 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
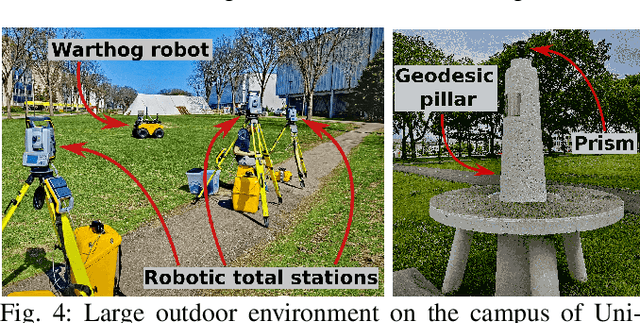
Add to EdgeRTS-GT: Robotic Total Stations Ground Truthing dataset
Sep 21, 2023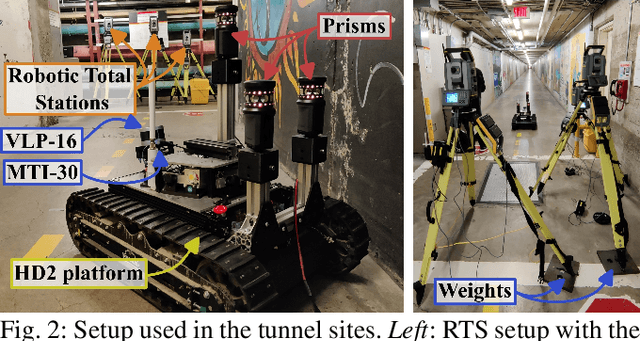

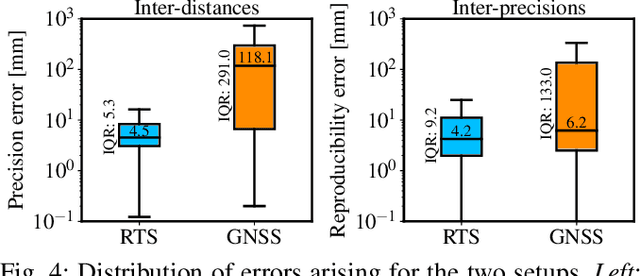

Numerous datasets and benchmarks exist to assess and compare Simultaneous Localization and Mapping (SLAM) algorithms. Nevertheless, their precision must follow the rate at which SLAM algorithms improved in recent years. Moreover, current datasets fall short of comprehensive data-collection protocol for reproducibility and the evaluation of the precision or accuracy of the recorded trajectories. With this objective in mind, we proposed the Robotic Total Stations Ground Truthing dataset (RTS-GT) dataset to support localization research with the generation of six-Degrees Of Freedom (DOF) ground truth trajectories. This novel dataset includes six-DOF ground truth trajectories generated using a system of three Robotic Total Stations (RTSs) tracking moving robotic platforms. Furthermore, we compare the performance of the RTS-based system to a Global Navigation Satellite System (GNSS)-based setup. The dataset comprises around sixty experiments conducted in various conditions over a period of 17 months, and encompasses over 49 kilometers of trajectories, making it the most extensive dataset of RTS-based measurements to date. Additionally, we provide the precision of all poses for each experiment, a feature not found in the current state-of-the-art datasets. Our results demonstrate that RTSs provide measurements that are 22 times more stable than GNSS in various environmental settings, making them a valuable resource for SLAM benchmark development.
Benchmarking ground truth trajectories with robotic total stations
Sep 10, 2023Benchmarks stand as vital cornerstones in elevating SLAM algorithms within mobile robotics. Consequently, ensuring accurate and reproducible ground truth generation is vital for fair evaluation. A majority of outdoor ground truths are generated by GNSS, which can lead to discrepancies over time, especially in covered areas. However, research showed that RTS setups are more precise and can alternatively be used to generate these ground truths. In our work, we compare both RTS and GNSS systems' precision and repeatability through a set of experiments conducted weeks and months apart in the same area. We demonstrated that RTS setups give more reproducible results, with disparities having a median value of 8.6 mm compared to a median value of 10.6 cm coming from a GNSS setup. These results highlight that RTS can be considered to benchmark process for SLAM algorithms with higher precision.
Uncertainty analysis for accurate ground truth trajectories with robotic total stations
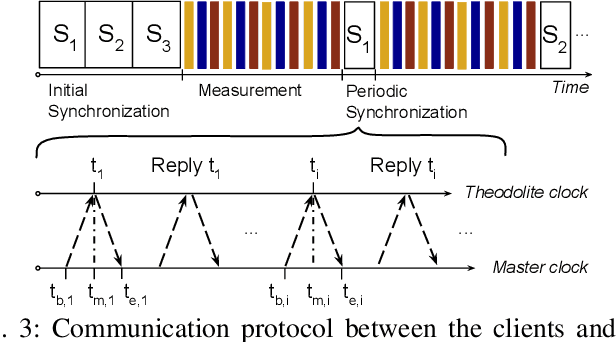
Aug 03, 2023In the context of robotics, accurate ground truth positioning is essential for the development of Simultaneous Localization and Mapping (SLAM) and control algorithms. Robotic Total Stations (RTSs) provide accurate and precise reference positions in different types of outdoor environments, especially when compared to the limited accuracy of Global Navigation Satellite System (GNSS) in cluttered areas. Three RTSs give the possibility to obtain the six-Degrees Of Freedom (DOF) reference pose of a robotic platform. However, the uncertainty of every pose is rarely computed for trajectory evaluation. As evaluation algorithms are getting increasingly precise, it becomes crucial to take into account this uncertainty. We propose a method to compute this six-DOF uncertainty from the fusion of three RTSs based on Monte Carlo (MC) methods. This solution relies on point-to-point minimization to propagate the noise of RTSs on the pose of the robotic platform. Five main noise sources are identified to model this uncertainty: noise inherent to the instrument, tilt noise, atmospheric factors, time synchronization noise, and extrinsic calibration noise. Based on extensive experimental work, we compare the impact of each noise source on the prism uncertainty and the final estimated pose. Tested on more than 50 km of trajectories, our comparison highlighted the importance of the calibration noise and the measurement distance, which should be ideally under 75 m. Moreover, it has been noted that the uncertainty on the pose of the robot is not prominently affected by one particular noise source, compared to the others.
Extrinsic calibration for highly accurate trajectories reconstruction
Oct 03, 2022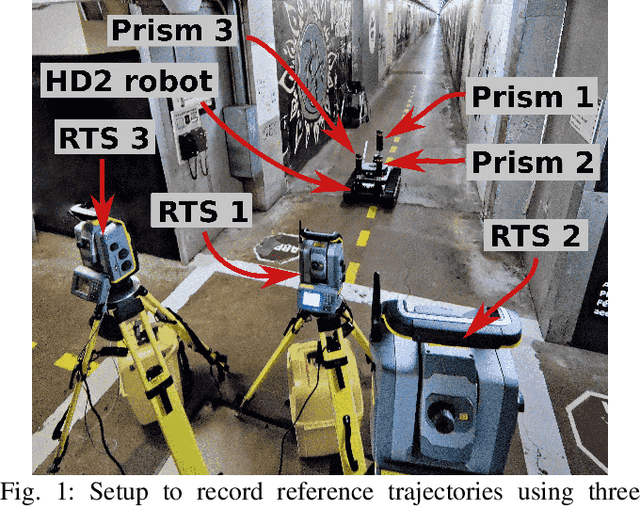
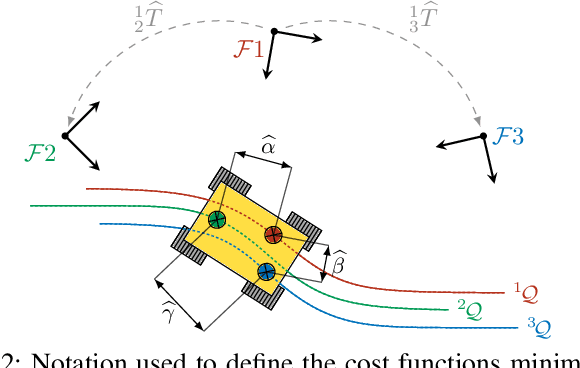

In the context of robotics, accurate ground-truth positioning is the cornerstone for the development of mapping and localization algorithms. In outdoor environments and over long distances, total stations provide accurate and precise measurements, that are unaffected by the usual factors that deteriorate the accuracy of Global Navigation Satellite System (GNSS). While a single robotic total station can track the position of a target in three Degrees Of Freedom (DOF), three robotic total stations and three targets are necessary to yield the full six DOF pose reference. Since it is crucial to express the position of targets in a common coordinate frame, we present a novel extrinsic calibration method of multiple robotic total stations with field deployment in mind. The proposed method does not require the manual collection of ground control points during the system setup, nor does it require tedious synchronous measurement on each robotic total station. Based on extensive experimental work, we compare our approach to the classical extrinsic calibration methods used in geomatics for surveying and demonstrate that our approach brings substantial time savings during the deployment. Tested on more than 30 km of trajectories, our new method increases the precision of the extrinsic calibration by 25 % compared to the best state-of-the-art method, which is the one taking manually static ground control points.
Gravity-constrained point cloud registration
Mar 25, 2022


Visual and lidar Simultaneous Localization and Mapping (SLAM) algorithms benefit from the Inertial Measurement Unit (IMU) modality. The high-rate inertial data complement the other lower-rate modalities. Moreover, in the absence of constant acceleration, the gravity vector makes two attitude angles out of three observable in the global coordinate frame. In visual odometry, this is already being used to reduce the 6-Degrees Of Freedom (DOF) pose estimation problem to 4-DOF. In lidar SLAM, the gravity measurements are often used as a penalty in the back-end global map optimization to prevent map deformations. In this work, we propose an Iterative Closest Point (ICP)-based front-end which exploits the observable DOF and provides pose estimates aligned with the gravity vector. We believe that this front-end has the potential to support the loop closure identification, thus speeding up convergences of global map optimizations. The presented approach has been extensively tested in large-scale outdoor environments as well as in the Subterranean Challenge organized by Defense Advanced Research Projects Agency (DARPA). We show that it can reduce the localization drift by 30% when compared to the standard 6-DOF ICP. Moreover, the code is readily available to the community as a part of the libpointmatcher library.
Kilometer-scale autonomous navigation in subarctic forests: challenges and lessons learned
Nov 27, 2021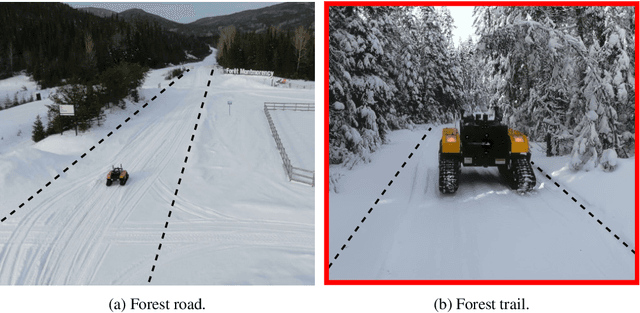
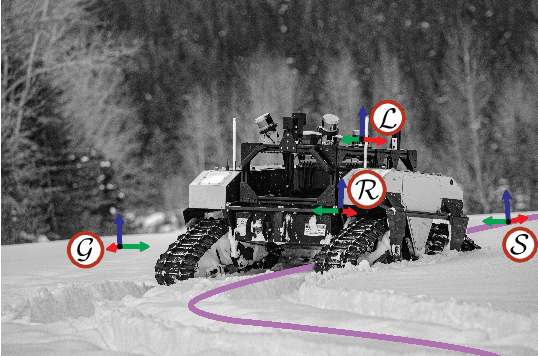
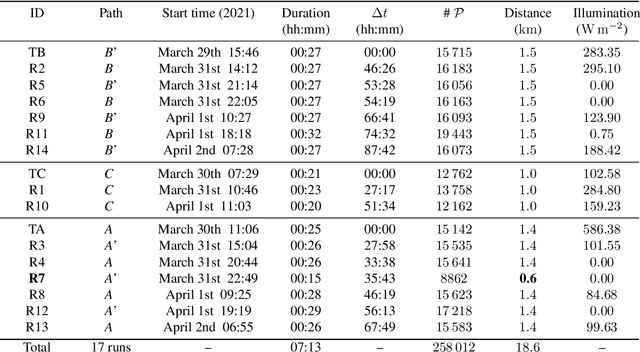
Challenges inherent to autonomous wintertime navigation in forests include lack of reliable a Global Navigation Satellite System (GNSS) signal, low feature contrast, high illumination variations and changing environment. This type of off-road environment is an extreme case of situations autonomous cars could encounter in northern regions. Thus, it is important to understand the impact of this harsh environment on autonomous navigation systems. To this end, we present a field report analyzing teach-and-repeat navigation in a subarctic region while subject to large variations of meteorological conditions. First, we describe the system, which relies on point cloud registration to localize a mobile robot through a boreal forest, while simultaneously building a map. We experimentally evaluate this system in over 18.6 km of autonomous navigation in the teach-and-repeat mode. We show that dense vegetation perturbs the GNSS signal, rendering it unsuitable for navigation in forest trails. Furthermore, we highlight the increased uncertainty related to localizing using point cloud registration in forest corridors. We demonstrate that it is not snow precipitation, but snow accumulation that affects our system's ability to localize within the environment. Finally, we expose some lessons learned and challenges from our field campaign to support better experimental work in winter conditions.
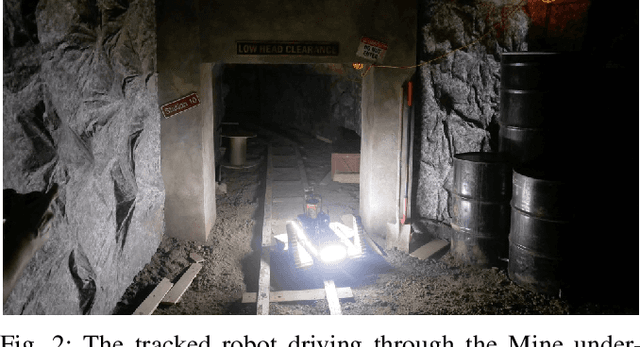
System for multi-robotic exploration of underground environments CTU-CRAS-NORLAB in the DARPA Subterranean Challenge
Oct 12, 2021
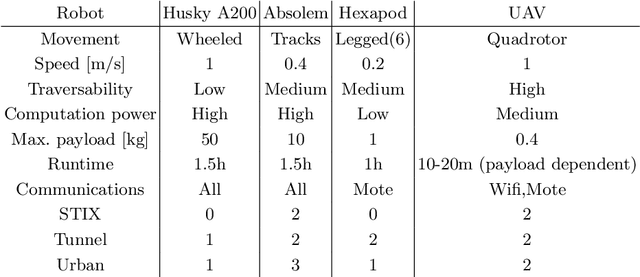
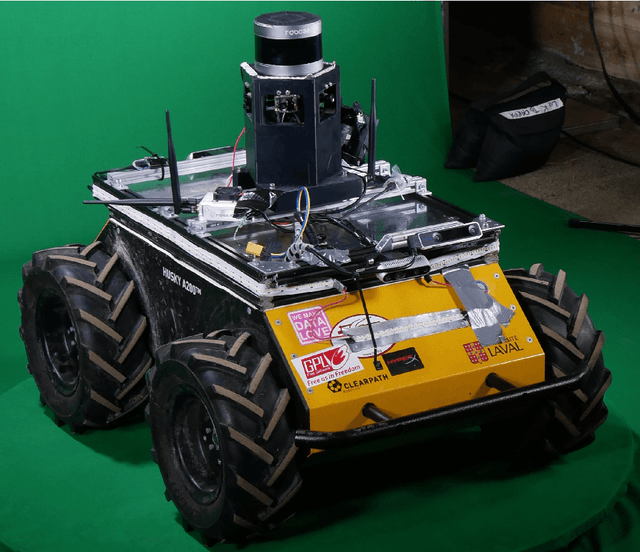
We present a field report of CTU-CRAS-NORLAB team from the Subterranean Challenge (SubT) organised by the Defense Advanced Research Projects Agency (DARPA). The contest seeks to advance technologies that would improve the safety and efficiency of search-and-rescue operations in GPS-denied environments. During the contest rounds, teams of mobile robots have to find specific objects while operating in environments with limited radio communication, e.g. mining tunnels, underground stations or natural caverns. We present a heterogeneous exploration robotic system of the CTU-CRAS-NORLAB team, which achieved the third rank at the SubT Tunnel and Urban Circuit rounds and surpassed the performance of all other non-DARPA-funded teams. The field report describes the team's hardware, sensors, algorithms and strategies, and discusses the lessons learned by participating at the DARPA SubT contest.
Accurate outdoor ground truth based on total stations
Apr 29, 2021
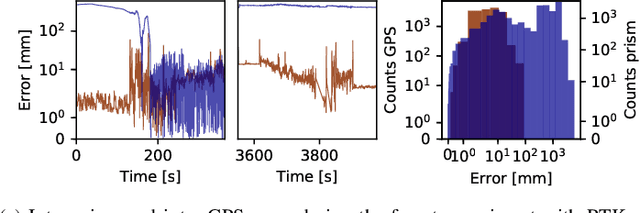
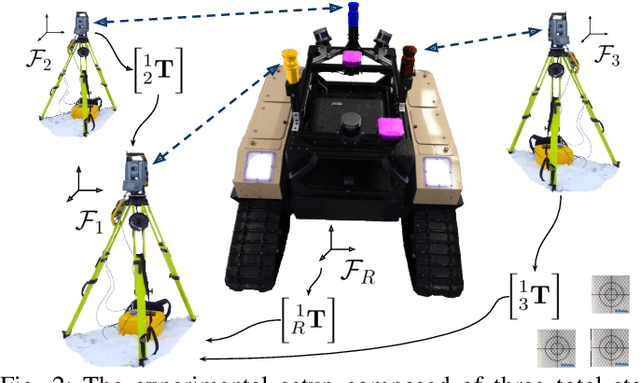
In robotics, accurate ground-truth position fostered the development of mapping and localization algorithms through the creation of cornerstone datasets. In outdoor environments and over long distances, total stations are the most accurate and precise measurement instruments for this purpose. Most total station-based systems in the literature are limited to three Degrees Of Freedoms (DOFs), due to the use of a single-prism tracking approach. In this paper, we present preliminary work on measuring a full pose of a vehicle, bringing the referencing system to six DOFs. Three total stations are used to track in real time three prisms attached to a target platform. We describe the structure of the referencing system and the protocol for acquiring the ground truth with this system. We evaluated its precision in a variety of different outdoor environments, ranging from open-sky to forest trails, and compare this system with another popular source of reference position, the Real Time Kinematics (RTK) positioning solution. Results show that our approach is the most precise, reaching an average positional error of 10 mm and 0.6 deg. This difference in performance was particularly stark in environments where Global Navigation Satellite System (GNSS) signals can be weaker due to overreaching vegetation.
Improving the Iterative Closest Point Algorithm using Lie Algebra
Oct 21, 2020
Mapping algorithms that rely on registering point clouds inevitably suffer from local drift, both in localization and in the built map. Applications that require accurate maps, such as environmental monitoring, benefit from additional sensor modalities that reduce such drift. In our work, we target the family of mappers based on the Iterative Closest Point (ICP) algorithm which use additional orientation sources such as the Inertial Measurement Unit (IMU). We introduce a new angular penalty term derived from Lie algebra. Our formulation avoids the need for tuning arbitrary parameters. Orientation covariance is used instead, and the resulting error term fits into the ICP cost function minimization problem. Experiments performed on our own real-world data and on the KITTI dataset show consistent behavior while suppressing the effect of outlying IMU measurements. We further discuss promising experiments, which should lead to optimal combination of all error terms in the ICP cost function minimization problem, allowing us to smoothly combine the geometric and inertial information provided by robot sensors.
Evaluation of Skid-Steering Kinematic Models for Subarctic Environments
Apr 10, 2020
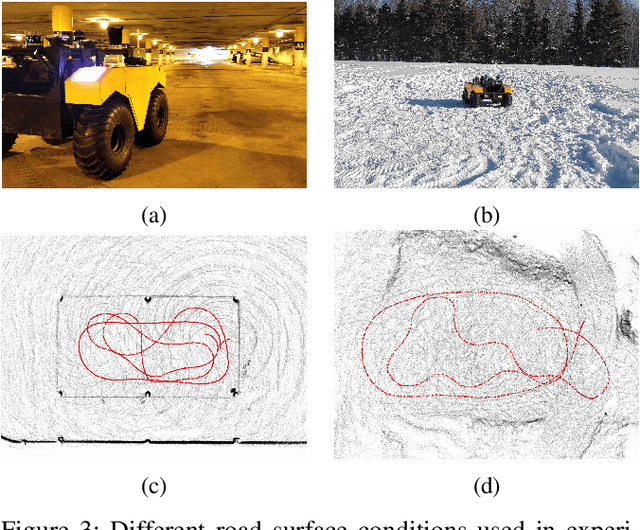
In subarctic and arctic areas, large and heavy skid-steered robots are preferred for their robustness and ability to operate on difficult terrain. State estimation, motion control and path planning for these robots rely on accurate odometry models based on wheel velocities. However, the state-of-the-art odometry models for skid-steer mobile robots (SSMRs) have usually been tested on relatively lightweight platforms. In this paper, we focus on how these models perform when deployed on a large and heavy (590 kg) SSMR. We collected more than 2 km of data on both snow and concrete. We compare the ideal differential-drive, extended differential-drive, radius-of-curvature-based, and full linear kinematic models commonly deployed for SSMRs. Each of the models is fine-tuned by searching their optimal parameters on both snow and concrete. We then discuss the relationship between the parameters, the model tuning, and the final accuracy of the models.