 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Review of Clustering Methods for Functional Data
Oct 03, 2022
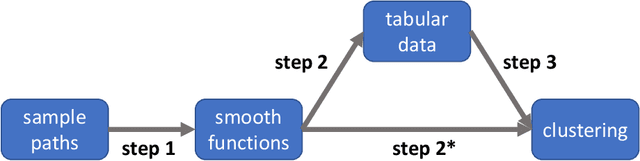
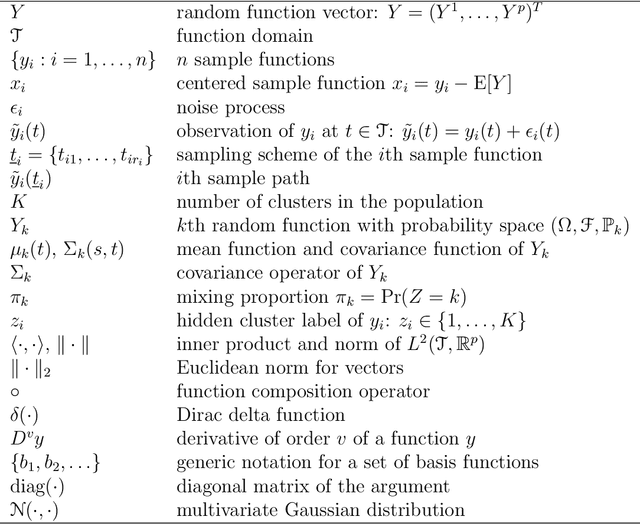
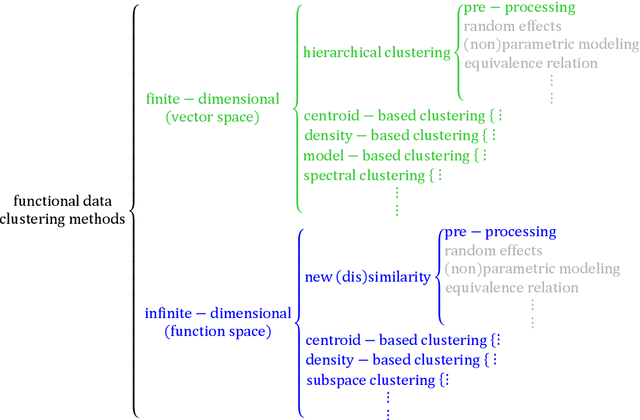
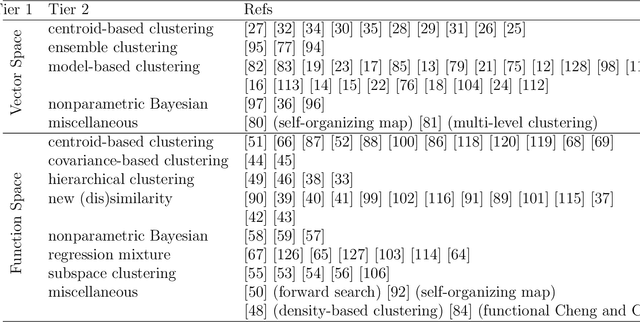
Functional data clustering is to identify heterogeneous morphological patterns in the continuous functions underlying the discrete measurements/observations. Application of functional data clustering has appeared in many publications across various fields of sciences, including but not limited to biology, (bio)chemistry, engineering, environmental science, medical science, psychology, social science, etc. The phenomenal growth of the application of functional data clustering indicates the urgent need for a systematic approach to develop efficient clustering methods and scalable algorithmic implementations. On the other hand, there is abundant literature on the cluster analysis of time series, trajectory data, spatio-temporal data, etc., which are all related to functional data. Therefore, an overarching structure of existing functional data clustering methods will enable the cross-pollination of ideas across various research fields. We here conduct a comprehensive review of original clustering methods for functional data. We propose a systematic taxonomy that explores the connections and differences among the existing functional data clustering methods and relates them to the conventional multivariate clustering methods. The structure of the taxonomy is built on three main attributes of a functional data clustering method and therefore is more reliable than existing categorizations. The review aims to bridge the gap between the functional data analysis community and the clustering community and to generate new principles for functional data clustering.
Diagnosis of Parkinson's Disease Based on Voice Signals Using SHAP and Hard Voting Ensemble Method
Oct 03, 2022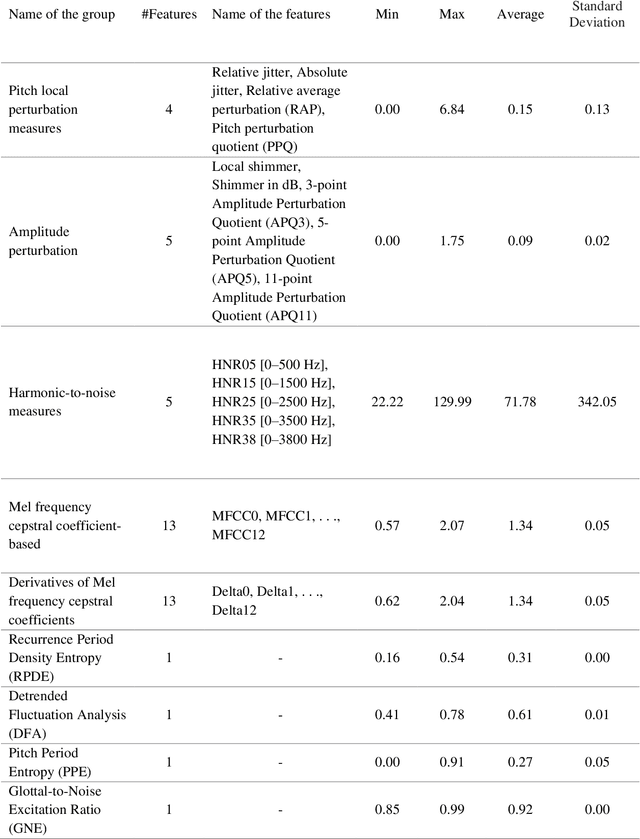
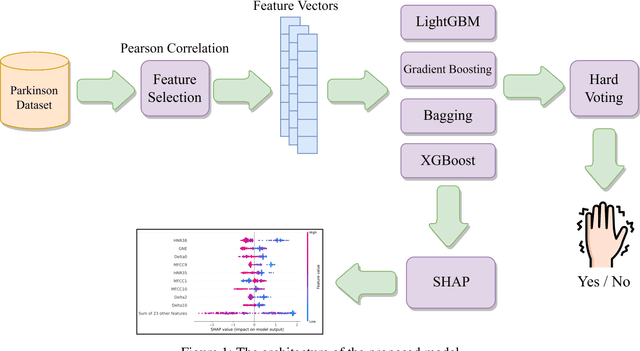
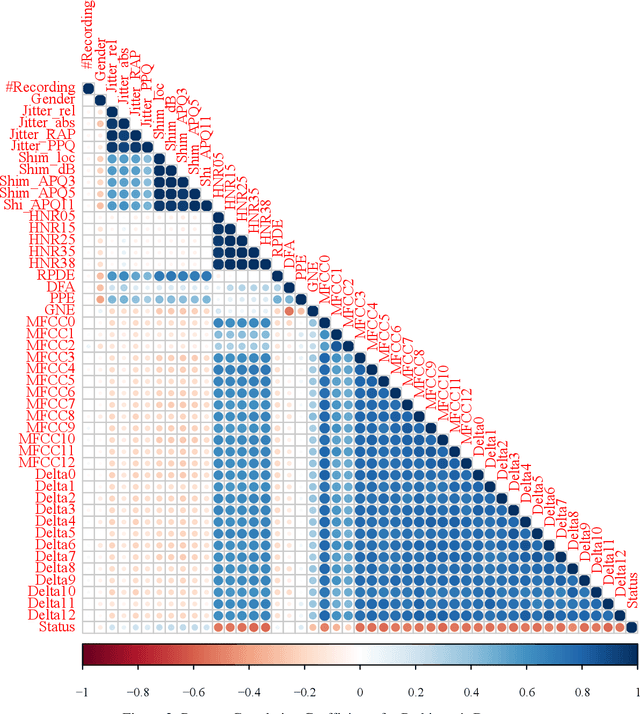

Background and Objective: Parkinson's disease (PD) is the second most common progressive neurological condition after Alzheimer's, characterized by motor and non-motor symptoms. Developing a method to diagnose the condition in its beginning phases is essential because of the significant number of individuals afflicting with this illness. PD is typically identified using motor symptoms or other Neuroimaging techniques, such as DATSCAN and SPECT. These methods are expensive, time-consuming, and unavailable to the general public; furthermore, they are not very accurate. These constraints encouraged us to develop a novel technique using SHAP and Hard Voting Ensemble Method based on voice signals. Methods: In this article, we used Pearson Correlation Coefficients to understand the relationship between input features and the output, and finally, input features with high correlation were selected. These selected features were classified by the Extreme Gradient Boosting (XGBoost), Light Gradient Boosting Machine (LightGBM), Gradient Boosting, and Bagging. Moreover, the Hard Voting Ensemble Method was determined based on the performance of the four classifiers. At the final stage, we proposed Shapley Additive exPlanations (SHAP) to rank the features according to their significance in diagnosing Parkinson's disease. Results and Conclusion: The proposed method achieved 85.42% accuracy, 84.94% F1-score, 86.77% precision, 87.62% specificity, and 83.20% sensitivity. The study's findings demonstrated that the proposed method outperformed state-of-the-art approaches and can assist physicians in diagnosing Parkinson's cases.
Force-Aware Interface via Electromyography for Natural VR/AR Interaction
Oct 03, 2022



While tremendous advances in visual and auditory realism have been made for virtual and augmented reality (VR/AR), introducing a plausible sense of physicality into the virtual world remains challenging. Closing the gap between real-world physicality and immersive virtual experience requires a closed interaction loop: applying user-exerted physical forces to the virtual environment and generating haptic sensations back to the users. However, existing VR/AR solutions either completely ignore the force inputs from the users or rely on obtrusive sensing devices that compromise user experience. By identifying users' muscle activation patterns while engaging in VR/AR, we design a learning-based neural interface for natural and intuitive force inputs. Specifically, we show that lightweight electromyography sensors, resting non-invasively on users' forearm skin, inform and establish a robust understanding of their complex hand activities. Fuelled by a neural-network-based model, our interface can decode finger-wise forces in real-time with 3.3% mean error, and generalize to new users with little calibration. Through an interactive psychophysical study, we show that human perception of virtual objects' physical properties, such as stiffness, can be significantly enhanced by our interface. We further demonstrate that our interface enables ubiquitous control via finger tapping. Ultimately, we envision our findings to push forward research towards more realistic physicality in future VR/AR.
Multi-Agent Chance-Constrained Stochastic Shortest Path with Application to Risk-Aware Intelligent Intersection
Oct 03, 2022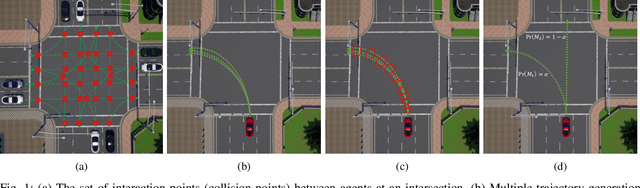
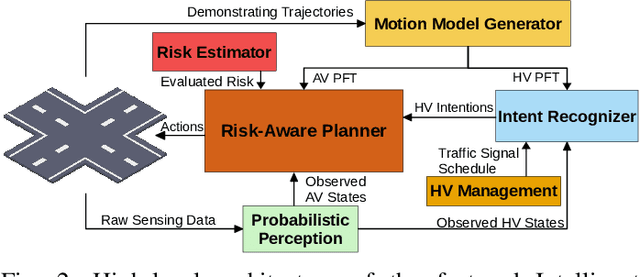
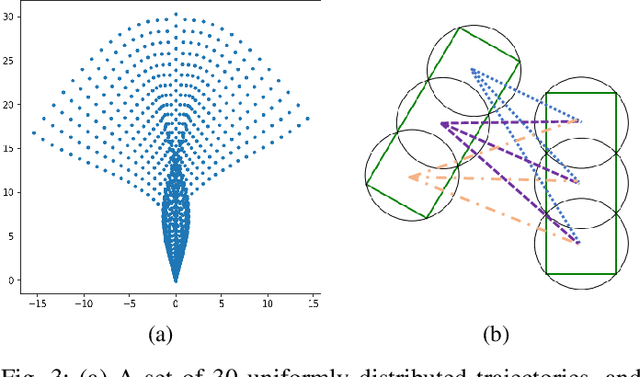
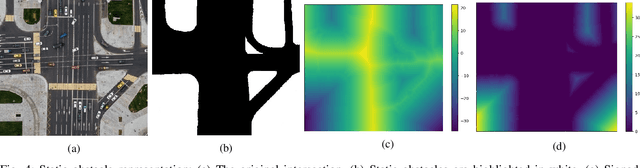
In transportation networks, where traffic lights have traditionally been used for vehicle coordination, intersections act as natural bottlenecks. A formidable challenge for existing automated intersections lies in detecting and reasoning about uncertainty from the operating environment and human-driven vehicles. In this paper, we propose a risk-aware intelligent intersection system for autonomous vehicles (AVs) as well as human-driven vehicles (HVs). We cast the problem as a novel class of Multi-agent Chance-Constrained Stochastic Shortest Path (MCC-SSP) problems and devise an exact Integer Linear Programming (ILP) formulation that is scalable in the number of agents' interaction points (e.g., potential collision points at the intersection). In particular, when the number of agents within an interaction point is small, which is often the case in intersections, the ILP has a polynomial number of variables and constraints. To further improve the running time performance, we show that the collision risk computation can be performed offline. Additionally, a trajectory optimization workflow is provided to generate risk-aware trajectories for any given intersection. The proposed framework is implemented in CARLA simulator and evaluated under a fully autonomous intersection with AVs only as well as in a hybrid setup with a signalized intersection for HVs and an intelligent scheme for AVs. As verified via simulations, the featured approach improves intersection's efficiency by up to $200\%$ while also conforming to the specified tunable risk threshold.
Improving Convolutional Neural Networks for Fault Diagnosis by Assimilating Global Features
Oct 03, 2022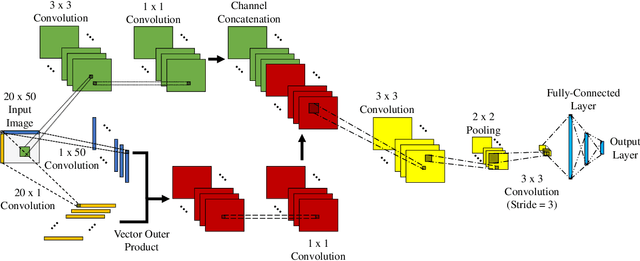
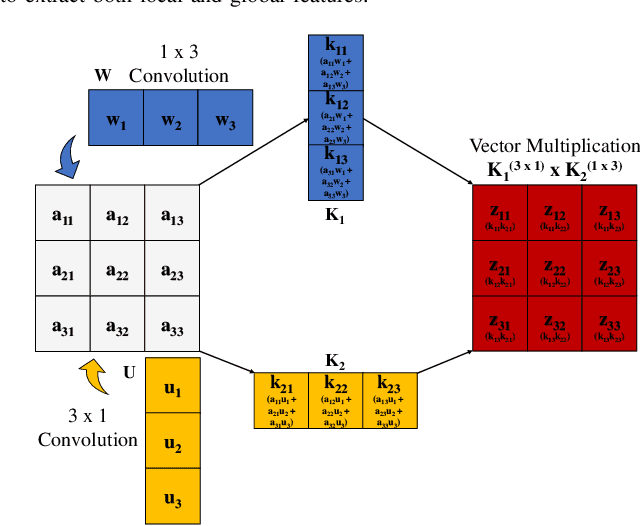
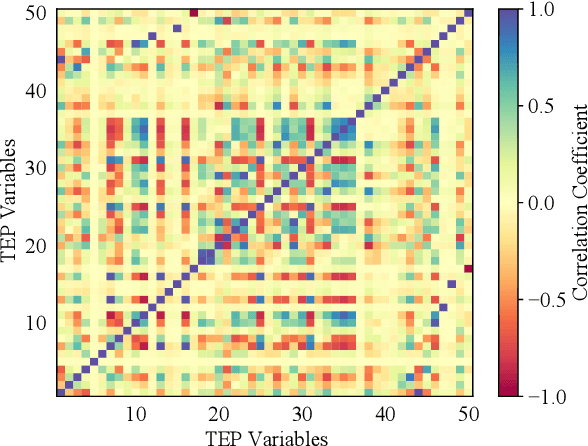
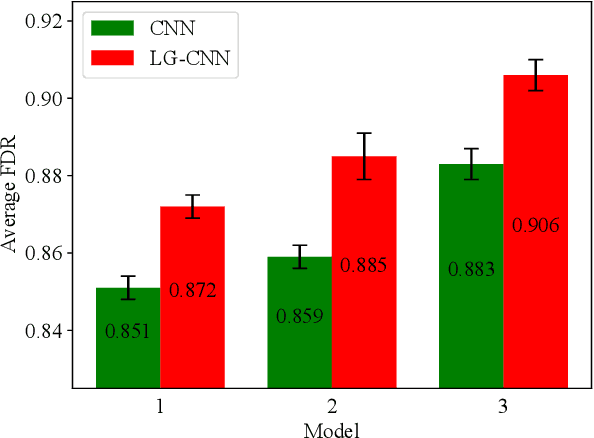
Deep learning techniques have become prominent in modern fault diagnosis for complex processes. In particular, convolutional neural networks (CNNs) have shown an appealing capacity to deal with multivariate time-series data by converting them into images. However, existing CNN techniques mainly focus on capturing local or multi-scale features from input images. A deep CNN is often required to indirectly extract global features, which are critical to describe the images converted from multivariate dynamical data. This paper proposes a novel local-global CNN (LG-CNN) architecture that directly accounts for both local and global features for fault diagnosis. Specifically, the local features are acquired by traditional local kernels whereas global features are extracted by using 1D tall and fat kernels that span the entire height and width of the image. Both local and global features are then merged for classification using fully-connected layers. The proposed LG-CNN is validated on the benchmark Tennessee Eastman process (TEP) dataset. Comparison with traditional CNN shows that the proposed LG-CNN can greatly improve the fault diagnosis performance without significantly increasing the model complexity. This is attributed to the much wider local receptive field created by the LG-CNN than that by CNN. The proposed LG-CNN architecture can be easily extended to other image processing and computer vision tasks.
The Long Tail of Context: Does it Exist and Matter?
Oct 03, 2022
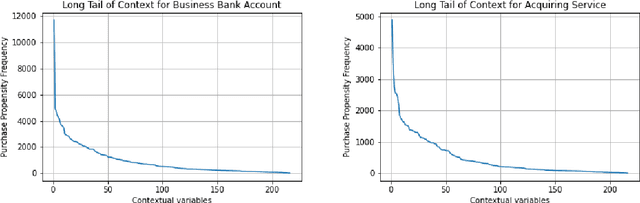
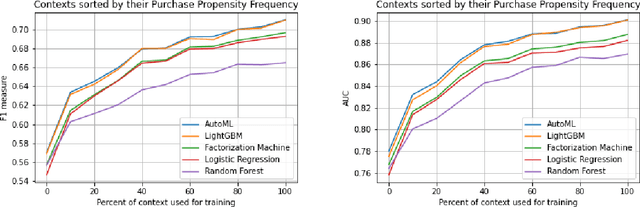
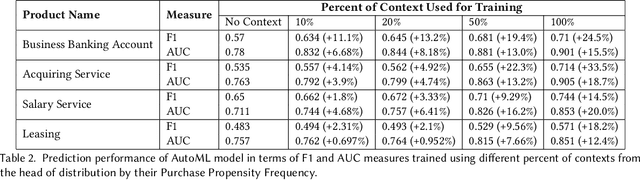
Context has been an important topic in recommender systems over the past two decades. A standard representational approach to context assumes that contextual variables and their structures are known in an application. Most of the prior CARS papers following representational approach manually selected and considered only a few crucial contextual variables in an application, such as time, location, and company of a person. This prior work demonstrated significant recommendation performance improvements when various CARS-based methods have been deployed in numerous applications. However, some recommender systems applications deal with a much bigger and broader types of contexts, and manually identifying and capturing a few contextual variables is not sufficient in such cases. In this paper, we study such ``context-rich'' applications dealing with a large variety of different types of contexts. We demonstrate that supporting only a few most important contextual variables, although useful, is not sufficient. In our study, we focus on the application that recommends various banking products to commercial customers within the context of dialogues initiated by customer service representatives. In this application, we managed to identify over two hundred types of contextual variables. Sorting those variables by their importance forms the Long Tail of Context (LTC). In this paper, we empirically demonstrate that LTC matters and using all these contextual variables from the Long Tail leads to significant improvements in recommendation performance.
Extrinsic calibration for highly accurate trajectories reconstruction
Oct 03, 2022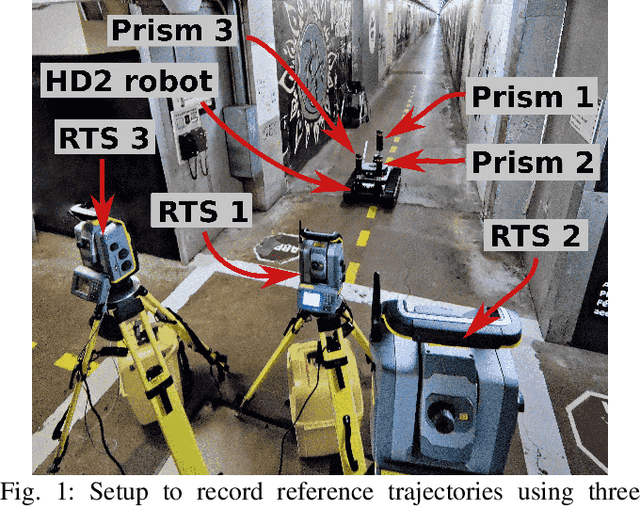
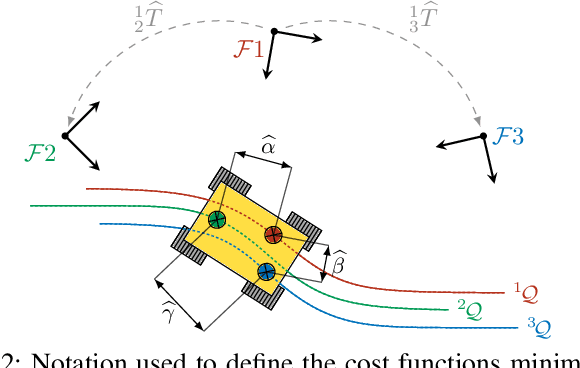

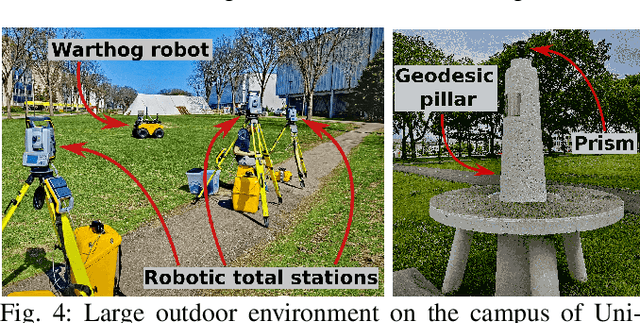
In the context of robotics, accurate ground-truth positioning is the cornerstone for the development of mapping and localization algorithms. In outdoor environments and over long distances, total stations provide accurate and precise measurements, that are unaffected by the usual factors that deteriorate the accuracy of Global Navigation Satellite System (GNSS). While a single robotic total station can track the position of a target in three Degrees Of Freedom (DOF), three robotic total stations and three targets are necessary to yield the full six DOF pose reference. Since it is crucial to express the position of targets in a common coordinate frame, we present a novel extrinsic calibration method of multiple robotic total stations with field deployment in mind. The proposed method does not require the manual collection of ground control points during the system setup, nor does it require tedious synchronous measurement on each robotic total station. Based on extensive experimental work, we compare our approach to the classical extrinsic calibration methods used in geomatics for surveying and demonstrate that our approach brings substantial time savings during the deployment. Tested on more than 30 km of trajectories, our new method increases the precision of the extrinsic calibration by 25 % compared to the best state-of-the-art method, which is the one taking manually static ground control points.
Radar Odometry on SE(3) with Constant Acceleration Motion Prior and Polar Measurement Model
Sep 11, 2022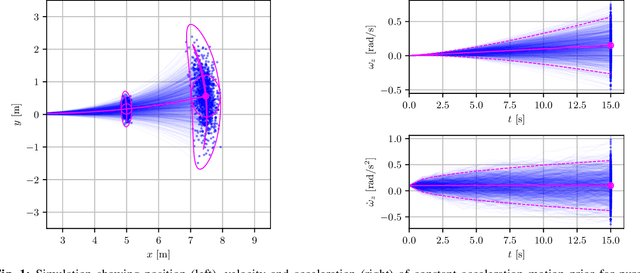
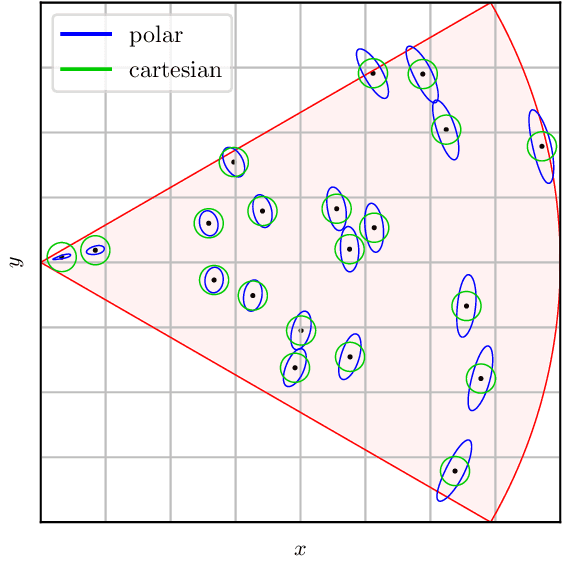
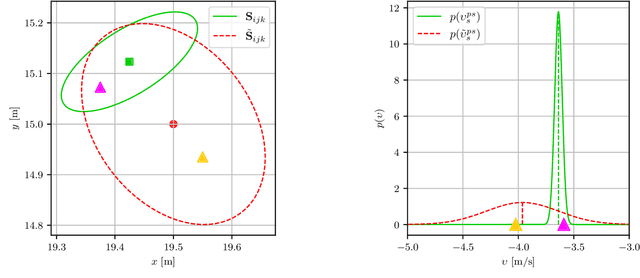
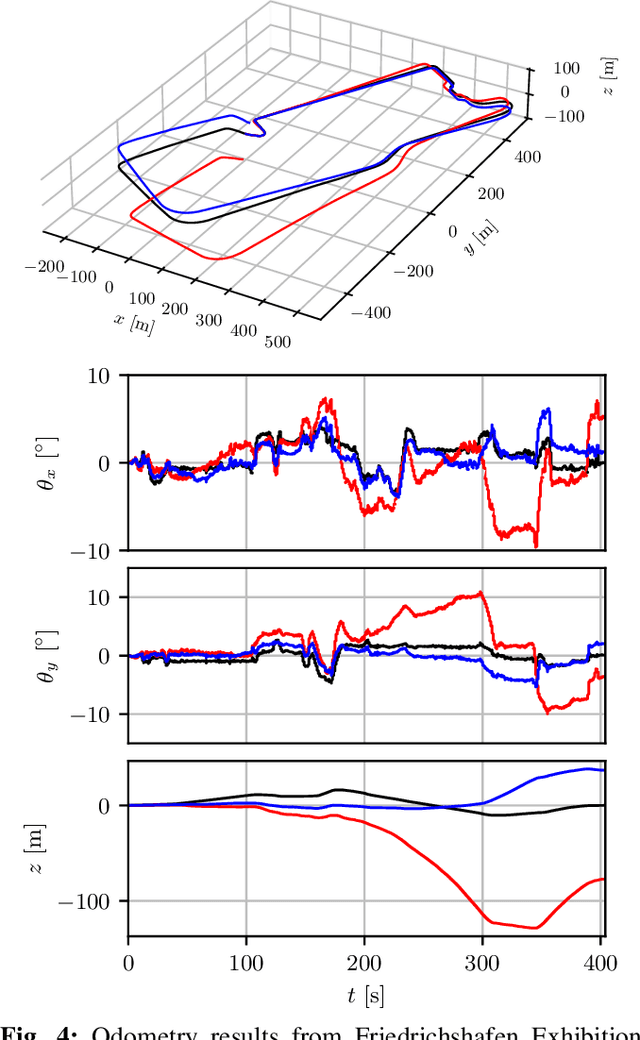
This paper presents an approach to radar odometry on $SE(3)$ which utilizes a constant acceleration motion prior. The motion prior is integrated into a sliding window optimization scheme. We use the Magnus expansion to accurately integrate the motion prior while maintaining real-time performance. In addition, we adopt a polar measurement model to better represent radar detection uncertainties. Our estimator is evaluated using a large real-world dataset from a prototype high-resolution radar sensor. The new motion prior and measurement model signifcantly improve odometry performance relative to the constant velocity motion prior and Cartesian measurement model from our previous work, particularly in roll, pitch and height.
$1D$ to $nD$: A Meta Algorithm for Multivariate Global Optimization via Univariate Optimizers
Sep 06, 2022In this work, we propose a meta algorithm that can solve a multivariate global optimization problem using univariate global optimizers. Although the univariate global optimization does not receive much attention compared to the multivariate case, which is more emphasized in academia and industry; we show that it is still relevant and can be directly used to solve problems of multivariate optimization. We also provide the corresponding regret bounds in terms of the time horizon $T$ and the average regret of the univariate optimizer, when it is robust against nonnegative noises with robust regret guarantees.
LL-GNN: Low Latency Graph Neural Networks on FPGAs for Particle Detectors
Oct 11, 2022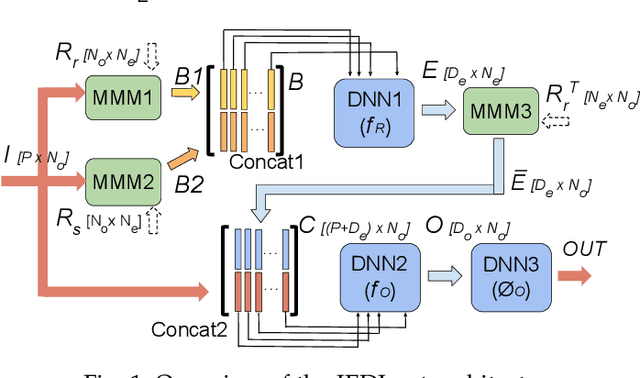
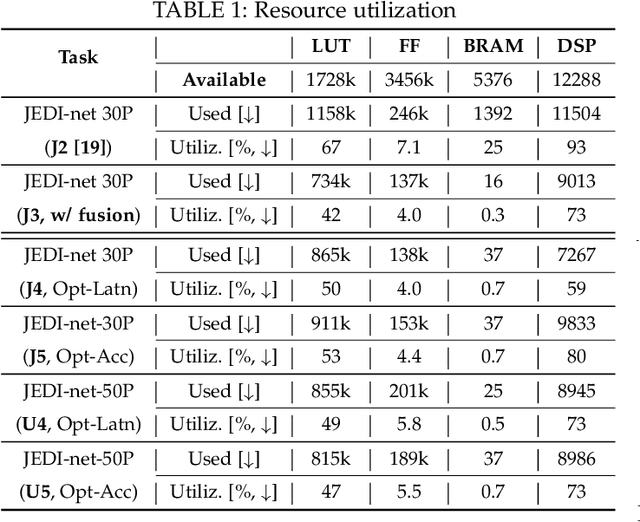
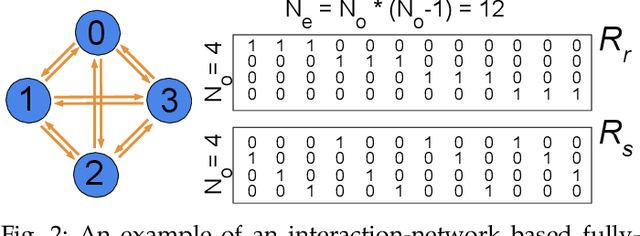
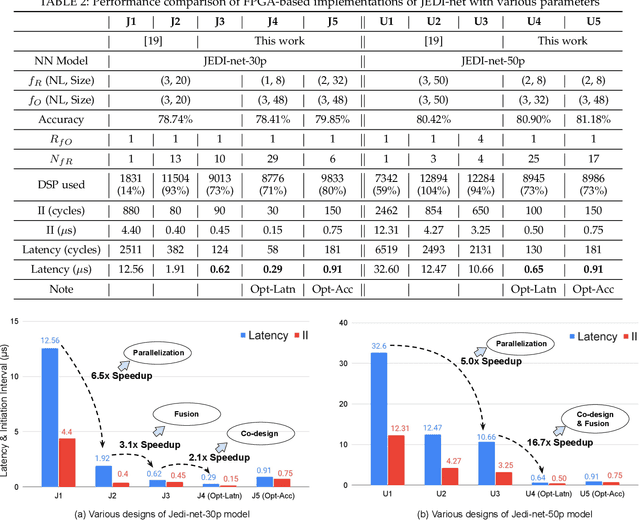
This work proposes a novel reconfigurable architecture for low latency Graph Neural Network (GNN) design specifically for particle detectors. Adopting FPGA-based GNNs for particle detectors is challenging since it requires sub-microsecond latency to deploy the networks for online event selection in the Level-1 triggers for the CERN Large Hadron Collider experiments. This paper proposes a custom code transformation with strength reduction for the matrix multiplication operations in the interaction-network based GNNs with fully connected graphs, which avoids the costly multiplication. It exploits sparsity patterns as well as binary adjacency matrices, and avoids irregular memory access, leading to a reduction in latency and improvement in hardware efficiency. In addition, we introduce an outer-product based matrix multiplication approach which is enhanced by the strength reduction for low latency design. Also, a fusion step is introduced to further reduce the design latency. Furthermore, an GNN-specific algorithm-hardware co-design approach is presented which not only finds a design with a much better latency but also finds a high accuracy design under a given latency constraint. Finally, a customizable template for this low latency GNN hardware architecture has been designed and open-sourced, which enables the generation of low-latency FPGA designs with efficient resource utilization using a high-level synthesis tool. Evaluation results show that our FPGA implementation is up to 24 times faster and consumes up to 45 times less power than a GPU implementation. Compared to our previous FPGA implementations, this work achieves 6.51 to 16.7 times lower latency. Moreover, the latency of our FPGA design is sufficiently low to enable deployment of GNNs in a sub-microsecond, real-time collider trigger system, enabling it to benefit from improved accuracy.