 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Agent Chance-Constrained Stochastic Shortest Path with Application to Risk-Aware Intelligent Intersection
Oct 03, 2022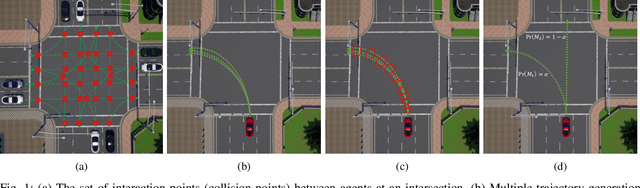
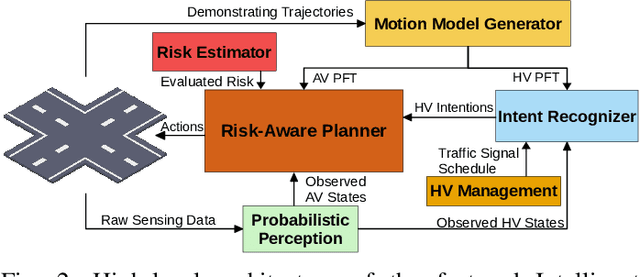
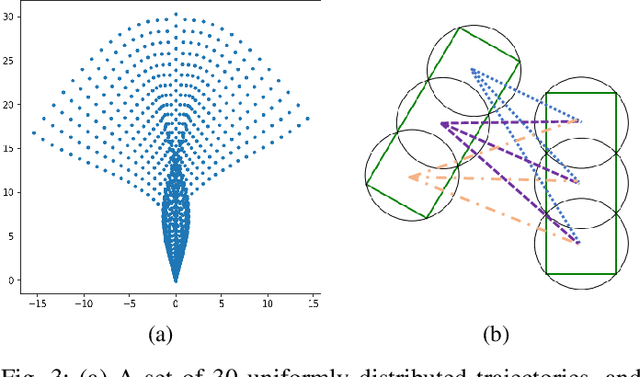
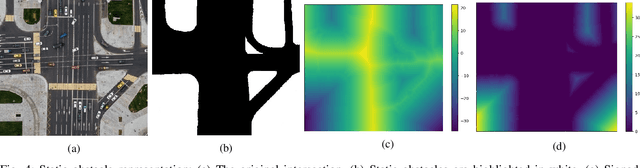
In transportation networks, where traffic lights have traditionally been used for vehicle coordination, intersections act as natural bottlenecks. A formidable challenge for existing automated intersections lies in detecting and reasoning about uncertainty from the operating environment and human-driven vehicles. In this paper, we propose a risk-aware intelligent intersection system for autonomous vehicles (AVs) as well as human-driven vehicles (HVs). We cast the problem as a novel class of Multi-agent Chance-Constrained Stochastic Shortest Path (MCC-SSP) problems and devise an exact Integer Linear Programming (ILP) formulation that is scalable in the number of agents' interaction points (e.g., potential collision points at the intersection). In particular, when the number of agents within an interaction point is small, which is often the case in intersections, the ILP has a polynomial number of variables and constraints. To further improve the running time performance, we show that the collision risk computation can be performed offline. Additionally, a trajectory optimization workflow is provided to generate risk-aware trajectories for any given intersection. The proposed framework is implemented in CARLA simulator and evaluated under a fully autonomous intersection with AVs only as well as in a hybrid setup with a signalized intersection for HVs and an intelligent scheme for AVs. As verified via simulations, the featured approach improves intersection's efficiency by up to $200\%$ while also conforming to the specified tunable risk threshold.
Hierarchical Constrained Stochastic Shortest Path Planning via Cost Budget Allocation
May 11, 2022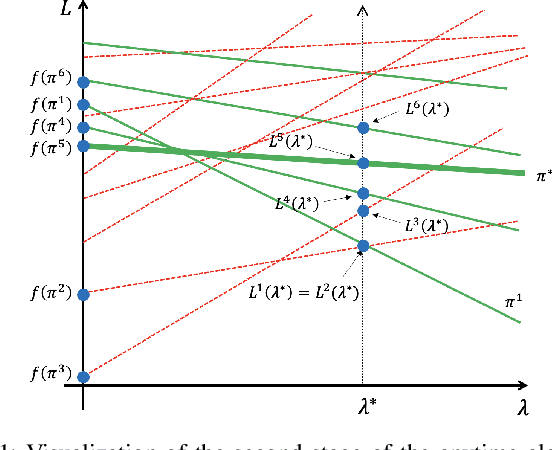
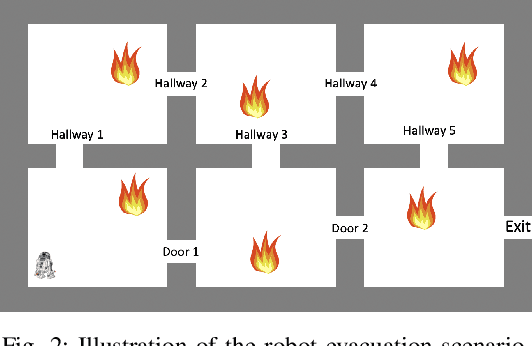
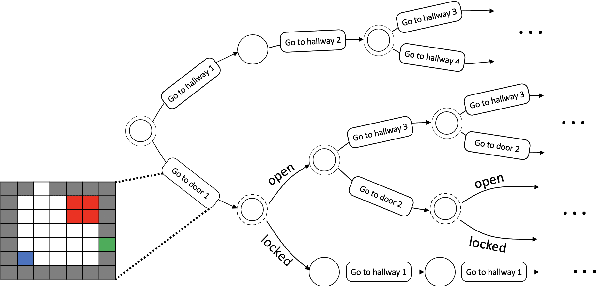
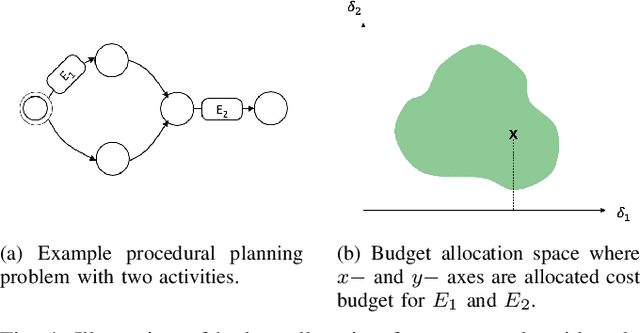
Stochastic sequential decision making often requires hierarchical structure in the problem where each high-level action should be further planned with primitive states and actions. In addition, many real-world applications require a plan that satisfies constraints on the secondary costs such as risk measure or fuel consumption. In this paper, we propose a hierarchical constrained stochastic shortest path problem (HC-SSP) that meets those two crucial requirements in a single framework. Although HC-SSP provides a useful framework to model such planning requirements in many real-world applications, the resulting problem has high complexity and makes it difficult to find an optimal solution fast which prevents user from applying it to real-time and risk-sensitive applications. To address this problem, we present an algorithm that iteratively allocates cost budget to lower level planning problems based on branch-and-bound scheme to find a feasible solution fast and incrementally update the incumbent solution. We demonstrate the proposed algorithm in an evacuation scenario and prove the advantage over a state-of-the-art mathematical programming based approach.
Online Risk-Bounded Motion Planning for Autonomous Vehicles in Dynamic Environments
Apr 04, 2019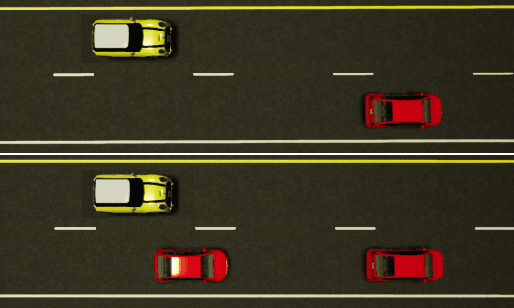
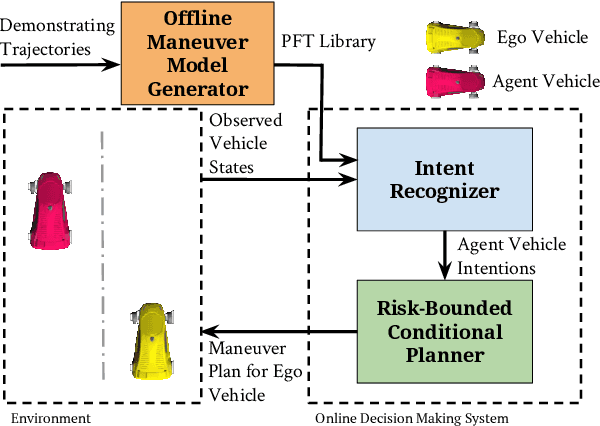
A crucial challenge to efficient and robust motion planning for autonomous vehicles is understanding the intentions of the surrounding agents. Ignoring the intentions of the other agents in dynamic environments can lead to risky or over-conservative plans. In this work, we model the motion planning problem as a partially observable Markov decision process (POMDP) and propose an online system that combines an intent recognition algorithm and a POMDP solver to generate risk-bounded plans for the ego vehicle navigating with a number of dynamic agent vehicles. The intent recognition algorithm predicts the probabilistic hybrid motion states of each agent vehicle over a finite horizon using Bayesian filtering and a library of pre-learned maneuver motion models. We update the POMDP model with the intent recognition results in real time and solve it using a heuristic search algorithm which produces policies with upper-bound guarantees on the probability of near colliding with other dynamic agents. We demonstrate that our system is able to generate better motion plans in terms of efficiency and safety in a number of challenging environments including unprotected intersection left turns and lane changes as compared to the baseline methods.