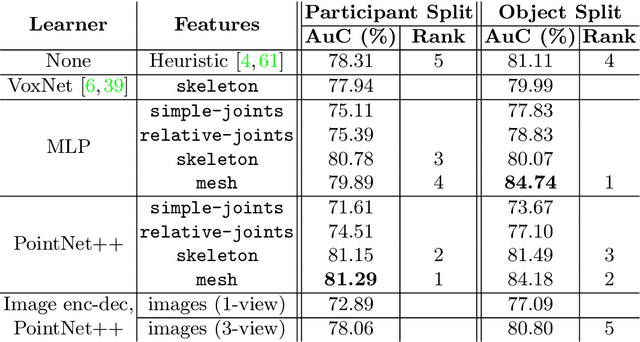
Grasping is natural for humans. However, it involves complex hand configurations and soft tissue deformation that can result in complicated regions of contact between the hand and the object. Understanding and modeling this contact can potentially improve hand models, AR/VR experiences, and robotic grasping. Yet, we currently lack datasets of hand-object contact paired with other data modalities, which is crucial for developing and evaluating contact modeling techniques. We introduce ContactPose, the first dataset of hand-object contact paired with hand pose, object pose, and RGB-D images. ContactPose has 2306 unique grasps of 25 household objects grasped with 2 functional intents by 50 participants, and more than 2.9 M RGB-D grasp images. Analysis of ContactPose data reveals interesting relationships between hand pose and contact. We use this data to rigorously evaluate various data representations, heuristics from the literature, and learning methods for contact modeling. Data, code, and trained models are available at https://contactpose.cc.gatech.edu.
Assistive VR Gym: Using Interactions with Real People to Improve Virtual Assistive Robots
Jul 09, 2020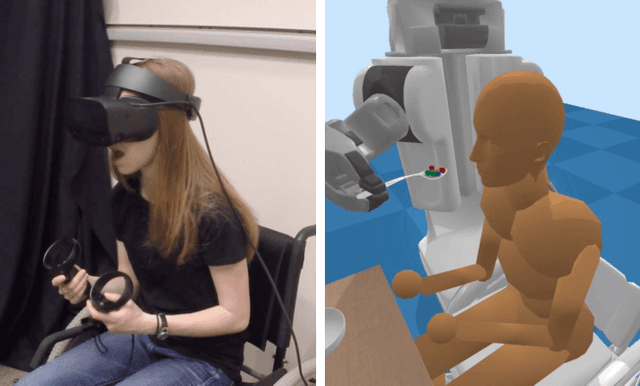

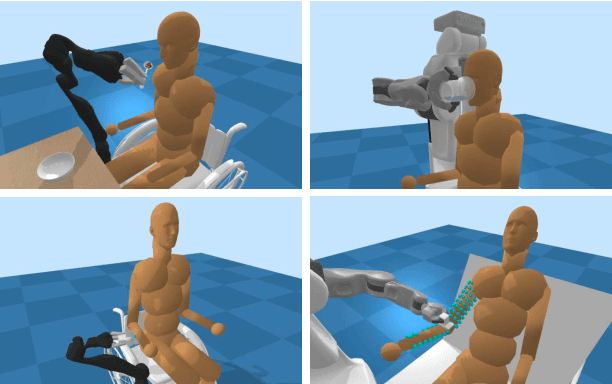
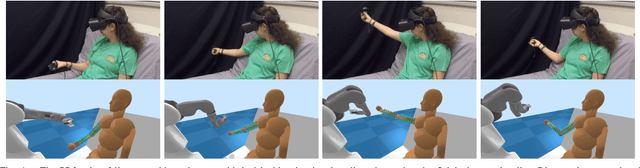
Versatile robotic caregivers could benefit millions of people worldwide, including older adults and people with disabilities. Recent work has explored how robotic caregivers can learn to interact with people through physics simulations, yet transferring what has been learned to real robots remains challenging. Virtual reality (VR) has the potential to help bridge the gap between simulations and the real world. We present Assistive VR Gym (AVR Gym), which enables real people to interact with virtual assistive robots. We also provide evidence that AVR Gym can help researchers improve the performance of simulation-trained assistive robots with real people. Prior to AVR Gym, we trained robot control policies (Original Policies) solely in simulation for four robotic caregiving tasks (robot-assisted feeding, drinking, itch scratching, and bed bathing) with two simulated robots (PR2 from Willow Garage and Jaco from Kinova). With AVR Gym, we developed Revised Policies based on insights gained from testing the Original policies with real people. Through a formal study with eight participants in AVR Gym, we found that the Original policies performed poorly, the Revised policies performed significantly better, and that improvements to the biomechanical models used to train the Revised policies resulted in simulated people that better match real participants. Notably, participants significantly disagreed that the Original policies were successful at assistance, but significantly agreed that the Revised policies were successful at assistance. Overall, our results suggest that VR can be used to improve the performance of simulation-trained control policies with real people without putting people at risk, thereby serving as a valuable stepping stone to real robotic assistance.
Bodies at Rest: 3D Human Pose and Shape Estimation from a Pressure Image using Synthetic Data
Apr 02, 2020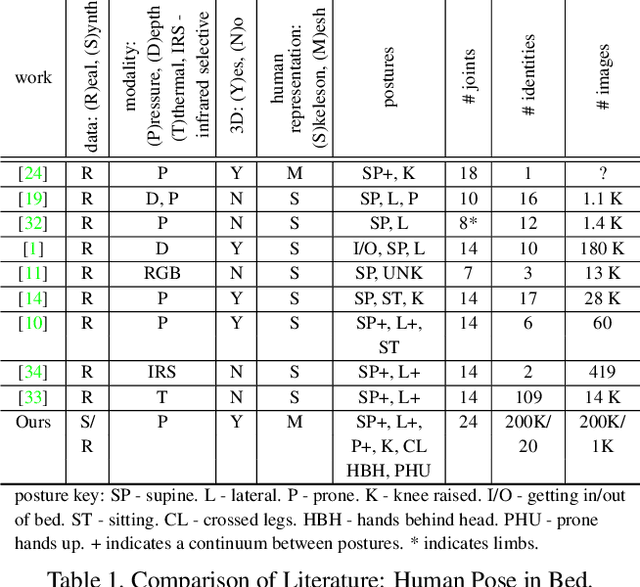
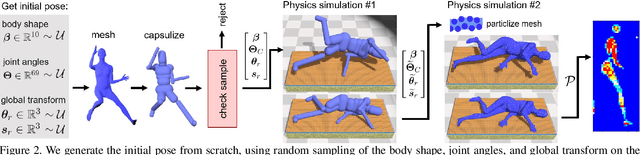
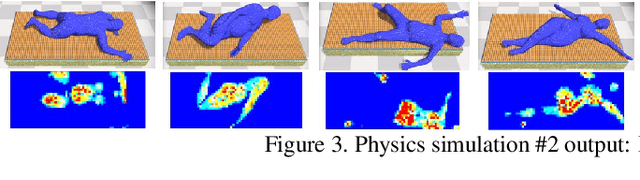
People spend a substantial part of their lives at rest in bed. 3D human pose and shape estimation for this activity would have numerous beneficial applications, yet line-of-sight perception is complicated by occlusion from bedding. Pressure sensing mats are a promising alternative, but training data is challenging to collect at scale. We describe a physics-based method that simulates human bodies at rest in a bed with a pressure sensing mat, and present PressurePose, a synthetic dataset with 206K pressure images with 3D human poses and shapes. We also present PressureNet, a deep learning model that estimates human pose and shape given a pressure image and gender. PressureNet incorporates a pressure map reconstruction (PMR) network that models pressure image generation to promote consistency between estimated 3D body models and pressure image input. In our evaluations, PressureNet performed well with real data from participants in diverse poses, even though it had only been trained with synthetic data. When we ablated the PMR network, performance dropped substantially.
Multimodal Material Classification for Robots using Spectroscopy and High Resolution Texture Imaging
Apr 02, 2020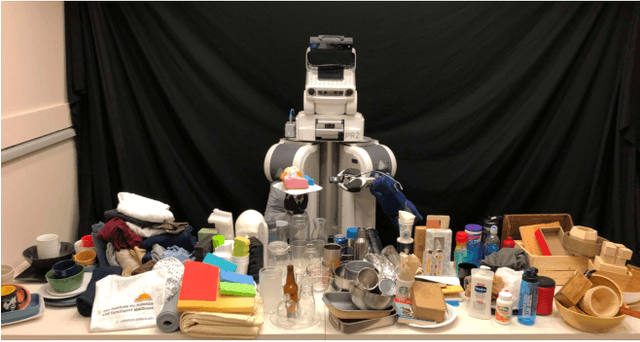
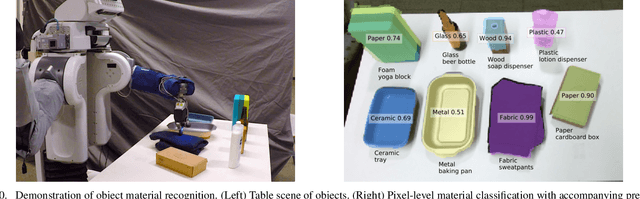
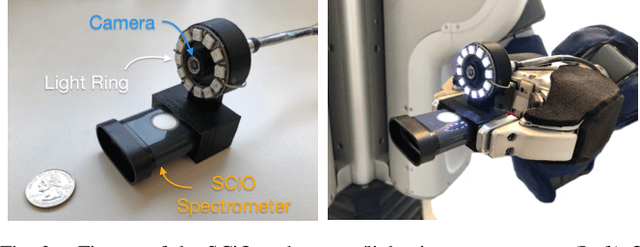
Material recognition can help inform robots about how to properly interact with and manipulate real-world objects. In this paper, we present a multimodal sensing technique, leveraging near-infrared spectroscopy and close-range high resolution texture imaging, that enables robots to estimate the materials of household objects. We release a dataset of high resolution texture images and spectral measurements collected from a mobile manipulator that interacted with 144 household objects. We then present a neural network architecture that learns a compact multimodal representation of spectral measurements and texture images. When generalizing material classification to new objects, we show that this multimodal representation enables a robot to recognize materials with greater performance as compared to prior state-of-the-art approaches. Finally, we present how a robot can combine this high resolution local sensing with images from the robot's head-mounted camera to achieve accurate material classification over a scene of objects on a table.