 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeControl Without Control: Defining Implicit Interaction Paradigms for Autonomous Assistive Robots
Mar 30, 2026Assistive robotic systems have shown growing potential to improve the quality of life of those with disabilities. As researchers explore the automation of various caregiving tasks, considerations for how the technology can still preserve the user's sense of control become paramount to ensuring that robotic systems are aligned with fundamental user needs and motivations. In this work, we present two previously developed systems as design cases through which to explore an interaction paradigm that we call implicit control, where the behavior of an autonomous robot is modified based on users' natural behavioral cues, instead of some direct input. Our selected design cases, unlike systems in past work, specifically probe users' perception of the interaction. We find, from a new thematic analysis of qualitative feedback on both cases, that designing for effective implicit control enables both a reduction in perceived workload and the preservation of the users' sense of control through the system's intuitiveness and responsiveness, contextual awareness, and ability to adapt to preferences. We further derive a set of core guidelines for designers in deciding when and how to apply implicit interaction paradigms for their assistive applications.
Strategic Jenga Play via Graph Based Dynamics Modeling
May 14, 2025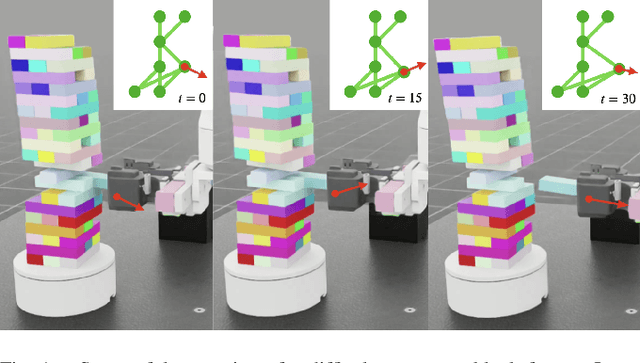
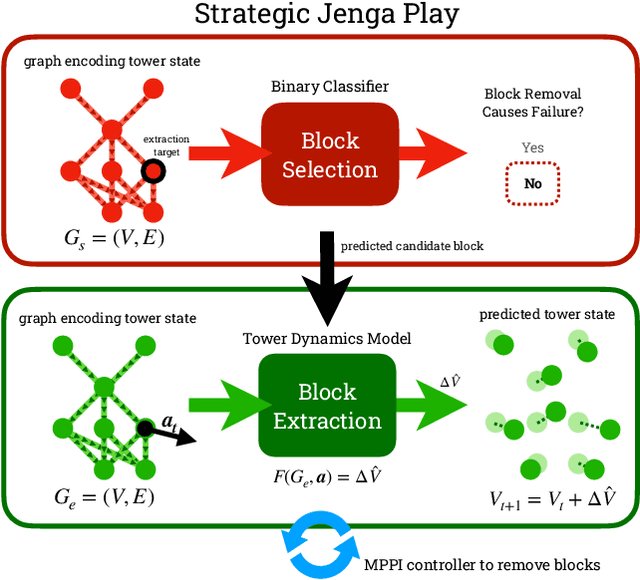
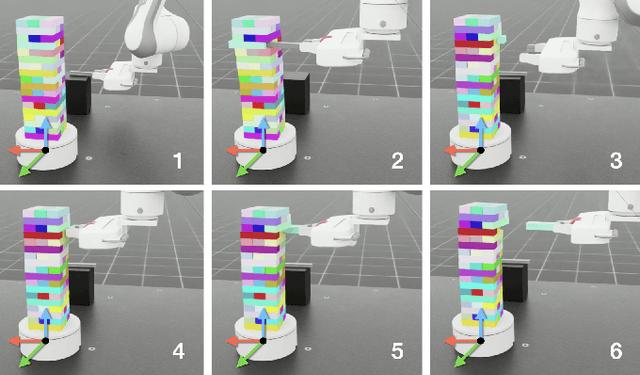
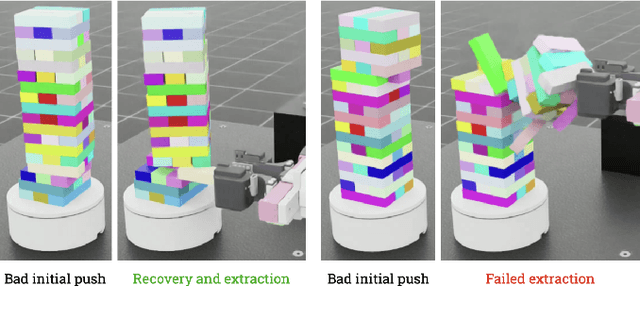
Controlled manipulation of multiple objects whose dynamics are closely linked is a challenging problem within contact-rich manipulation, requiring an understanding of how the movement of one will impact the others. Using the Jenga game as a testbed to explore this problem, we graph-based modeling to tackle two different aspects of the task: 1) block selection and 2) block extraction. For block selection, we construct graphs of the Jenga tower and attempt to classify, based on the tower's structure, whether removing a given block will cause the tower to collapse. For block extraction, we train a dynamics model that predicts how all the blocks in the tower will move at each timestep in an extraction trajectory, which we then use in a sampling-based model predictive control loop to safely pull blocks out of the tower with a general-purpose parallel-jaw gripper. We train and evaluate our methods in simulation, demonstrating promising results towards block selection and block extraction on a challenging set of full-sized Jenga towers, even at advanced stages of the game.
Do Mistakes Matter? Comparing Trust Responses of Different Age Groups to Errors Made by Physically Assistive Robots
Aug 23, 2024



Trust is a key factor in ensuring acceptable human-robot interaction, especially in settings where robots may be assisting with critical activities of daily living. When practically deployed, robots are bound to make occasional mistakes, yet the degree to which these errors will impact a care recipient's trust in the robot, especially in performing physically assistive tasks, remains an open question. To investigate this, we conducted experiments where participants interacted with physically assistive robots which would occasionally make intentional mistakes while performing two different tasks: bathing and feeding. Our study considered the error response of two populations: younger adults at a university (median age 26) and older adults at an independent living facility (median age 83). We observed that the impact of errors on a users' trust in the robot depends on both their age and the task that the robot is performing. We also found that older adults tend to evaluate the robot on factors unrelated to the robot's performance, making their trust in the system more resilient to errors when compared to younger adults. Code and supplementary materials are available on our project webpage.
RoboCAP: Robotic Classification and Precision Pouring of Diverse Liquids and Granular Media with Capacitive Sensing
May 13, 2024



Liquids and granular media are pervasive throughout human environments, yet remain particularly challenging for robots to sense and manipulate precisely. In this work, we present a systematic approach at integrating capacitive sensing within robotic end effectors to enable robust sensing and precise manipulation of liquids and granular media. We introduce the parallel-jaw RoboCAP Gripper with embedded capacitive sensing arrays that enable a robot to directly sense the materials and dynamics of liquids inside of diverse containers, including some visually opaque. When coupled with model-based control, we demonstrate that the proposed system enables a robotic manipulator to achieve state-of-the-art precision pouring accuracy for a range of substances with varying dynamics properties. Code, designs, and build details are available on the project website.
SkinGrip: An Adaptive Soft Robotic Manipulator with Capacitive Sensing for Whole-Limb Bathing Assistance
May 04, 2024



Robotics presents a promising opportunity for enhancing bathing assistance, potentially to alleviate labor shortages and reduce care costs, while offering consistent and gentle care for individuals with physical disabilities. However, ensuring flexible and efficient cleaning of the human body poses challenges as it involves direct physical contact between the human and the robot, and necessitates simple, safe, and effective control. In this paper, we introduce a soft, expandable robotic manipulator with embedded capacitive proximity sensing arrays, designed for safe and efficient bathing assistance. We conduct a thorough evaluation of our soft manipulator, comparing it with a baseline rigid end effector in a human study involving 12 participants across $96$ bathing trails. Our soft manipulator achieves an an average cleaning effectiveness of 88.8% on arms and 81.4% on legs, far exceeding the performance of the baseline. Participant feedback further validates the manipulator's ability to maintain safety, comfort, and thorough cleaning.
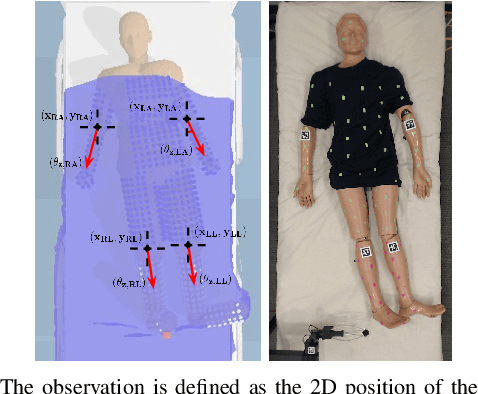
Robust Body Exposure : A Graph-based Dynamics Modeling Approach to Manipulating Blankets over People
Apr 10, 2023



Robotic caregivers could potentially improve the quality of life of many who require physical assistance. However, in order to assist individuals who are lying in bed, robots must be capable of dealing with a significant obstacle: the blanket or sheet that will almost always cover the person's body. We propose a method for targeted bedding manipulation over people lying supine in bed where we first learn a model of the cloth's dynamics. Then, we optimize over this model to uncover a given target limb using information about human body shape and pose that only needs to be provided at run-time. We show how this approach enables greater robustness to variation relative to geometric and reinforcement learning baselines via a number of generalization evaluations in simulation and in the real world. We further evaluate our approach in a human study with 12 participants where we demonstrate that a mobile manipulator can adapt to real variation in human body shape, size, pose, and blanket configuration to uncover target body parts without exposing the rest of the body. Source code and supplementary materials are available online.
SLURP! Spectroscopy of Liquids Using Robot Pre-Touch Sensing
Oct 10, 2022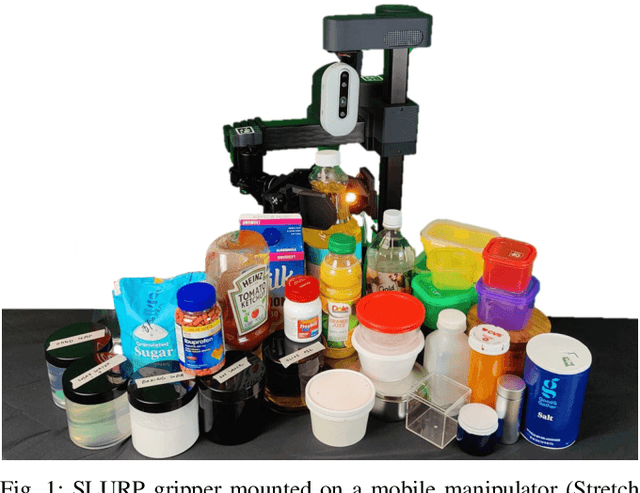
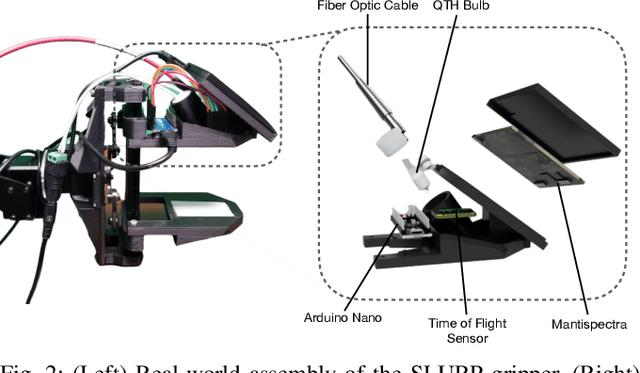
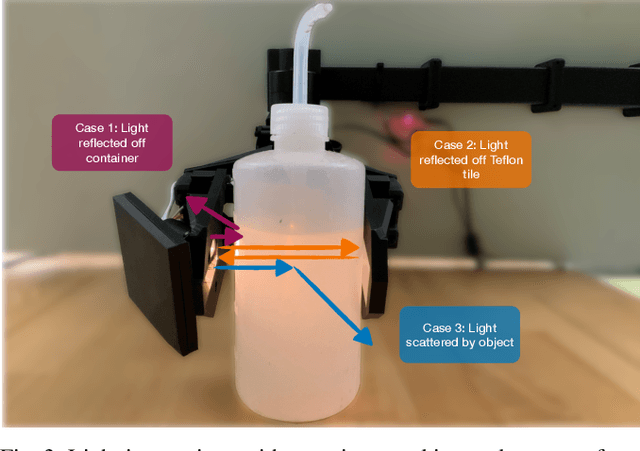
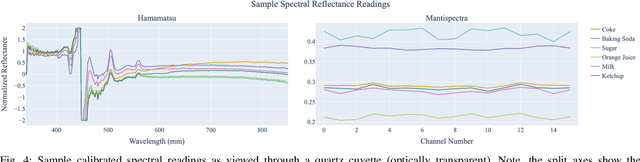
Liquids and granular media are pervasive throughout human environments. Their free-flowing nature causes people to constrain them into containers. We do so with thousands of different types of containers made out of different materials with varying sizes, shapes, and colors. In this work, we present a state-of-the-art sensing technique for robots to perceive what liquid is inside of an unknown container. We do so by integrating Visible to Near Infrared (VNIR) reflectance spectroscopy into a robot's end effector. We introduce a hierarchical model for inferring the material classes of both containers and internal contents given spectral measurements from two integrated spectrometers. To train these inference models, we capture and open source a dataset of spectral measurements from over 180 different combinations of containers and liquids. Our technique demonstrates over 85% accuracy in identifying 13 different liquids and granular media contained within 13 different containers. The sensitivity of our spectral readings allow our model to also identify the material composition of the containers themselves with 96% accuracy. Overall, VNIR spectroscopy presents a promising method to give household robots a general-purpose ability to infer the liquids inside of containers, without needing to open or manipulate the containers.
Bodies Uncovered: Learning to Manipulate Real Blankets Around People via Physics Simulations
Sep 10, 2021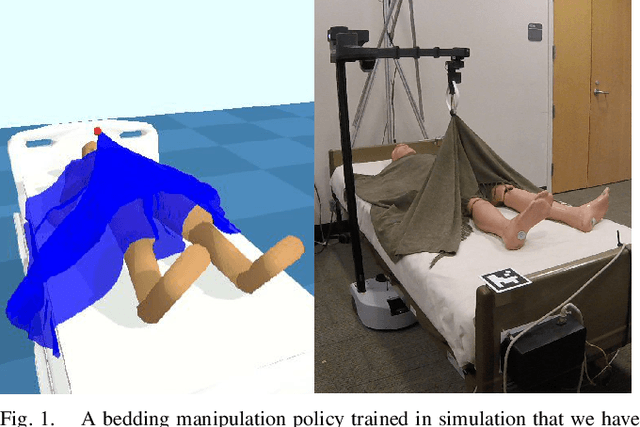
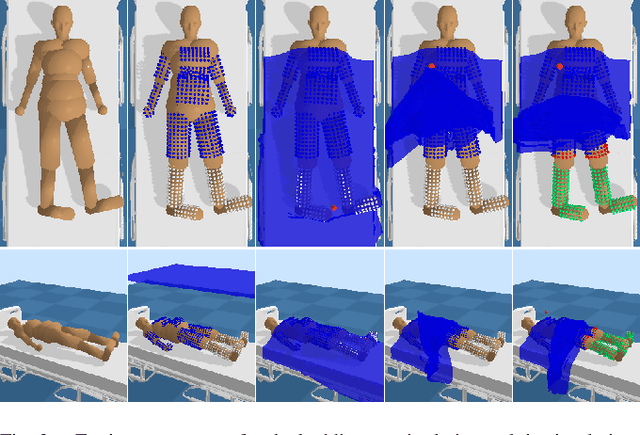
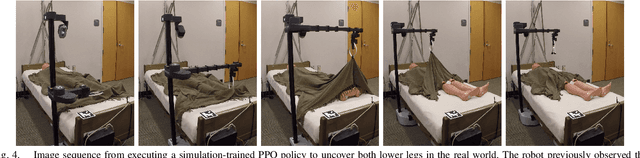
While robots present an opportunity to provide physical assistance to older adults and people with mobility impairments in bed, people frequently rest in bed with blankets that cover the majority of their body. To provide assistance for many daily self-care tasks, such as bathing, dressing, or ambulating, a caregiver must first uncover blankets from part of a person's body. In this work, we introduce a formulation for robotic bedding manipulation around people in which a robot uncovers a blanket from a target body part while ensuring the rest of the human body remains covered. We compare both reinforcement and supervised learning approaches for optimizing policies which provide a robot with grasp and release points that uncover a target part of the body. We trained and conducted evaluations of these policies in physics simulation environments that consist of a deformable cloth mesh covering a simulated human lying supine on a bed. In addition, we transfer simulation-trained policies to a real mobile manipulator and demonstrate that it can uncover a blanket from target body parts of a manikin lying in bed. Source code is available online.