 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSymmetry in Neural Network Parameter Spaces
Jun 16, 2025Modern deep learning models are highly overparameterized, resulting in large sets of parameter configurations that yield the same outputs. A significant portion of this redundancy is explained by symmetries in the parameter space--transformations that leave the network function unchanged. These symmetries shape the loss landscape and constrain learning dynamics, offering a new lens for understanding optimization, generalization, and model complexity that complements existing theory of deep learning. This survey provides an overview of parameter space symmetry. We summarize existing literature, uncover connections between symmetry and learning theory, and identify gaps and opportunities in this emerging field.
Understanding Mode Connectivity via Parameter Space Symmetry
May 29, 2025Neural network minima are often connected by curves along which train and test loss remain nearly constant, a phenomenon known as mode connectivity. While this property has enabled applications such as model merging and fine-tuning, its theoretical explanation remains unclear. We propose a new approach to exploring the connectedness of minima using parameter space symmetry. By linking the topology of symmetry groups to that of the minima, we derive the number of connected components of the minima of linear networks and show that skip connections reduce this number. We then examine when mode connectivity and linear mode connectivity hold or fail, using parameter symmetries which account for a significant part of the minimum. Finally, we provide explicit expressions for connecting curves in the minima induced by symmetry. Using the curvature of these curves, we derive conditions under which linear mode connectivity approximately holds. Our findings highlight the role of continuous symmetries in understanding the neural network loss landscape.
HiDream-I1: A High-Efficient Image Generative Foundation Model with Sparse Diffusion Transformer
May 28, 2025Recent advancements in image generative foundation models have prioritized quality improvements but often at the cost of increased computational complexity and inference latency. To address this critical trade-off, we introduce HiDream-I1, a new open-source image generative foundation model with 17B parameters that achieves state-of-the-art image generation quality within seconds. HiDream-I1 is constructed with a new sparse Diffusion Transformer (DiT) structure. Specifically, it starts with a dual-stream decoupled design of sparse DiT with dynamic Mixture-of-Experts (MoE) architecture, in which two separate encoders are first involved to independently process image and text tokens. Then, a single-stream sparse DiT structure with dynamic MoE architecture is adopted to trigger multi-model interaction for image generation in a cost-efficient manner. To support flexiable accessibility with varied model capabilities, we provide HiDream-I1 in three variants: HiDream-I1-Full, HiDream-I1-Dev, and HiDream-I1-Fast. Furthermore, we go beyond the typical text-to-image generation and remould HiDream-I1 with additional image conditions to perform precise, instruction-based editing on given images, yielding a new instruction-based image editing model namely HiDream-E1. Ultimately, by integrating text-to-image generation and instruction-based image editing, HiDream-I1 evolves to form a comprehensive image agent (HiDream-A1) capable of fully interactive image creation and refinement. To accelerate multi-modal AIGC research, we have open-sourced all the codes and model weights of HiDream-I1-Full, HiDream-I1-Dev, HiDream-I1-Fast, HiDream-E1 through our project websites: https://github.com/HiDream-ai/HiDream-I1 and https://github.com/HiDream-ai/HiDream-E1. All features can be directly experienced via https://vivago.ai/studio.
DD-Ranking: Rethinking the Evaluation of Dataset Distillation
May 19, 2025
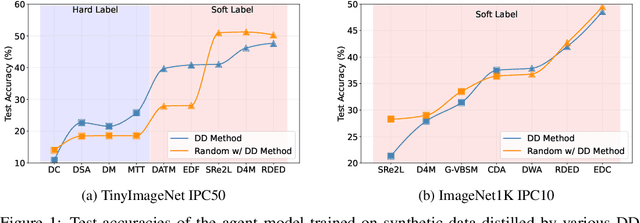
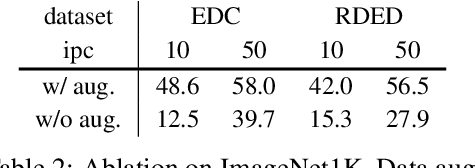
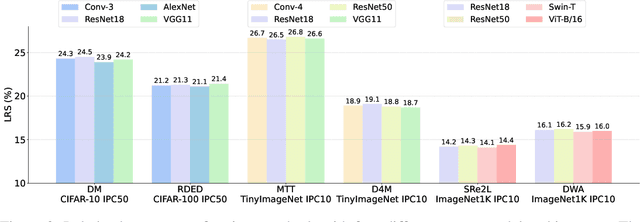
In recent years, dataset distillation has provided a reliable solution for data compression, where models trained on the resulting smaller synthetic datasets achieve performance comparable to those trained on the original datasets. To further improve the performance of synthetic datasets, various training pipelines and optimization objectives have been proposed, greatly advancing the field of dataset distillation. Recent decoupled dataset distillation methods introduce soft labels and stronger data augmentation during the post-evaluation phase and scale dataset distillation up to larger datasets (e.g., ImageNet-1K). However, this raises a question: Is accuracy still a reliable metric to fairly evaluate dataset distillation methods? Our empirical findings suggest that the performance improvements of these methods often stem from additional techniques rather than the inherent quality of the images themselves, with even randomly sampled images achieving superior results. Such misaligned evaluation settings severely hinder the development of DD. Therefore, we propose DD-Ranking, a unified evaluation framework, along with new general evaluation metrics to uncover the true performance improvements achieved by different methods. By refocusing on the actual information enhancement of distilled datasets, DD-Ranking provides a more comprehensive and fair evaluation standard for future research advancements.
RoboFAC: A Comprehensive Framework for Robotic Failure Analysis and Correction
May 18, 2025Vision-Language-Action (VLA) models have recently advanced robotic manipulation by translating natural-language instructions and image information into sequential control actions. However, these models often underperform in open-world scenarios, as they are predominantly trained on successful expert demonstrations and exhibit a limited capacity for failure recovery. In this work, we present a Robotic Failure Analysis and Correction (RoboFAC) framework to address this issue. Firstly, we construct RoboFAC dataset comprising 9,440 erroneous manipulation trajectories and 78,623 QA pairs across 16 diverse tasks and 53 scenes in both simulation and real-world environments. Leveraging our dataset, we develop RoboFAC model, which is capable of Task Understanding, Failure Analysis and Failure Correction. Experimental results demonstrate that the RoboFAC model outperforms GPT-4o by 34.1% on our evaluation benchmark. Furthermore, we integrate the RoboFAC model into a real-world VLA control pipeline as an external supervision providing correction instructions, yielding a 29.1% relative improvement on average on four real-world tasks. The results show that our RoboFAC framework effectively handles robotic failures and assists the VLA model in recovering from failures.
EarthSynth: Generating Informative Earth Observation with Diffusion Models
May 17, 2025Remote sensing image (RSI) interpretation typically faces challenges due to the scarcity of labeled data, which limits the performance of RSI interpretation tasks. To tackle this challenge, we propose EarthSynth, a diffusion-based generative foundation model that enables synthesizing multi-category, cross-satellite labeled Earth observation for downstream RSI interpretation tasks. To the best of our knowledge, EarthSynth is the first to explore multi-task generation for remote sensing. EarthSynth, trained on the EarthSynth-180K dataset, employs the Counterfactual Composition training strategy to improve training data diversity and enhance category control. Furthermore, a rule-based method of R-Filter is proposed to filter more informative synthetic data for downstream tasks. We evaluate our EarthSynth on scene classification, object detection, and semantic segmentation in open-world scenarios, offering a practical solution for advancing RSI interpretation.
PhysLLM: Harnessing Large Language Models for Cross-Modal Remote Physiological Sensing
May 06, 2025Remote photoplethysmography (rPPG) enables non-contact physiological measurement but remains highly susceptible to illumination changes, motion artifacts, and limited temporal modeling. Large Language Models (LLMs) excel at capturing long-range dependencies, offering a potential solution but struggle with the continuous, noise-sensitive nature of rPPG signals due to their text-centric design. To bridge this gap, we introduce PhysLLM, a collaborative optimization framework that synergizes LLMs with domain-specific rPPG components. Specifically, the Text Prototype Guidance (TPG) strategy is proposed to establish cross-modal alignment by projecting hemodynamic features into LLM-interpretable semantic space, effectively bridging the representational gap between physiological signals and linguistic tokens. Besides, a novel Dual-Domain Stationary (DDS) Algorithm is proposed for resolving signal instability through adaptive time-frequency domain feature re-weighting. Finally, rPPG task-specific cues systematically inject physiological priors through physiological statistics, environmental contextual answering, and task description, leveraging cross-modal learning to integrate both visual and textual information, enabling dynamic adaptation to challenging scenarios like variable illumination and subject movements. Evaluation on four benchmark datasets, PhysLLM achieves state-of-the-art accuracy and robustness, demonstrating superior generalization across lighting variations and motion scenarios.
DNAD: Differentiable Neural Architecture Distillation
Apr 25, 2025To meet the demand for designing efficient neural networks with appropriate trade-offs between model performance (e.g., classification accuracy) and computational complexity, the differentiable neural architecture distillation (DNAD) algorithm is developed based on two cores, namely search by deleting and search by imitating. Primarily, to derive neural architectures in a space where cells of the same type no longer share the same topology, the super-network progressive shrinking (SNPS) algorithm is developed based on the framework of differentiable architecture search (DARTS), i.e., search by deleting. Unlike conventional DARTS-based approaches which yield neural architectures with simple structures and derive only one architecture during the search procedure, SNPS is able to derive a Pareto-optimal set of architectures with flexible structures by forcing the dynamic super-network shrink from a dense structure to a sparse one progressively. Furthermore, since knowledge distillation (KD) has shown great effectiveness to train a compact network with the assistance of an over-parameterized model, we integrate SNPS with KD to formulate the DNAD algorithm, i.e., search by imitating. By minimizing behavioral differences between the super-network and teacher network, the over-fitting of one-level DARTS is avoided and well-performed neural architectures are derived. Experiments on CIFAR-10 and ImageNet classification tasks demonstrate that both SNPS and DNAD are able to derive a set of architectures which achieve similar or lower error rates with fewer parameters and FLOPs. Particularly, DNAD achieves the top-1 error rate of 23.7% on ImageNet classification with a model of 6.0M parameters and 598M FLOPs, which outperforms most DARTS-based methods.
FX-DARTS: Designing Topology-unconstrained Architectures with Differentiable Architecture Search and Entropy-based Super-network Shrinking
Apr 25, 2025Strong priors are imposed on the search space of Differentiable Architecture Search (DARTS), such that cells of the same type share the same topological structure and each intermediate node retains two operators from distinct nodes. While these priors reduce optimization difficulties and improve the applicability of searched architectures, they hinder the subsequent development of automated machine learning (Auto-ML) and prevent the optimization algorithm from exploring more powerful neural networks through improved architectural flexibility. This paper aims to reduce these prior constraints by eliminating restrictions on cell topology and modifying the discretization mechanism for super-networks. Specifically, the Flexible DARTS (FX-DARTS) method, which leverages an Entropy-based Super-Network Shrinking (ESS) framework, is presented to address the challenges arising from the elimination of prior constraints. Notably, FX-DARTS enables the derivation of neural architectures without strict prior rules while maintaining the stability in the enlarged search space. Experimental results on image classification benchmarks demonstrate that FX-DARTS is capable of exploring a set of neural architectures with competitive trade-offs between performance and computational complexity within a single search procedure.
Improving Learning to Optimize Using Parameter Symmetries
Apr 21, 2025We analyze a learning-to-optimize (L2O) algorithm that exploits parameter space symmetry to enhance optimization efficiency. Prior work has shown that jointly learning symmetry transformations and local updates improves meta-optimizer performance. Supporting this, our theoretical analysis demonstrates that even without identifying the optimal group element, the method locally resembles Newton's method. We further provide an example where the algorithm provably learns the correct symmetry transformation during training. To empirically evaluate L2O with teleportation, we introduce a benchmark, analyze its success and failure cases, and show that enhancements like momentum further improve performance. Our results highlight the potential of leveraging neural network parameter space symmetry to advance meta-optimization.