 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Hyperspectral Neutron CT with Material Decomposition
Oct 06, 2021
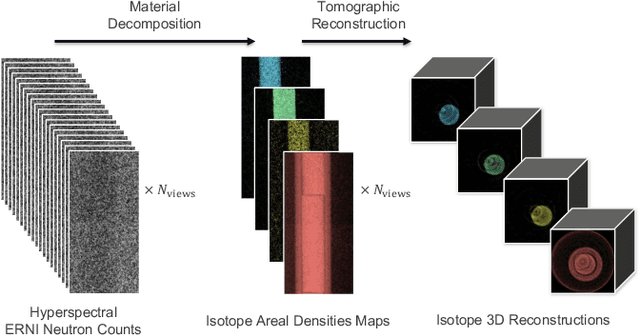
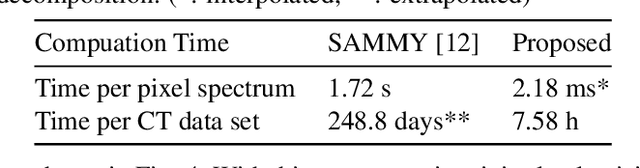
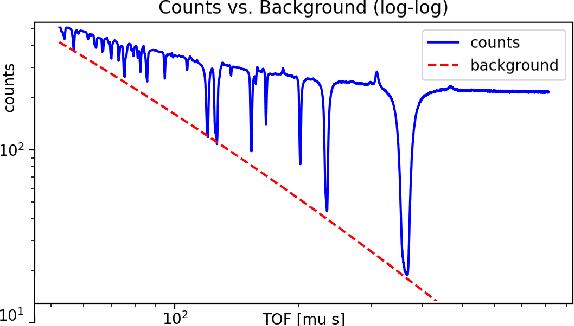
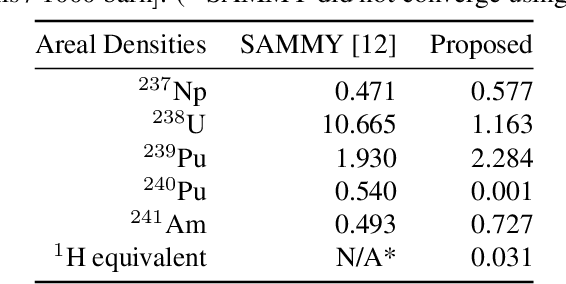
Energy resolved neutron imaging (ERNI) is an advanced neutron radiography technique capable of non-destructively extracting spatial isotopic information within a given material. Energy-dependent radiography image sequences can be created by utilizing neutron time-of-flight techniques. In combination with uniquely characteristic isotopic neutron cross-section spectra, isotopic areal densities can be determined on a per-pixel basis, thus resulting in a set of areal density images for each isotope present in the sample. By preforming ERNI measurements over several rotational views, an isotope decomposed 3D computed tomography is possible. We demonstrate a method involving a robust and automated background estimation based on a linear programming formulation. The extremely high noise due to low count measurements is overcome using a sparse coding approach. It allows for a significant computation time improvement, from weeks to a few hours compared to existing neutron evaluation tools, enabling at the present stage a semi-quantitative, user-friendly routine application.
* 5 pages, 4 figures
Robust Multi-Robot Trajectory Generation Using Alternating Direction Method of Multiplier
Nov 18, 2021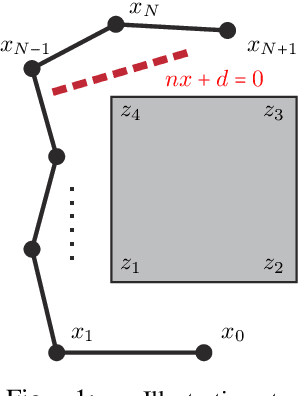
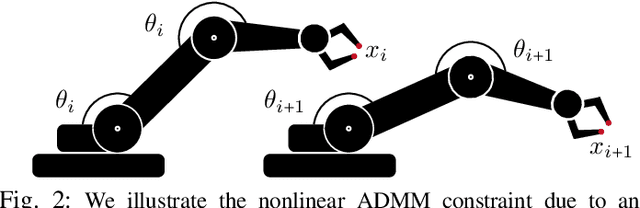
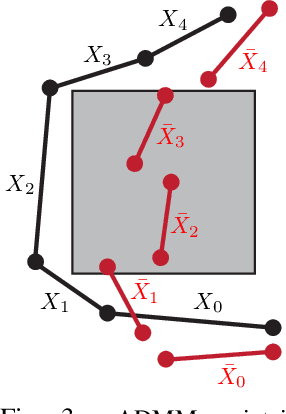
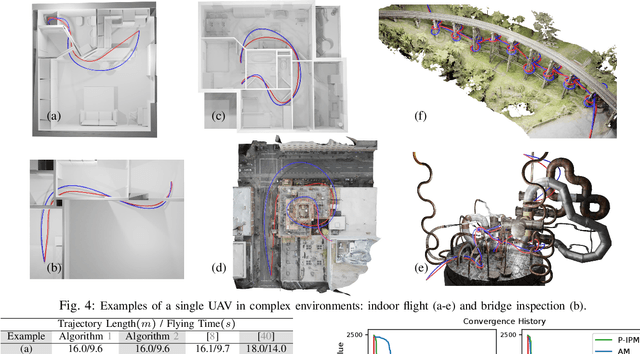
We propose a variant of alternating direction method of multiplier (ADMM) to solve constrained trajectory optimization problems. Our ADMM framework breaks a joint optimization into small sub-problems, leading to a low iteration cost and decentralized parameter updates. Our method inherits the theoretical properties of primal interior point method (P-IPM), i.e., guaranteed collision avoidance and homotopy preservation, while being orders of magnitude faster. We have analyzed the convergence and evaluated our method for time-optimal multi-UAV trajectory optimizations and simultaneous goal-reaching of multiple robot arms, where we take into consider kinematics-, dynamics-limits, and homotopy-preserving collision constraints. Our method highlights 10-100 times speedup, while generating trajectories of comparable qualities as state-of-the-art P-IPM solver.
Deep Geospatial Interpolation Networks
Aug 15, 2021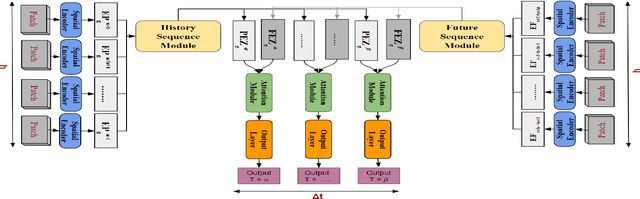
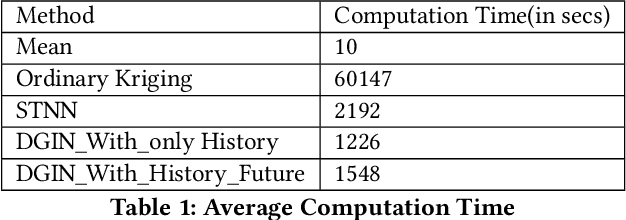
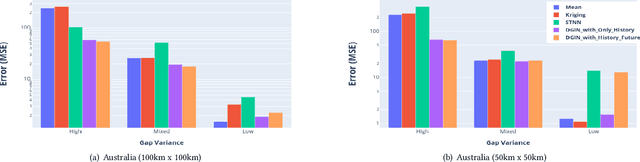
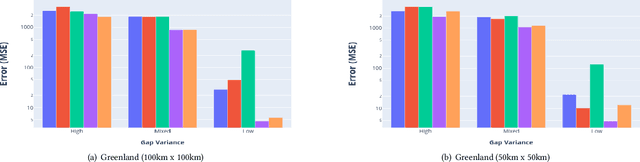
Interpolation in Spatio-temporal data has applications in various domains such as climate, transportation, and mining. Spatio-Temporal interpolation is highly challenging due to the complex spatial and temporal relationships. However, traditional techniques such as Kriging suffer from high running time and poor performance on data that exhibit high variance across space and time dimensions. To this end, we propose a novel deep neural network called as Deep Geospatial Interpolation Network(DGIN), which incorporates both spatial and temporal relationships and has significantly lower training time. DGIN consists of three major components: Spatial Encoder to capture the spatial dependencies, Sequential module to incorporate the temporal dynamics, and an Attention block to learn the importance of the temporal neighborhood around the gap. We evaluate DGIN on the MODIS reflectance dataset from two different regions. Our experimental results indicate that DGIN has two advantages: (a) it outperforms alternative approaches (has lower MSE with p-value < 0.01) and, (b) it has significantly low execution time than Kriging.
GPCO: An Unsupervised Green Point Cloud Odometry Method
Dec 08, 2021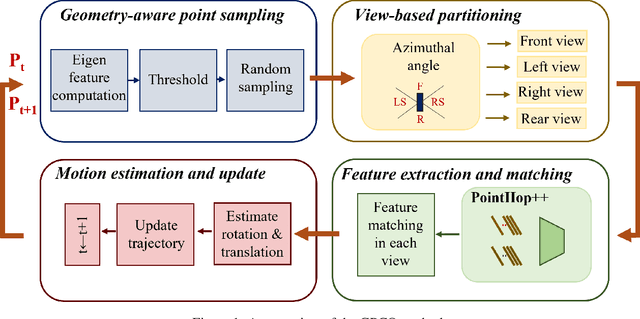
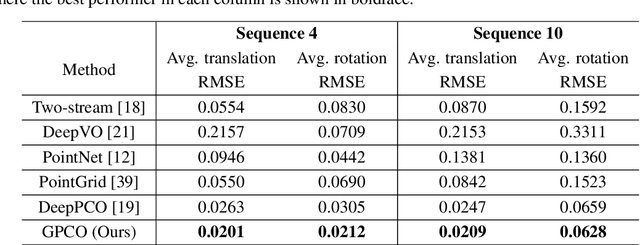
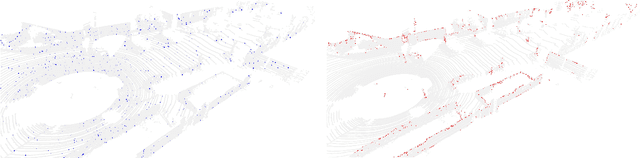
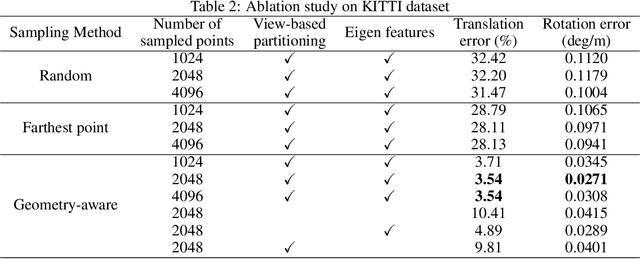
Visual odometry aims to track the incremental motion of an object using the information captured by visual sensors. In this work, we study the point cloud odometry problem, where only the point cloud scans obtained by the LiDAR (Light Detection And Ranging) are used to estimate object's motion trajectory. A lightweight point cloud odometry solution is proposed and named the green point cloud odometry (GPCO) method. GPCO is an unsupervised learning method that predicts object motion by matching features of consecutive point cloud scans. It consists of three steps. First, a geometry-aware point sampling scheme is used to select discriminant points from the large point cloud. Second, the view is partitioned into four regions surrounding the object, and the PointHop++ method is used to extract point features. Third, point correspondences are established to estimate object motion between two consecutive scans. Experiments on the KITTI dataset are conducted to demonstrate the effectiveness of the GPCO method. It is observed that GPCO outperforms benchmarking deep learning methods in accuracy while it has a significantly smaller model size and less training time.
An Informative Tracking Benchmark
Dec 13, 2021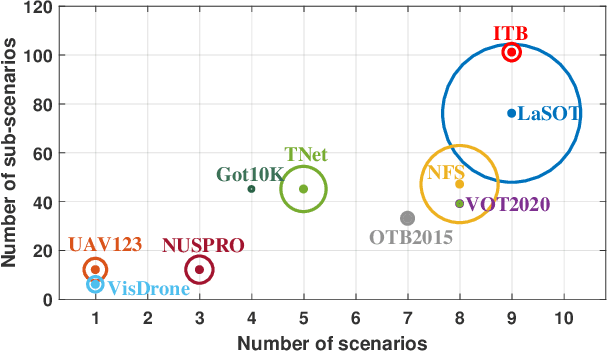
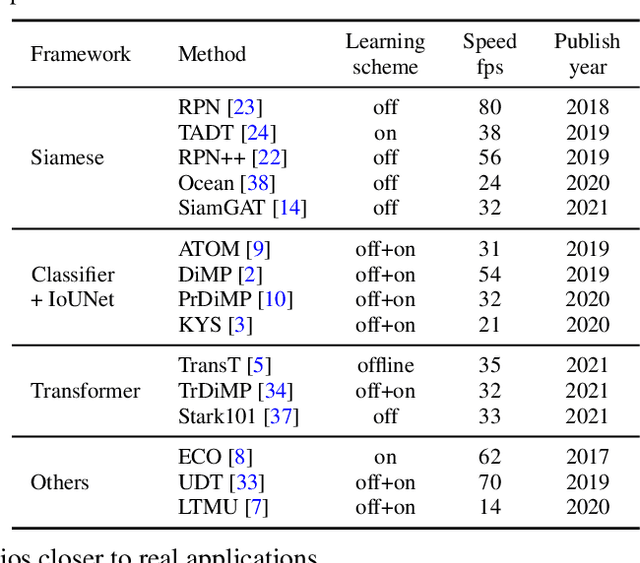
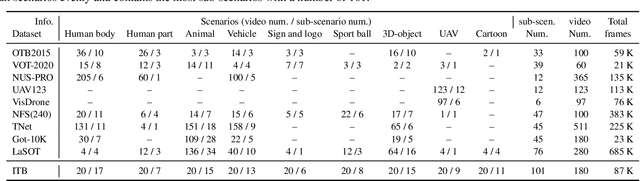
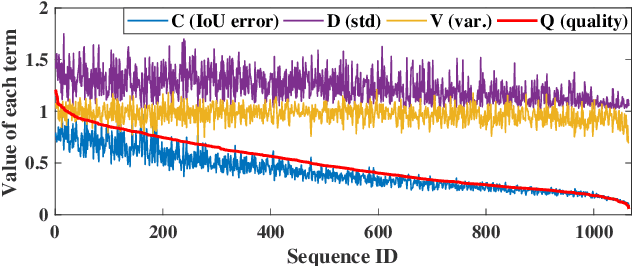
Along with the rapid progress of visual tracking, existing benchmarks become less informative due to redundancy of samples and weak discrimination between current trackers, making evaluations on all datasets extremely time-consuming. Thus, a small and informative benchmark, which covers all typical challenging scenarios to facilitate assessing the tracker performance, is of great interest. In this work, we develop a principled way to construct a small and informative tracking benchmark (ITB) with 7% out of 1.2 M frames of existing and newly collected datasets, which enables efficient evaluation while ensuring effectiveness. Specifically, we first design a quality assessment mechanism to select the most informative sequences from existing benchmarks taking into account 1) challenging level, 2) discriminative strength, 3) and density of appearance variations. Furthermore, we collect additional sequences to ensure the diversity and balance of tracking scenarios, leading to a total of 20 sequences for each scenario. By analyzing the results of 15 state-of-the-art trackers re-trained on the same data, we determine the effective methods for robust tracking under each scenario and demonstrate new challenges for future research direction in this field.
Technological Trends and Key Communication Enablers for eVTOLs
Oct 17, 2021
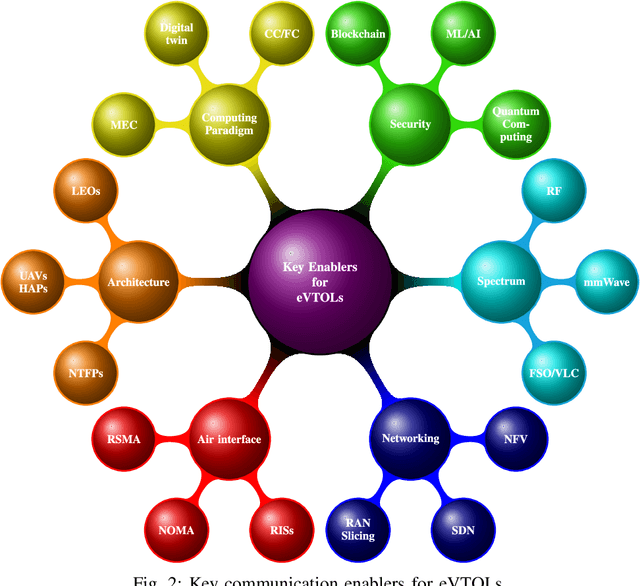
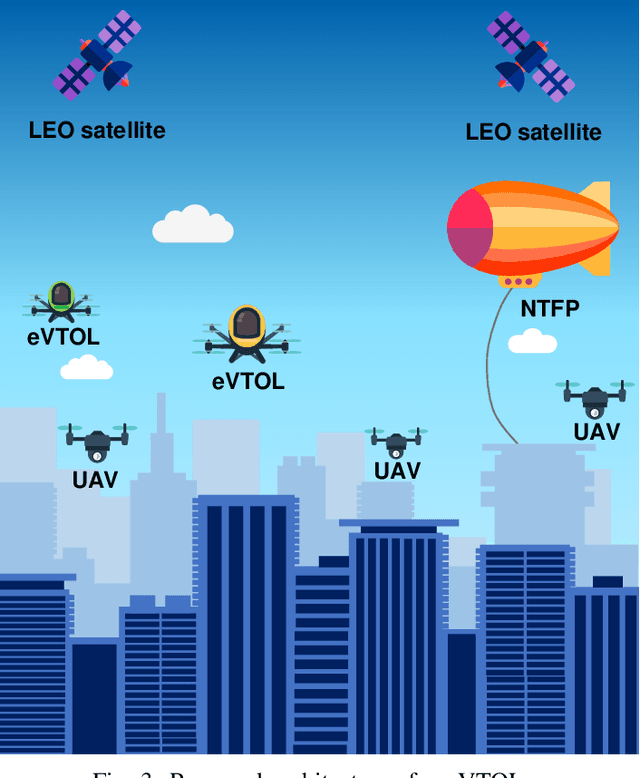
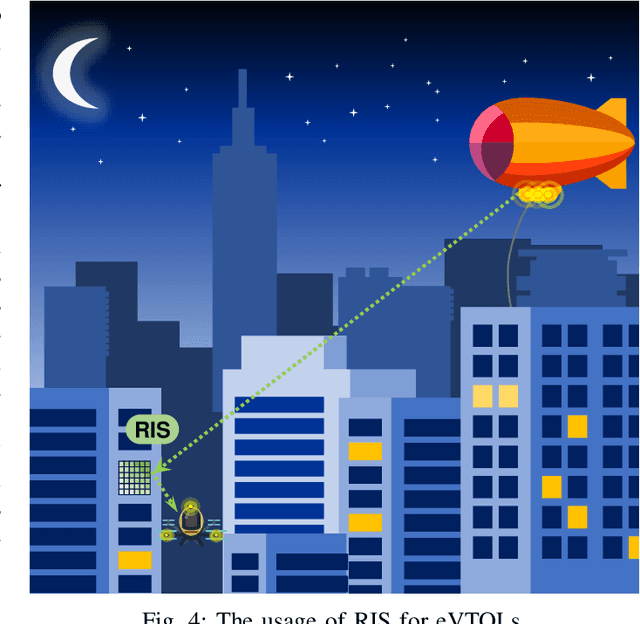
The world is looking for a new exciting form of transportation that will cut our travel times considerably. In 2021, the time has come for flying cars to become the new transportation system of this century. Electric vertical take-off and landing (eVTOL) vehicles, which are a type of flying cars, are predicted to be used for passenger and package transportation in dense cities. In order to fly safely and reliably, wireless communications for eVTOLs must be developed with stringent eVTOL communication requirements. Indeed, their communication needs to be ultra-reliable, secure with ultra-high data rate and low latency to fulfill various tasks such as autonomous driving, sharing a massive amount of data in a short amount of time, and high-level communication security. In this paper, we propose major key communication enablers for eVTOLs ranging from the architecture, air-interface, networking, frequencies, security, and computing. To show the relevance and the impact of one of the key enablers, we carried out comparative simulations to show the superiority compared to the current technology. We compared the usage of an air-based communication infrastructure with a tower mast in a realistic scenario involving eVTOLs, delivery drones, pedestrians, and vehicles.
Contact-Rich Manipulation of a Flexible Object based on Deep Predictive Learning using Vision and Tactility
Dec 13, 2021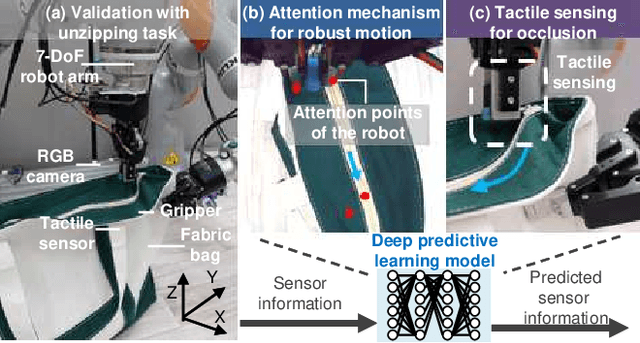
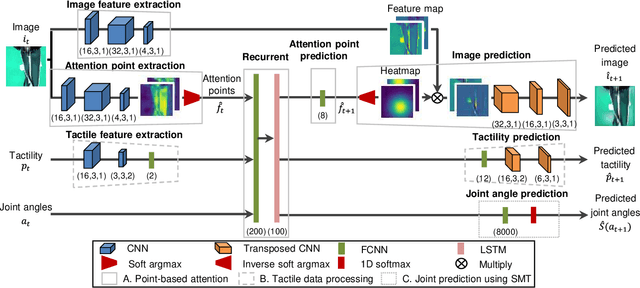
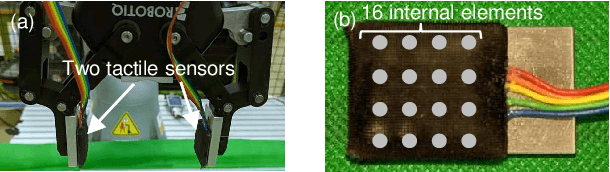
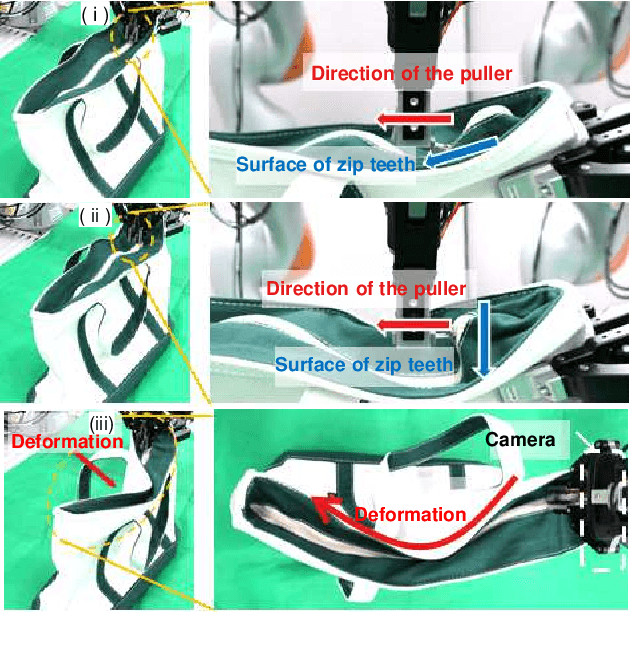
We achieved contact-rich flexible object manipulation, which was difficult to control with vision alone. In the unzipping task we chose as a validation task, the gripper grasps the puller, which hides the bag state such as the direction and amount of deformation behind it, making it difficult to obtain information to perform the task by vision alone. Additionally, the flexible fabric bag state constantly changes during operation, so the robot needs to dynamically respond to the change. However, the appropriate robot behavior for all bag states is difficult to prepare in advance. To solve this problem, we developed a model that can perform contact-rich flexible object manipulation by real-time prediction of vision with tactility. We introduced a point-based attention mechanism for extracting image features, softmax transformation for predicting motions, and convolutional neural network for extracting tactile features. The results of experiments using a real robot arm revealed that our method can realize motions responding to the deformation of the bag while reducing the load on the zipper. Furthermore, using tactility improved the success rate from 56.7% to 93.3% compared with vision alone, demonstrating the effectiveness and high performance of our method.
Koopman Linearization for Data-Driven Batch State Estimation of Control-Affine Systems
Sep 14, 2021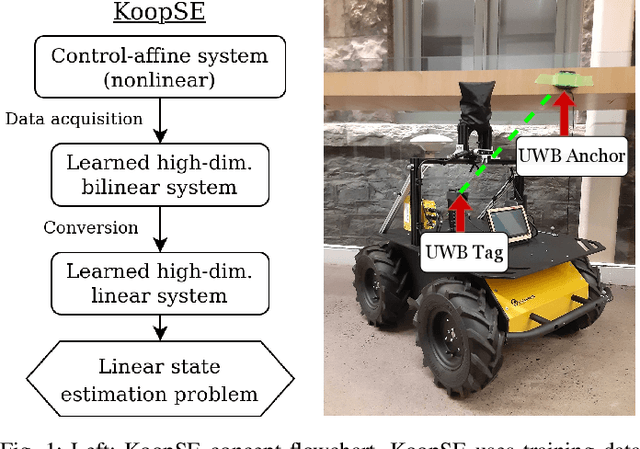
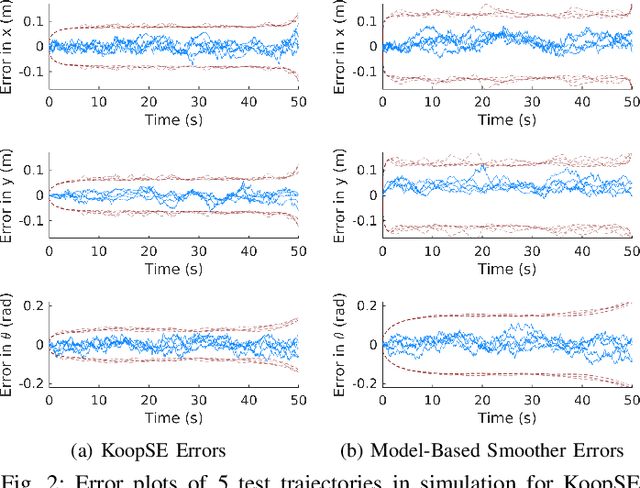
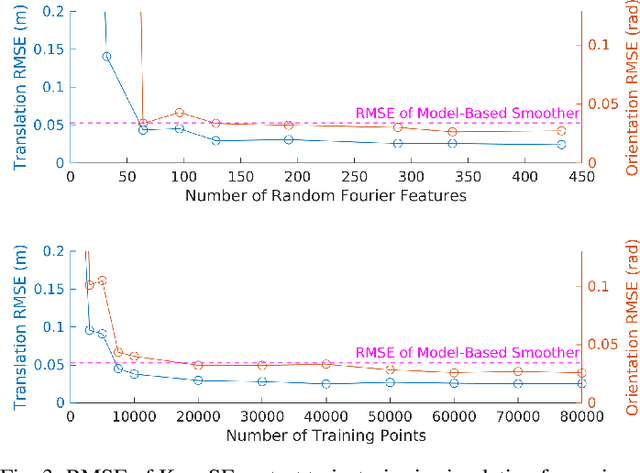
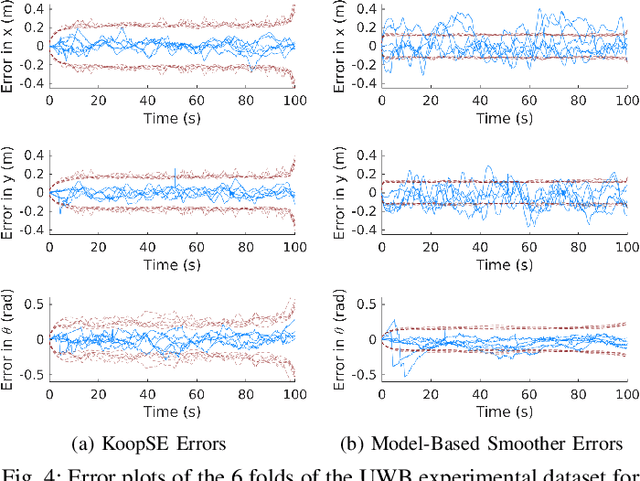
We present the Koopman State Estimator (KoopSE), a framework for model-free batch state estimation of control-affine systems that makes no linearization assumptions, requires no problem-specific feature selections, and has an inference computational cost that is independent of the number of training points. We lift the original nonlinear system into a higher-dimensional Reproducing Kernel Hilbert Space (RKHS), where the system becomes bilinear. The time-invariant model matrices can be learned by solving a least-squares problem on training trajectories. At test time, the system is algebraically manipulated into a linear time-varying system, where standard batch linear state estimation techniques can be used to efficiently compute state means and covariances. Random Fourier Features (RFF) are used to combine the computational efficiency of Koopman-based methods and the generality of kernel-embedding methods. KoopSE is validated experimentally on a localization task involving a mobile robot equipped with ultra-wideband receivers and wheel odometry. KoopSE estimates are more accurate and consistent than the standard model-based extended Rauch-Tung-Striebel (RTS) smoother, despite KoopSE having no prior knowledge of the system's motion or measurement models.
Near-linear Time Gaussian Process Optimization with Adaptive Batching and Resparsification
Feb 26, 2020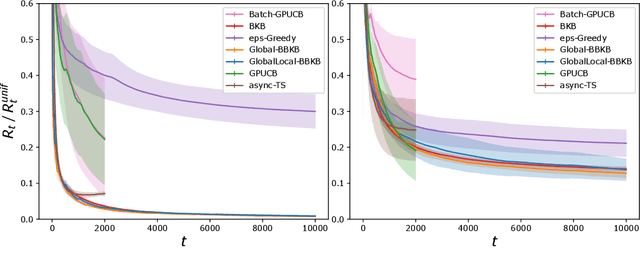
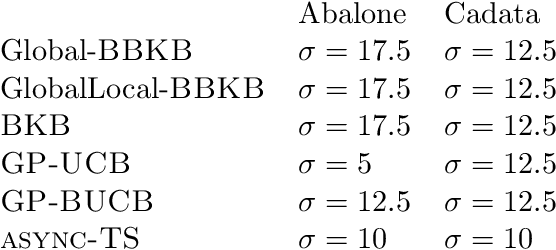
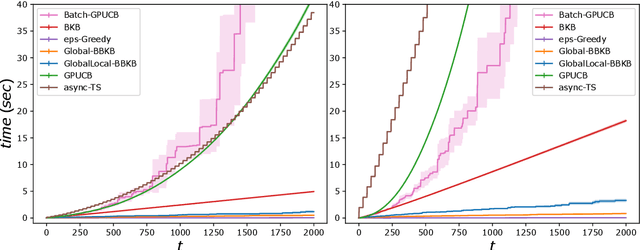
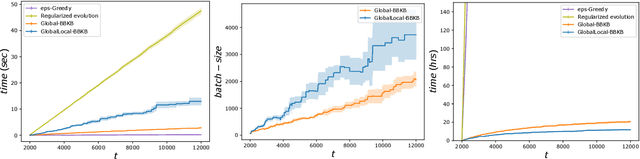
Gaussian processes (GP) are one of the most successful frameworks to model uncertainty. However, GP optimization (e.g., GP-UCB) suffers from major scalability issues. Experimental time grows linearly with the number of evaluations, unless candidates are selected in batches (e.g., using GP-BUCB) and evaluated in parallel. Furthermore, computational cost is often prohibitive since algorithms such as GP-BUCB require a time at least quadratic in the number of dimensions and iterations to select each batch. In this paper, we introduce BBKB (Batch Budgeted Kernel Bandits), the first no-regret GP optimization algorithm that provably runs in near-linear time and selects candidates in batches. This is obtained with a new guarantee for the tracking of the posterior variances that allows BBKB to choose increasingly larger batches, improving over GP-BUCB. Moreover, we show that the same bound can be used to adaptively delay costly updates to the sparse GP approximation used by BBKB, achieving a near-constant per-step amortized cost. These findings are then confirmed in several experiments, where BBKB is much faster than state-of-the-art methods.
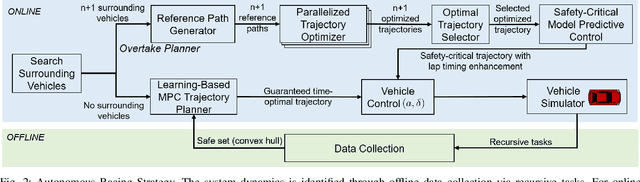
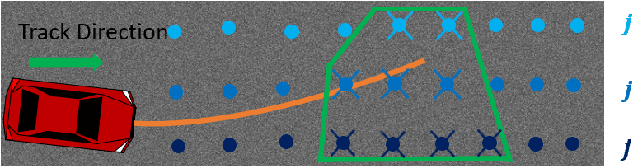
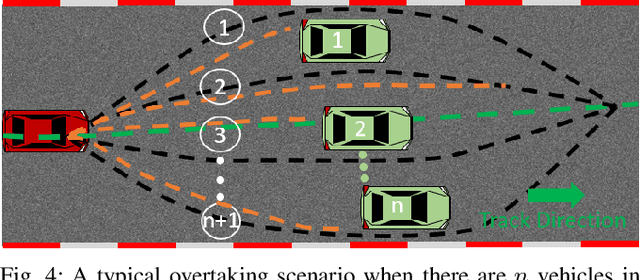
Competitive Car Racing with Multiple Vehicles using a Parallelized Optimization with Safety Guarantee
Dec 13, 2021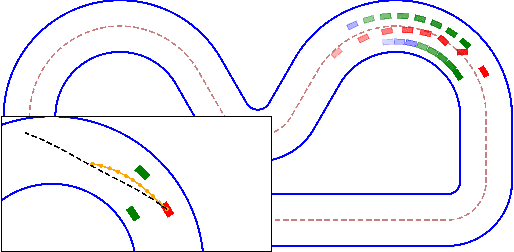
This paper presents a novel planning and control strategy for competing with multiple vehicles in a car racing scenario. The proposed racing strategy switches between two modes. When there are no surrounding vehicles, a learning-based model predictive control (MPC) trajectory planner is used to guarantee that the ego vehicle achieves better lap timing. When the ego vehicle is competing with other surrounding vehicles to overtake, an optimization-based planner generates multiple dynamically-feasible trajectories through parallel computation. Each trajectory is optimized under a MPC formulation with different homotopic Bezier-curve reference paths lying laterally between surrounding vehicles. The time-optimal trajectory among these different homotopic trajectories is selected and a low-level MPC controller with obstacle avoidance constraints is used to guarantee system safety-critical performance. The proposed algorithm has the capability to generate collision-free trajectories and track them while enhancing the lap timing performance with steady low computational complexity, outperforming existing approaches in both timing and performance for a car racing environment. To demonstrate the performance of our racing strategy, we simulate with multiple randomly generated moving vehicles on the track and test the ego vehicle's overtake maneuvers.