 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgenerf2nerf: Pairwise Registration of Neural Radiance Fields
Nov 03, 2022



We introduce a technique for pairwise registration of neural fields that extends classical optimization-based local registration (i.e. ICP) to operate on Neural Radiance Fields (NeRF) -- neural 3D scene representations trained from collections of calibrated images. NeRF does not decompose illumination and color, so to make registration invariant to illumination, we introduce the concept of a ''surface field'' -- a field distilled from a pre-trained NeRF model that measures the likelihood of a point being on the surface of an object. We then cast nerf2nerf registration as a robust optimization that iteratively seeks a rigid transformation that aligns the surface fields of the two scenes. We evaluate the effectiveness of our technique by introducing a dataset of pre-trained NeRF scenes -- our synthetic scenes enable quantitative evaluations and comparisons to classical registration techniques, while our real scenes demonstrate the validity of our technique in real-world scenarios. Additional results available at: https://nerf2nerf.github.io
CUF: Continuous Upsampling Filters
Oct 20, 2022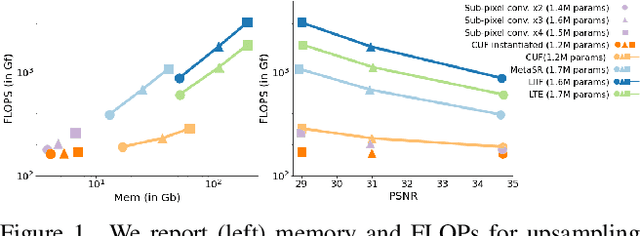


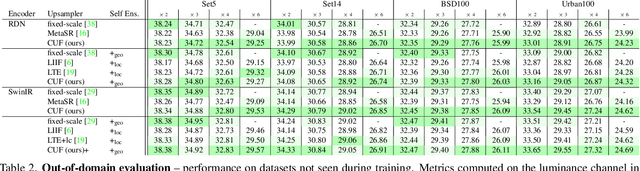
Neural fields have rapidly been adopted for representing 3D signals, but their application to more classical 2D image-processing has been relatively limited. In this paper, we consider one of the most important operations in image processing: upsampling. In deep learning, learnable upsampling layers have extensively been used for single image super-resolution. We propose to parameterize upsampling kernels as neural fields. This parameterization leads to a compact architecture that obtains a 40-fold reduction in the number of parameters when compared with competing arbitrary-scale super-resolution architectures. When upsampling images of size 256x256 we show that our architecture is 2x-10x more efficient than competing arbitrary-scale super-resolution architectures, and more efficient than sub-pixel convolutions when instantiated to a single-scale model. In the general setting, these gains grow polynomially with the square of the target scale. We validate our method on standard benchmarks showing such efficiency gains can be achieved without sacrifices in super-resolution performance.
Novel View Synthesis with Diffusion Models
Oct 06, 2022
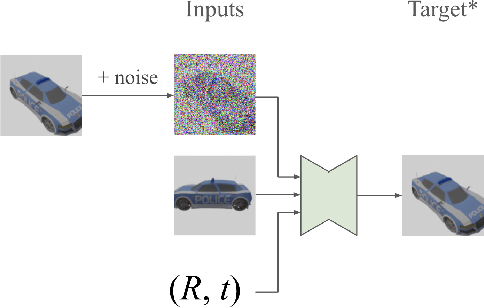
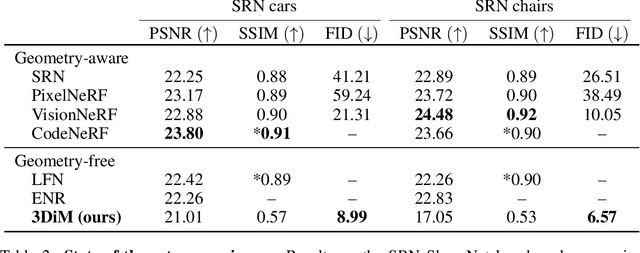
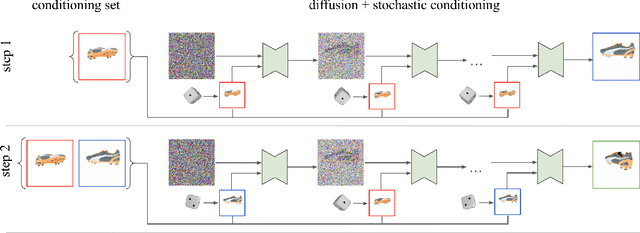
We present 3DiM, a diffusion model for 3D novel view synthesis, which is able to translate a single input view into consistent and sharp completions across many views. The core component of 3DiM is a pose-conditional image-to-image diffusion model, which takes a source view and its pose as inputs, and generates a novel view for a target pose as output. 3DiM can generate multiple views that are 3D consistent using a novel technique called stochastic conditioning. The output views are generated autoregressively, and during the generation of each novel view, one selects a random conditioning view from the set of available views at each denoising step. We demonstrate that stochastic conditioning significantly improves the 3D consistency of a naive sampler for an image-to-image diffusion model, which involves conditioning on a single fixed view. We compare 3DiM to prior work on the SRN ShapeNet dataset, demonstrating that 3DiM's generated completions from a single view achieve much higher fidelity, while being approximately 3D consistent. We also introduce a new evaluation methodology, 3D consistency scoring, to measure the 3D consistency of a generated object by training a neural field on the model's output views. 3DiM is geometry free, does not rely on hyper-networks or test-time optimization for novel view synthesis, and allows a single model to easily scale to a large number of scenes.
Attention Beats Concatenation for Conditioning Neural Fields
Sep 21, 2022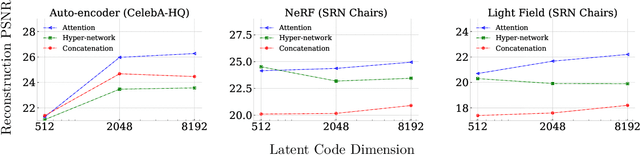


Neural fields model signals by mapping coordinate inputs to sampled values. They are becoming an increasingly important backbone architecture across many fields from vision and graphics to biology and astronomy. In this paper, we explore the differences between common conditioning mechanisms within these networks, an essential ingredient in shifting neural fields from memorization of signals to generalization, where the set of signals lying on a manifold is modelled jointly. In particular, we are interested in the scaling behaviour of these mechanisms to increasingly high-dimensional conditioning variables. As we show in our experiments, high-dimensional conditioning is key to modelling complex data distributions, thus it is important to determine what architecture choices best enable this when working on such problems. To this end, we run experiments modelling 2D, 3D, and 4D signals with neural fields, employing concatenation, hyper-network, and attention-based conditioning strategies -- a necessary but laborious effort that has not been performed in the literature. We find that attention-based conditioning outperforms other approaches in a variety of settings.
MobileNeRF: Exploiting the Polygon Rasterization Pipeline for Efficient Neural Field Rendering on Mobile Architectures
Aug 06, 2022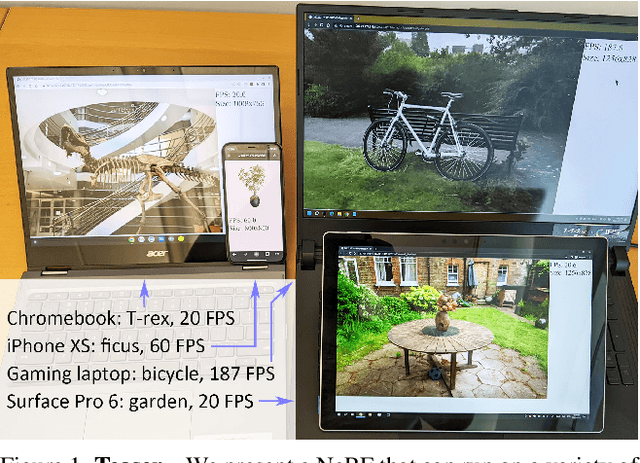
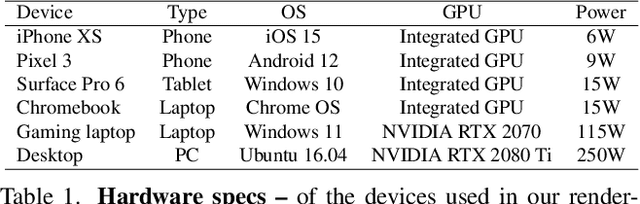
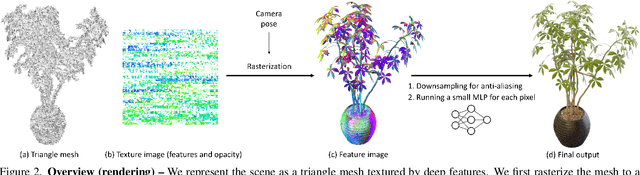
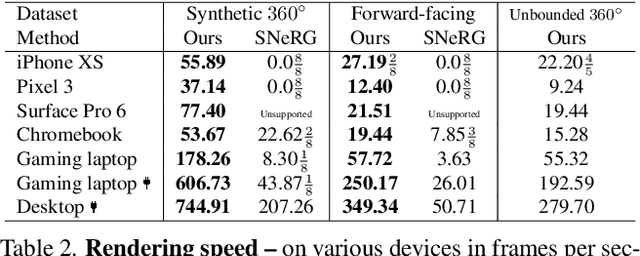
Neural Radiance Fields (NeRFs) have demonstrated amazing ability to synthesize images of 3D scenes from novel views. However, they rely upon specialized volumetric rendering algorithms based on ray marching that are mismatched to the capabilities of widely deployed graphics hardware. This paper introduces a new NeRF representation based on textured polygons that can synthesize novel images efficiently with standard rendering pipelines. The NeRF is represented as a set of polygons with textures representing binary opacities and feature vectors. Traditional rendering of the polygons with a z-buffer yields an image with features at every pixel, which are interpreted by a small, view-dependent MLP running in a fragment shader to produce a final pixel color. This approach enables NeRFs to be rendered with the traditional polygon rasterization pipeline, which provides massive pixel-level parallelism, achieving interactive frame rates on a wide range of compute platforms, including mobile phones.
NeuralBF: Neural Bilateral Filtering for Top-down Instance Segmentation on Point Clouds
Jul 20, 2022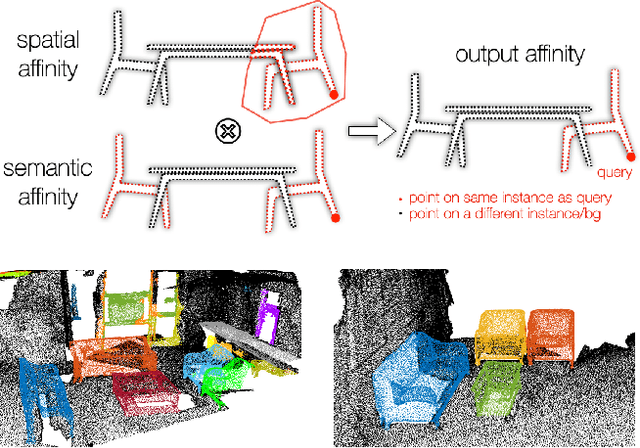
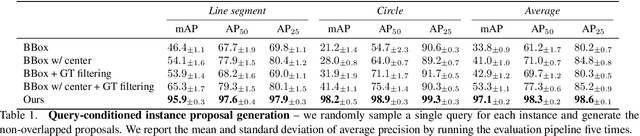
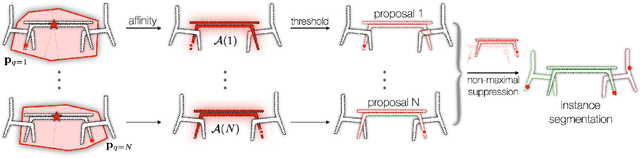
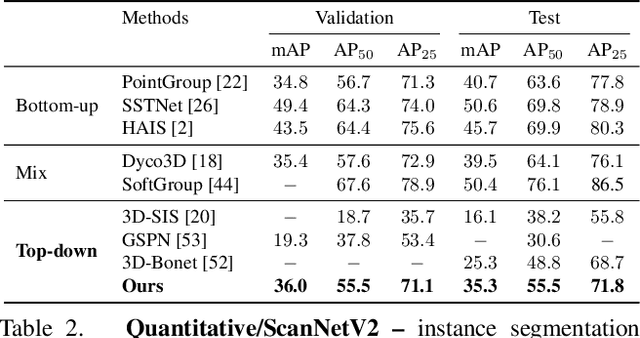
We introduce a method for instance proposal generation for 3D point clouds. Existing techniques typically directly regress proposals in a single feed-forward step, leading to inaccurate estimation. We show that this serves as a critical bottleneck, and propose a method based on iterative bilateral filtering with learned kernels. Following the spirit of bilateral filtering, we consider both the deep feature embeddings of each point, as well as their locations in the 3D space. We show via synthetic experiments that our method brings drastic improvements when generating instance proposals for a given point of interest. We further validate our method on the challenging ScanNet benchmark, achieving the best instance segmentation performance amongst the sub-category of top-down methods.
D$^2$NeRF: Self-Supervised Decoupling of Dynamic and Static Objects from a Monocular Video
Jun 01, 2022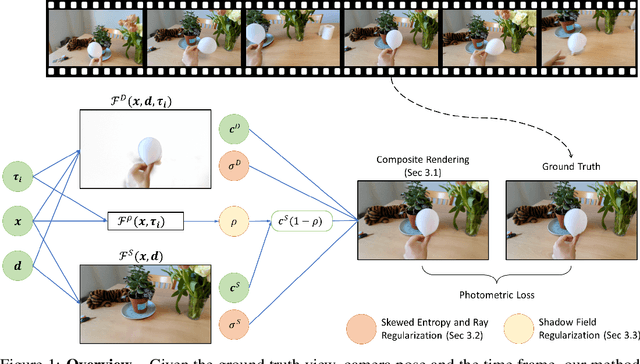
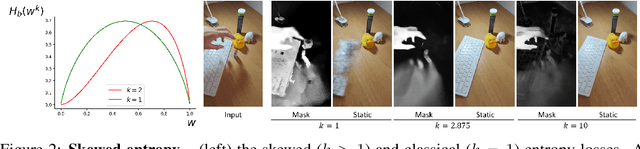

Given a monocular video, segmenting and decoupling dynamic objects while recovering the static environment is a widely studied problem in machine intelligence. Existing solutions usually approach this problem in the image domain, limiting their performance and understanding of the environment. We introduce Decoupled Dynamic Neural Radiance Field (D$^2$NeRF), a self-supervised approach that takes a monocular video and learns a 3D scene representation which decouples moving objects, including their shadows, from the static background. Our method represents the moving objects and the static background by two separate neural radiance fields with only one allowing for temporal changes. A naive implementation of this approach leads to the dynamic component taking over the static one as the representation of the former is inherently more general and prone to overfitting. To this end, we propose a novel loss to promote correct separation of phenomena. We further propose a shadow field network to detect and decouple dynamically moving shadows. We introduce a new dataset containing various dynamic objects and shadows and demonstrate that our method can achieve better performance than state-of-the-art approaches in decoupling dynamic and static 3D objects, occlusion and shadow removal, and image segmentation for moving objects.
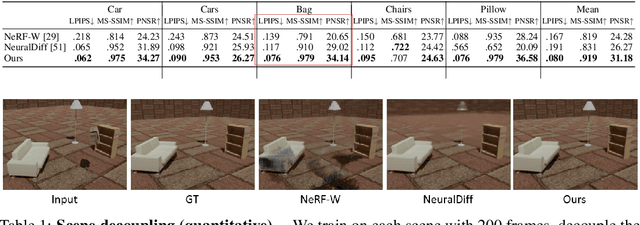
Panoptic Neural Fields: A Semantic Object-Aware Neural Scene Representation
May 09, 2022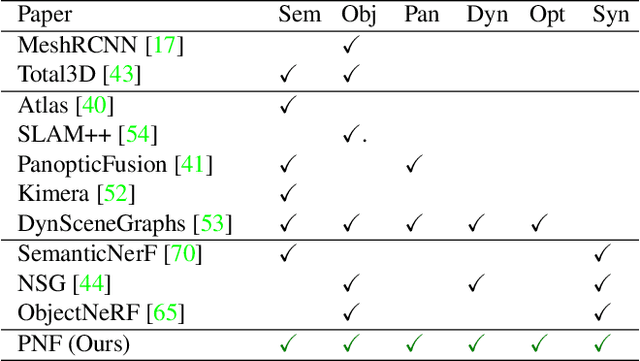
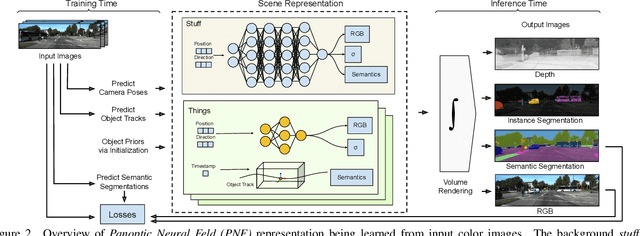
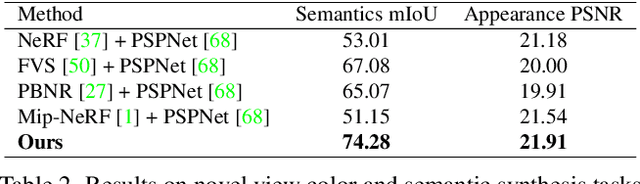
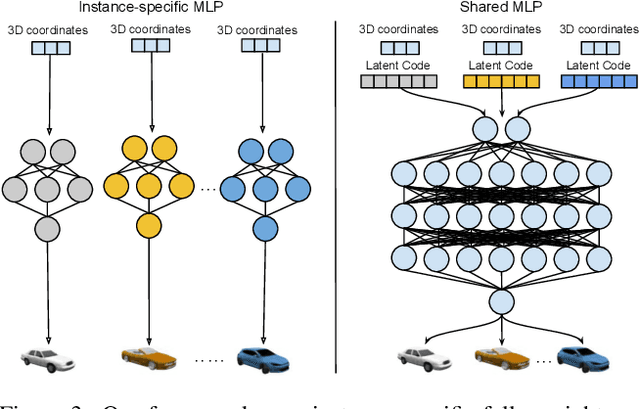
We present Panoptic Neural Fields (PNF), an object-aware neural scene representation that decomposes a scene into a set of objects (things) and background (stuff). Each object is represented by an oriented 3D bounding box and a multi-layer perceptron (MLP) that takes position, direction, and time and outputs density and radiance. The background stuff is represented by a similar MLP that additionally outputs semantic labels. Each object MLPs are instance-specific and thus can be smaller and faster than previous object-aware approaches, while still leveraging category-specific priors incorporated via meta-learned initialization. Our model builds a panoptic radiance field representation of any scene from just color images. We use off-the-shelf algorithms to predict camera poses, object tracks, and 2D image semantic segmentations. Then we jointly optimize the MLP weights and bounding box parameters using analysis-by-synthesis with self-supervision from color images and pseudo-supervision from predicted semantic segmentations. During experiments with real-world dynamic scenes, we find that our model can be used effectively for several tasks like novel view synthesis, 2D panoptic segmentation, 3D scene editing, and multiview depth prediction.
Kubric: A scalable dataset generator
Mar 07, 2022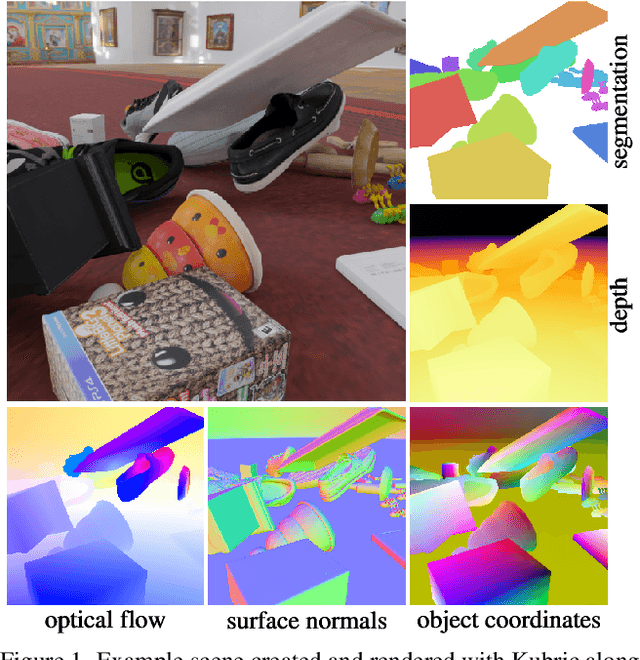
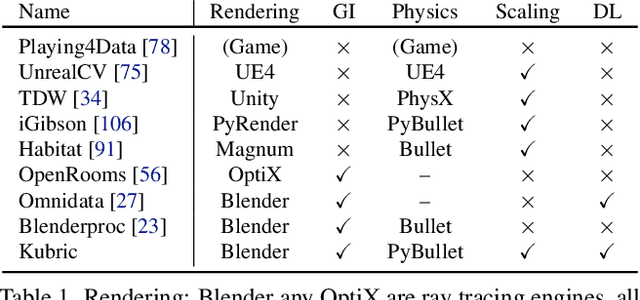
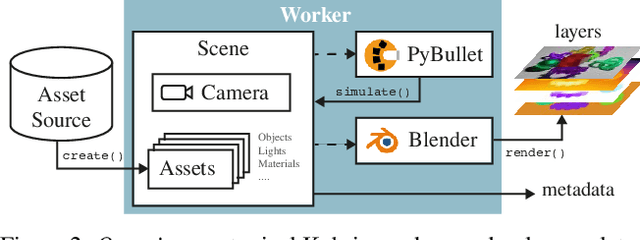
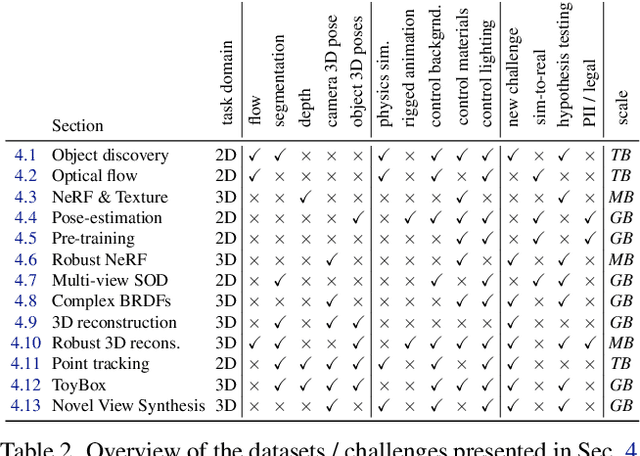
Data is the driving force of machine learning, with the amount and quality of training data often being more important for the performance of a system than architecture and training details. But collecting, processing and annotating real data at scale is difficult, expensive, and frequently raises additional privacy, fairness and legal concerns. Synthetic data is a powerful tool with the potential to address these shortcomings: 1) it is cheap 2) supports rich ground-truth annotations 3) offers full control over data and 4) can circumvent or mitigate problems regarding bias, privacy and licensing. Unfortunately, software tools for effective data generation are less mature than those for architecture design and training, which leads to fragmented generation efforts. To address these problems we introduce Kubric, an open-source Python framework that interfaces with PyBullet and Blender to generate photo-realistic scenes, with rich annotations, and seamlessly scales to large jobs distributed over thousands of machines, and generating TBs of data. We demonstrate the effectiveness of Kubric by presenting a series of 13 different generated datasets for tasks ranging from studying 3D NeRF models to optical flow estimation. We release Kubric, the used assets, all of the generation code, as well as the rendered datasets for reuse and modification.
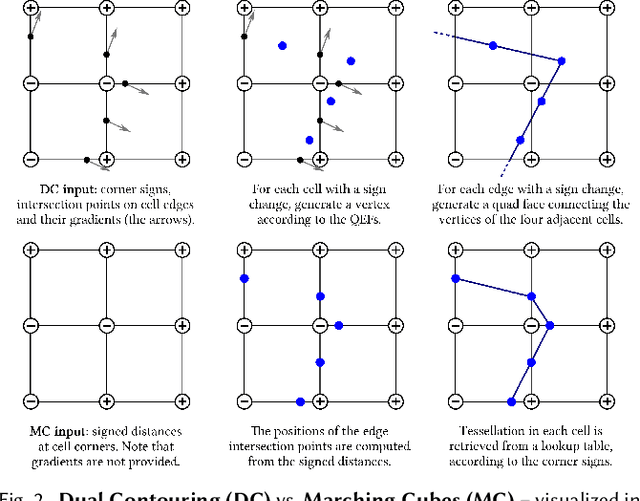
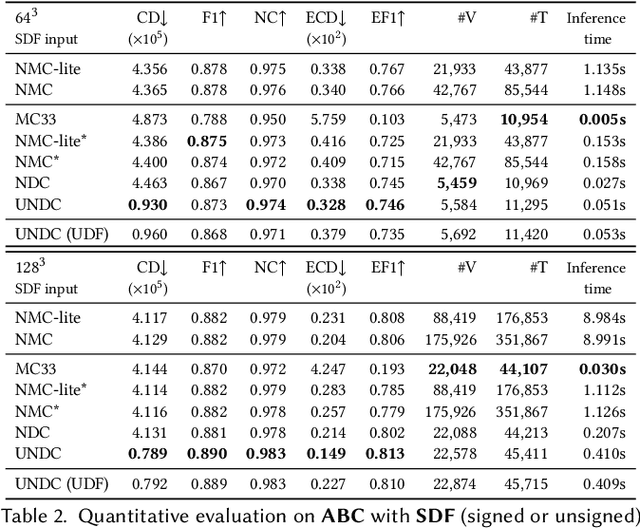
Neural Dual Contouring
Feb 04, 2022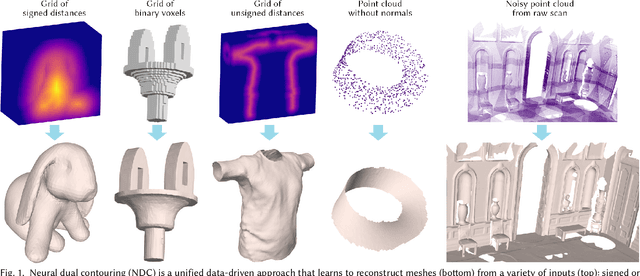
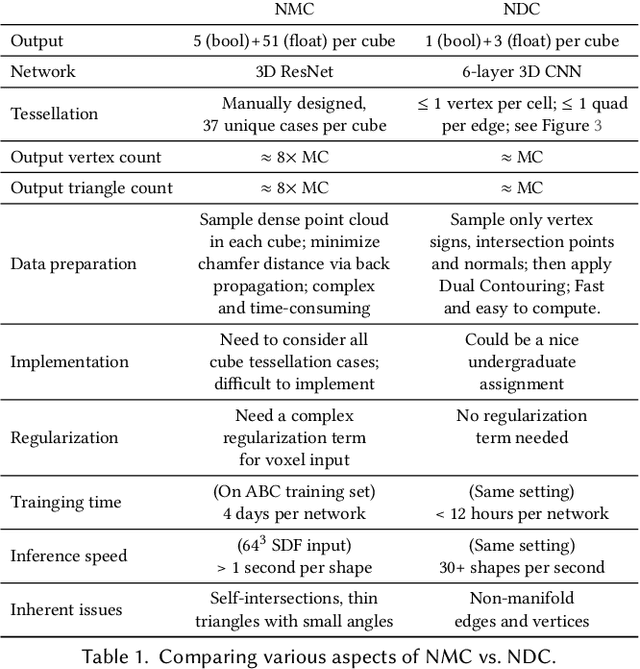
We introduce neural dual contouring (NDC), a new data-driven approach to mesh reconstruction based on dual contouring (DC). Like traditional DC, it produces exactly one vertex per grid cell and one quad for each grid edge intersection, a natural and efficient structure for reproducing sharp features. However, rather than computing vertex locations and edge crossings with hand-crafted functions that depend directly on difficult-to-obtain surface gradients, NDC uses a neural network to predict them. As a result, NDC can be trained to produce meshes from signed or unsigned distance fields, binary voxel grids, or point clouds (with or without normals); and it can produce open surfaces in cases where the input represents a sheet or partial surface. During experiments with five prominent datasets, we find that NDC, when trained on one of the datasets, generalizes well to the others. Furthermore, NDC provides better surface reconstruction accuracy, feature preservation, output complexity, triangle quality, and inference time in comparison to previous learned (e.g., neural marching cubes, convolutional occupancy networks) and traditional (e.g., Poisson) methods.