 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
Quantifying and Managing Impacts of Concept Drifts on IoT Traffic Inference in Residential ISP Networks
Jan 17, 2023
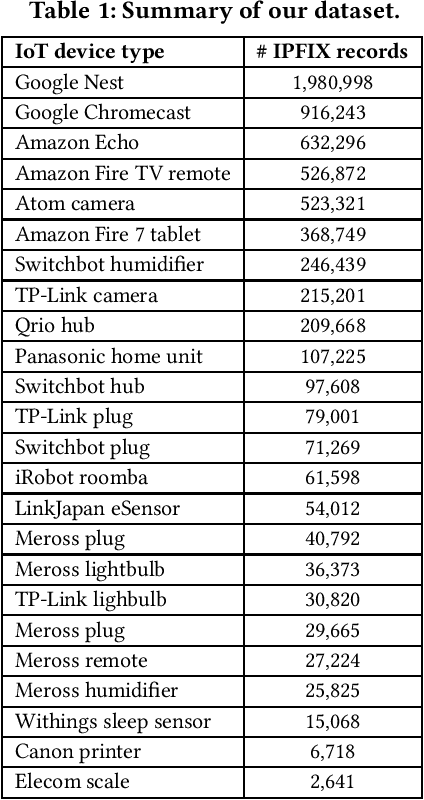
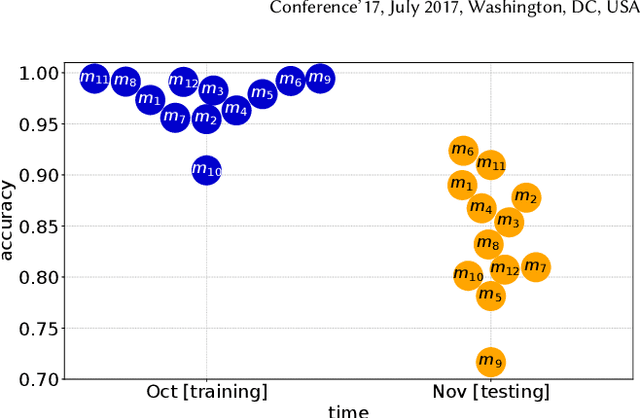
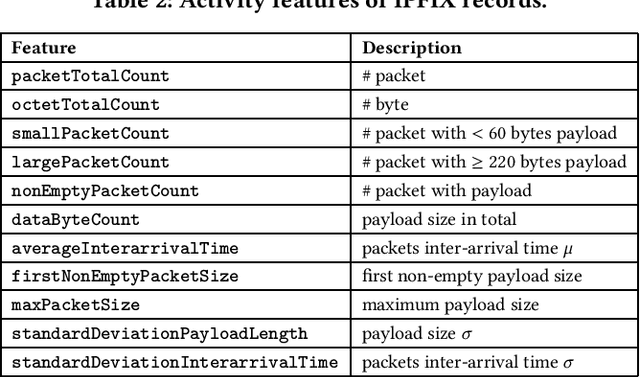
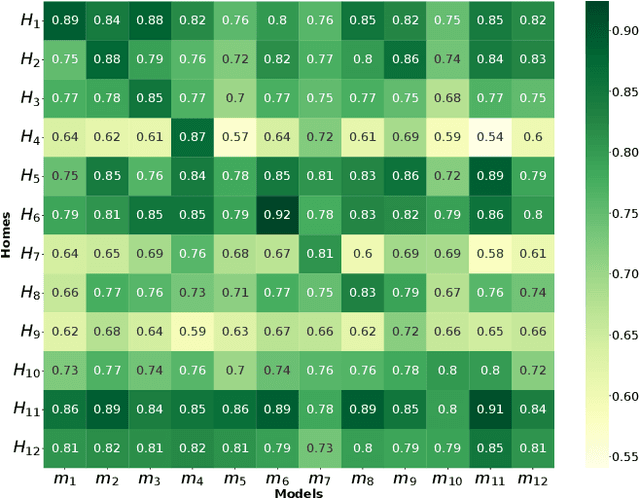
Millions of vulnerable consumer IoT devices in home networks are the enabler for cyber crimes putting user privacy and Internet security at risk. Internet service providers (ISPs) are best poised to play key roles in mitigating risks by automatically inferring active IoT devices per household and notifying users of vulnerable ones. Developing a scalable inference method that can perform robustly across thousands of home networks is a non-trivial task. This paper focuses on the challenges of developing and applying data-driven inference models when labeled data of device behaviors is limited and the distribution of data changes (concept drift) across time and space domains. Our contributions are three-fold: (1) We collect and analyze network traffic of 24 types of consumer IoT devices from 12 real homes over six weeks to highlight the challenge of temporal and spatial concept drifts in network behavior of IoT devices; (2) We analyze the performance of two inference strategies, namely "global inference" (a model trained on a combined set of all labeled data from training homes) and "contextualized inference" (several models each trained on the labeled data from a training home) in the presence of concept drifts; and (3) To manage concept drifts, we develop a method that dynamically applies the ``closest'' model (from a set) to network traffic of unseen homes during the testing phase, yielding better performance in 20% of scenarios.
RF Signal Source Search and Localization Using an Autonomous UAV with Predefined Waypoints
Jan 17, 2023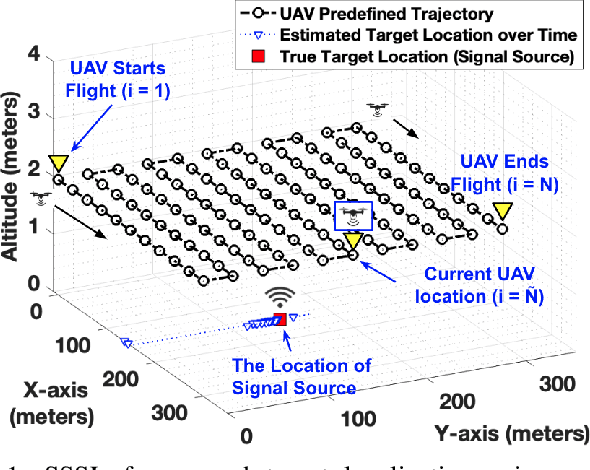
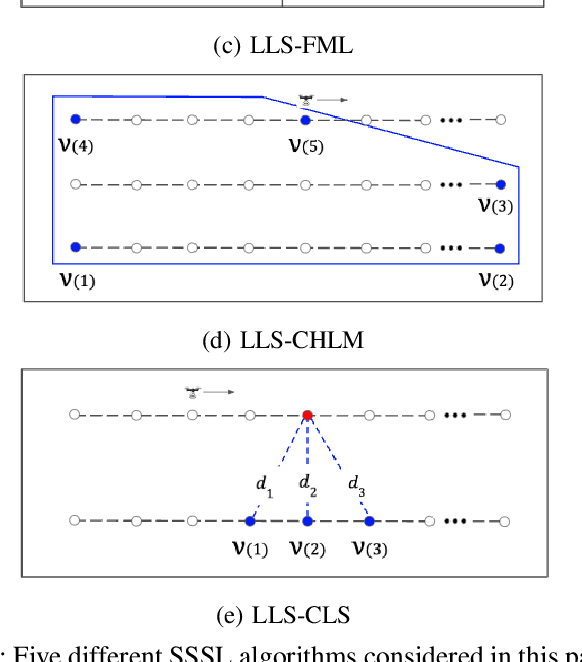
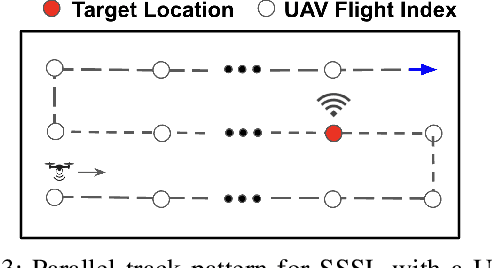
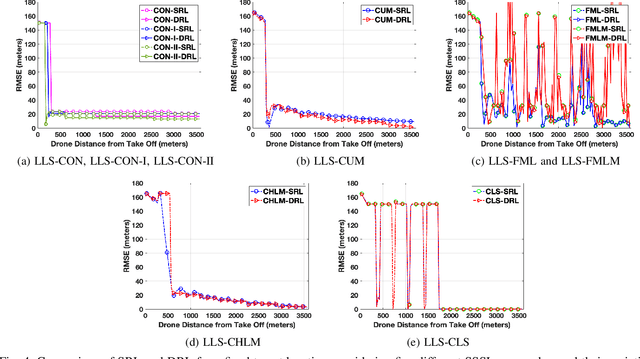
Localization of a radio frequency (RF) signal source has various use cases, ranging from search and rescue, identification and deactivation of jammers, and tracking hostile activity near borders or on the battlefield. The use of unmanned aerial vehicles (UAVs) for signal source search and localization (SSSL) can have significant advantages when compared to terrestrial-based approaches, due to the ease of capturing RF signals at higher altitudes and the autonomous 3D navigation capabilities of UAVs. However, the limited flight duration of UAVs due to battery constraints, as well as limited computational resources on board of lightweight UAVs introduce challenges for SSSL. In this paper, we study various SSSL techniques using a UAV with predefined waypoints. A linear least square (LLS) based localization scheme is considered with enhanced reference selection due to its relatively lower computational complexity. Five different LLS localization algorithms are proposed and studied for selecting anchor positions to be used for localization as the UAV navigates through an area. The performance of each algorithm is measured in two ways: 1) real-time positioning accuracy during the ongoing UAV flight, and 2) long-term accuracy measured at the end of the UAV flight. We compare and analyze the performance of the proposed approaches using computer simulations in terms of accuracy, UAV flight distance, and reliability.
Event-based Shape from Polarization
Jan 17, 2023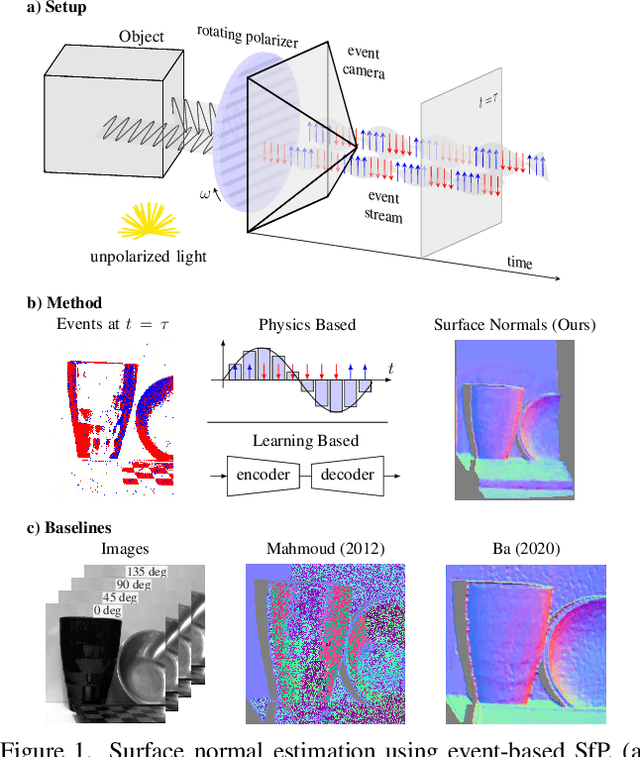
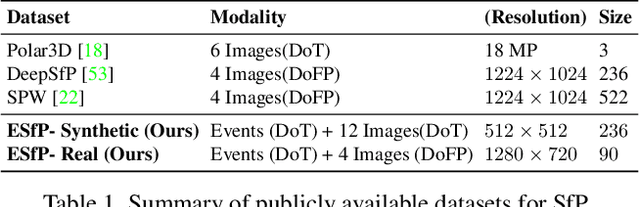
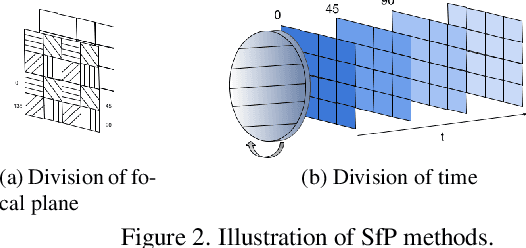
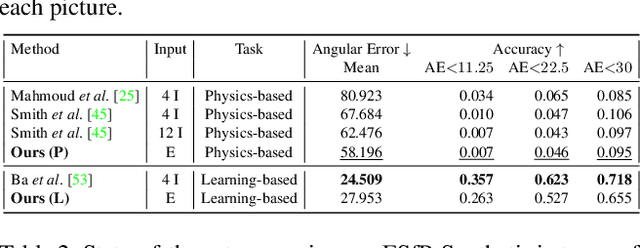
State-of-the-art solutions for Shape-from-Polarization (SfP) suffer from a speed-resolution tradeoff: they either sacrifice the number of polarization angles measured or necessitate lengthy acquisition times due to framerate constraints, thus compromising either accuracy or latency. We tackle this tradeoff using event cameras. Event cameras operate at microseconds resolution with negligible motion blur, and output a continuous stream of events that precisely measures how light changes over time asynchronously. We propose a setup that consists of a linear polarizer rotating at high-speeds in front of an event camera. Our method uses the continuous event stream caused by the rotation to reconstruct relative intensities at multiple polarizer angles. Experiments demonstrate that our method outperforms physics-based baselines using frames, reducing the MAE by 25% in synthetic and real-world dataset. In the real world, we observe, however, that the challenging conditions (i.e., when few events are generated) harm the performance of physics-based solutions. To overcome this, we propose a learning-based approach that learns to estimate surface normals even at low event-rates, improving the physics-based approach by 52% on the real world dataset. The proposed system achieves an acquisition speed equivalent to 50 fps (>twice the framerate of the commercial polarization sensor) while retaining the spatial resolution of 1MP. Our evaluation is based on the first large-scale dataset for event-based SfP
End-to-end Unsupervised Learning of Long-Term 3D Stable objects
Jan 09, 2023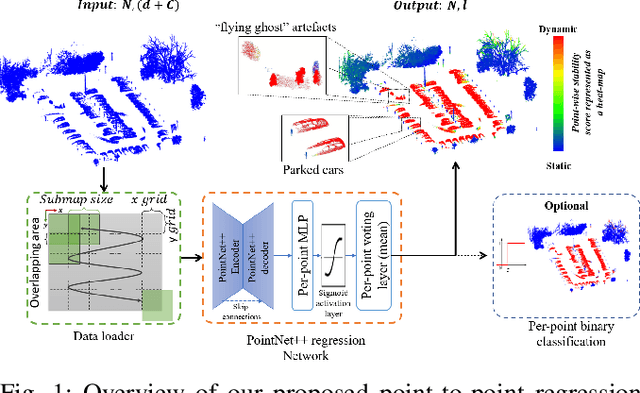
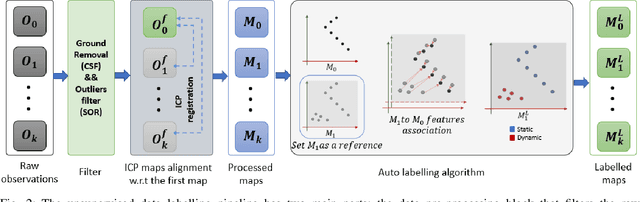
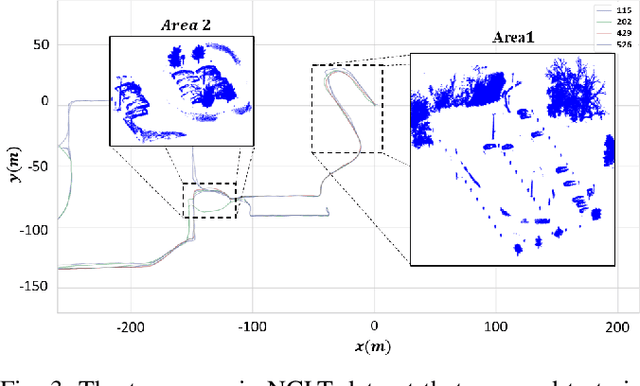
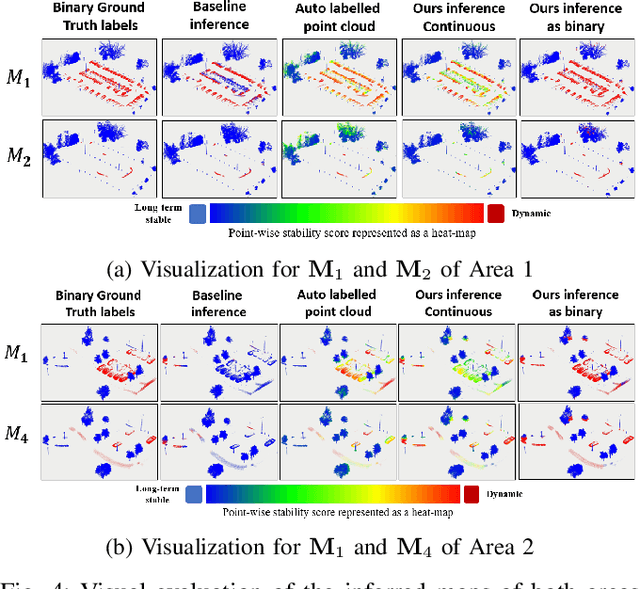
3D point cloud semantic classification is an important task in robotics as it enables a better understanding of the mapped environment. This work proposes to learn the long-term stability of the 3D objects using a neural network based on PointNet++, where the long-term stable object refers to a static object that cannot move on its own (e.g. tree, pole, building). The training data is generated in an unsupervised manner by assigning a continuous label to individual points by exploiting multiple time slices of the same environment. Instead of using discrete labels, i.e. static/dynamic, we propose to use a continuous label value indicating point temporal stability to train a regression PointNet++ network. We evaluated our approach on point cloud data of two parking lots from the NCLT dataset. The experiments' performance reveals that static vs dynamic object classification is best performed by training a regression model, followed by thresholding, compared to directly training a classification model.
Asynchronous Hybrid Reinforcement Learning for Latency and Reliability Optimization in the Metaverse over Wireless Communications
Dec 30, 2022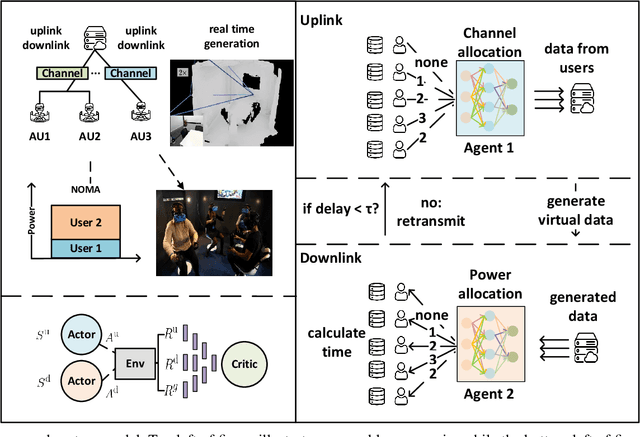
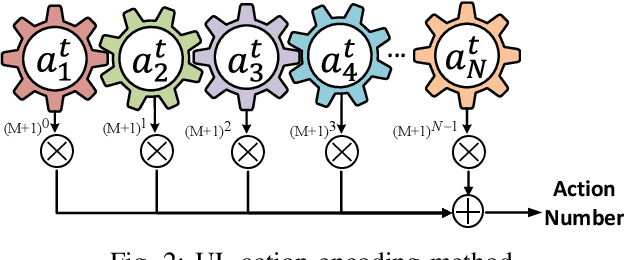
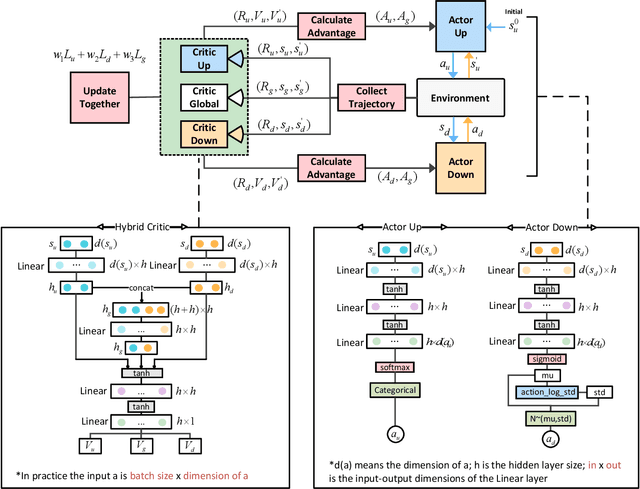
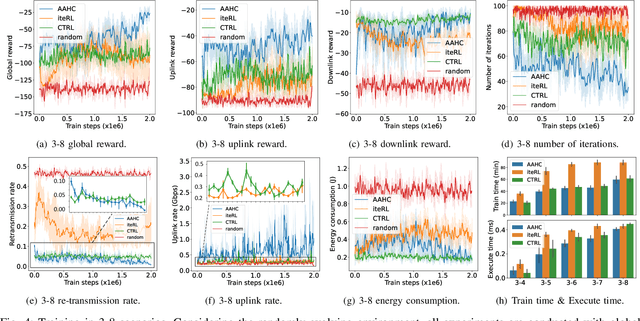
Technology advancements in wireless communications and high-performance Extended Reality (XR) have empowered the developments of the Metaverse. The demand for Metaverse applications and hence, real-time digital twinning of real-world scenes is increasing. Nevertheless, the replication of 2D physical world images into 3D virtual world scenes is computationally intensive and requires computation offloading. The disparity in transmitted scene dimension (2D as opposed to 3D) leads to asymmetric data sizes in uplink (UL) and downlink (DL). To ensure the reliability and low latency of the system, we consider an asynchronous joint UL-DL scenario where in the UL stage, the smaller data size of the physical world scenes captured by multiple extended reality users (XUs) will be uploaded to the Metaverse Console (MC) to be construed and rendered. In the DL stage, the larger-size 3D virtual world scenes need to be transmitted back to the XUs. The decisions pertaining to computation offloading and channel assignment are optimized in the UL stage, and the MC will optimize power allocation for users assigned with a channel in the UL transmission stage. Some problems arise therefrom: (i) interactive multi-process chain, specifically Asynchronous Markov Decision Process (AMDP), (ii) joint optimization in multiple processes, and (iii) high-dimensional objective functions, or hybrid reward scenarios. To ensure the reliability and low latency of the system, we design a novel multi-agent reinforcement learning algorithm structure, namely Asynchronous Actors Hybrid Critic (AAHC). Extensive experiments demonstrate that compared to proposed baselines, AAHC obtains better solutions with preferable training time.
Similarity-Based Predictive Maintenance Framework for Rotating Machinery
Dec 30, 2022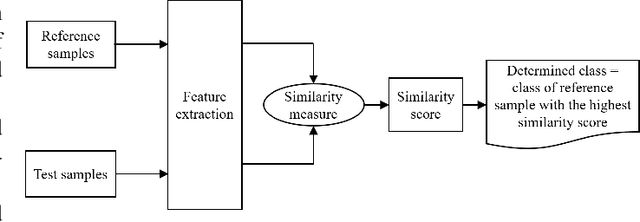
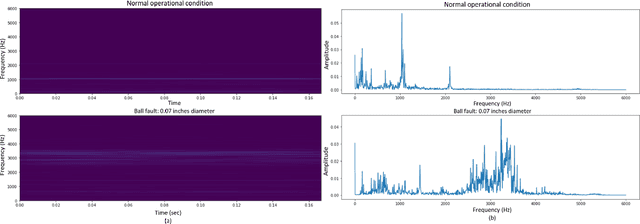
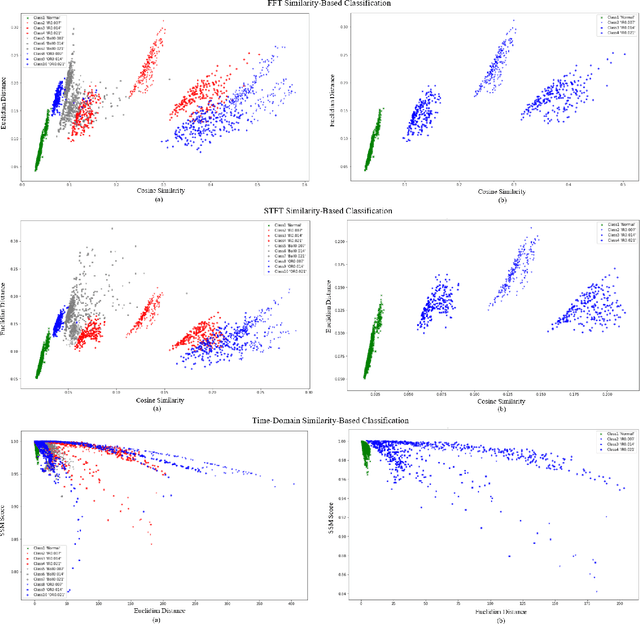
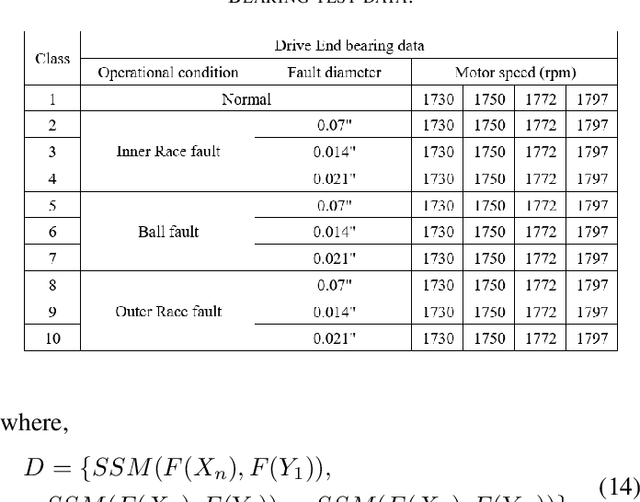
Within smart manufacturing, data driven techniques are commonly adopted for condition monitoring and fault diagnosis of rotating machinery. Classical approaches use supervised learning where a classifier is trained on labeled data to predict or classify different operational states of the machine. However, in most industrial applications, labeled data is limited in terms of its size and type. Hence, it cannot serve the training purpose. In this paper, this problem is tackled by addressing the classification task as a similarity measure to a reference sample rather than a supervised classification task. Similarity-based approaches require a limited amount of labeled data and hence, meet the requirements of real-world industrial applications. Accordingly, the paper introduces a similarity-based framework for predictive maintenance (PdM) of rotating machinery. For each operational state of the machine, a reference vibration signal is generated and labeled according to the machine's operational condition. Consequentially, statistical time analysis, fast Fourier transform (FFT), and short-time Fourier transform (STFT) are used to extract features from the captured vibration signals. For each feature type, three similarity metrics, namely structural similarity measure (SSM), cosine similarity, and Euclidean distance are used to measure the similarity between test signals and reference signals in the feature space. Hence, nine settings in terms of feature type-similarity measure combinations are evaluated. Experimental results confirm the effectiveness of similarity-based approaches in achieving very high accuracy with moderate computational requirements compared to machine learning (ML)-based methods. Further, the results indicate that using FFT features with cosine similarity would lead to better performance compared to the other settings.
Multi-Dimensional Self Attention based Approach for Remaining Useful Life Estimation
Dec 12, 2022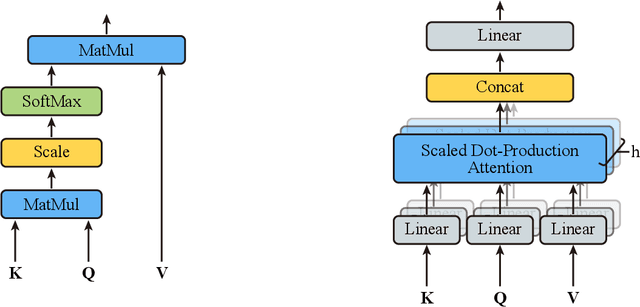
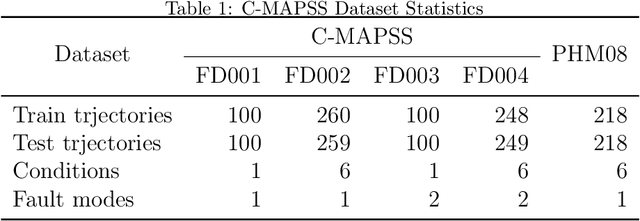
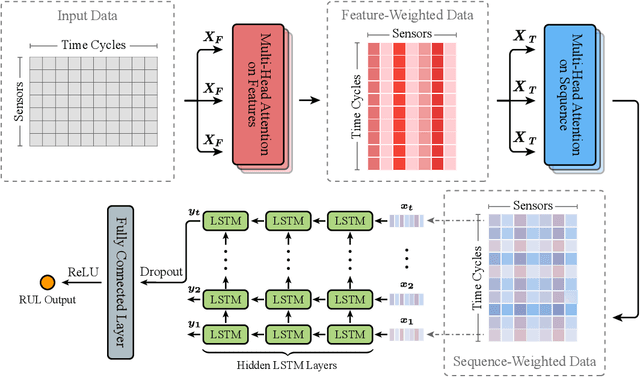
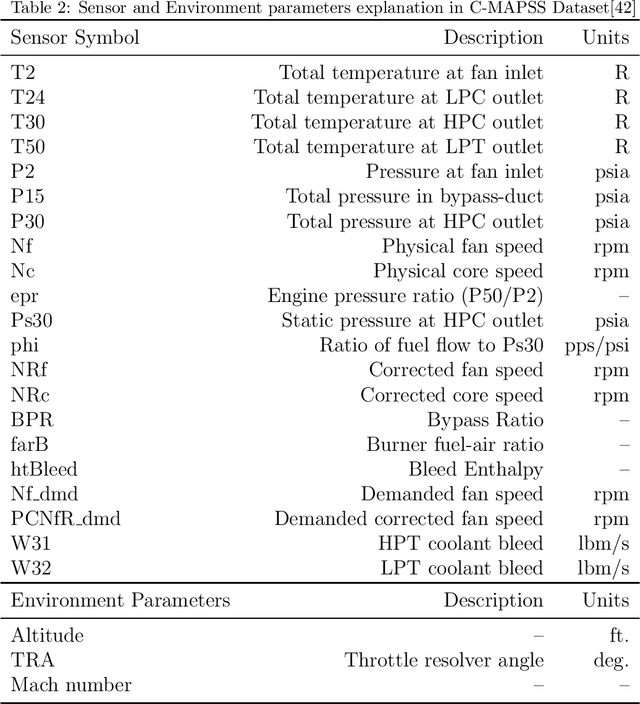
Remaining Useful Life (RUL) estimation plays a critical role in Prognostics and Health Management (PHM). Traditional machine health maintenance systems are often costly, requiring sufficient prior expertise, and are difficult to fit into highly complex and changing industrial scenarios. With the widespread deployment of sensors on industrial equipment, building the Industrial Internet of Things (IIoT) to interconnect these devices has become an inexorable trend in the development of the digital factory. Using the device's real-time operational data collected by IIoT to get the estimated RUL through the RUL prediction algorithm, the PHM system can develop proactive maintenance measures for the device, thus, reducing maintenance costs and decreasing failure times during operation. This paper carries out research into the remaining useful life prediction model for multi-sensor devices in the IIoT scenario. We investigated the mainstream RUL prediction models and summarized the basic steps of RUL prediction modeling in this scenario. On this basis, a data-driven approach for RUL estimation is proposed in this paper. It employs a Multi-Head Attention Mechanism to fuse the multi-dimensional time-series data output from multiple sensors, in which the attention on features is used to capture the interactions between features and attention on sequences is used to learn the weights of time steps. Then, the Long Short-Term Memory Network is applied to learn the features of time series. We evaluate the proposed model on two benchmark datasets (C-MAPSS and PHM08), and the results demonstrate that it outperforms the state-of-art models. Moreover, through the interpretability of the multi-head attention mechanism, the proposed model can provide a preliminary explanation of engine degradation. Therefore, this approach is promising for predictive maintenance in IIoT scenarios.
ACTIVE: A Deep Model for Sperm and Impurity Detection in Microscopic Videos
Jan 15, 2023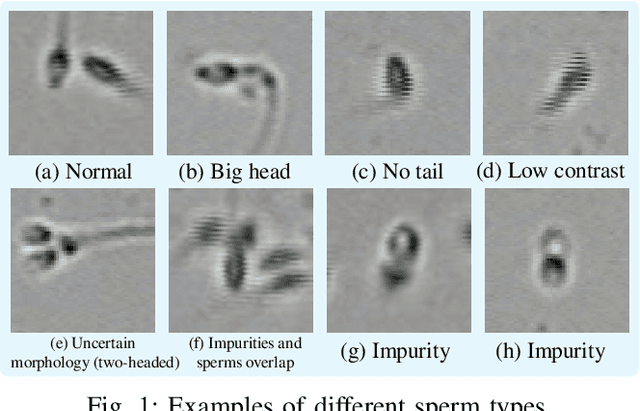
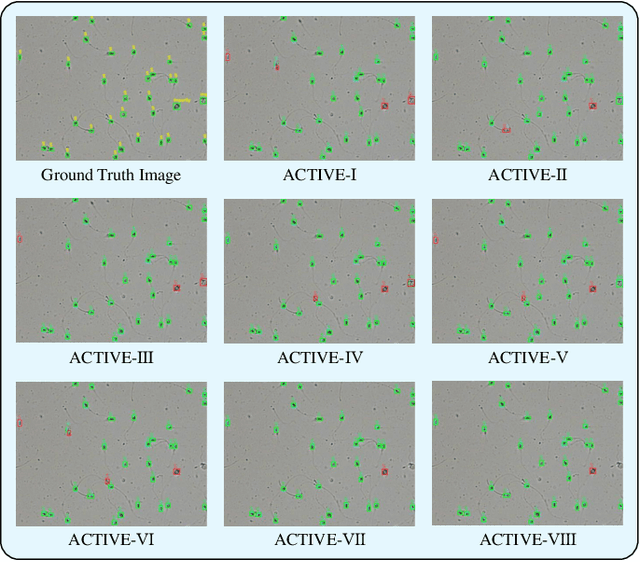
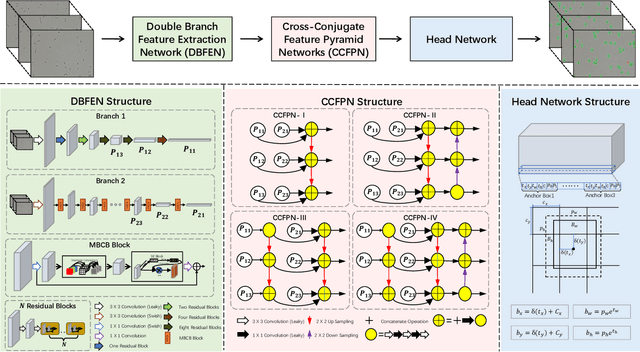

The accurate detection of sperms and impurities is a very challenging task, facing problems such as the small size of targets, indefinite target morphologies, low contrast and resolution of the video, and similarity of sperms and impurities. So far, the detection of sperms and impurities still largely relies on the traditional image processing and detection techniques which only yield limited performance and often require manual intervention in the detection process, therefore unfavorably escalating the time cost and injecting the subjective bias into the analysis. Encouraged by the successes of deep learning methods in numerous object detection tasks, here we report a deep learning model based on Double Branch Feature Extraction Network (DBFEN) and Cross-conjugate Feature Pyramid Networks (CCFPN).DBFEN is designed to extract visual features from tiny objects with a double branch structure, and CCFPN is further introduced to fuse the features extracted by DBFEN to enhance the description of position and high-level semantic information. Our work is the pioneer of introducing deep learning approaches to the detection of sperms and impurities. Experiments show that the highest AP50 of the sperm and impurity detection is 91.13% and 59.64%, which lead its competitors by a substantial margin and establish new state-of-the-art results in this problem.
An Efficient Approach to the Online Multi-Agent Path Finding Problem by Using Sustainable Information
Jan 11, 2023
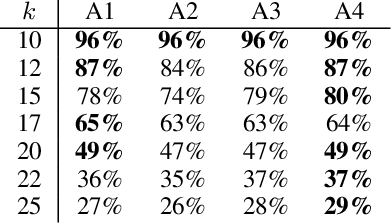
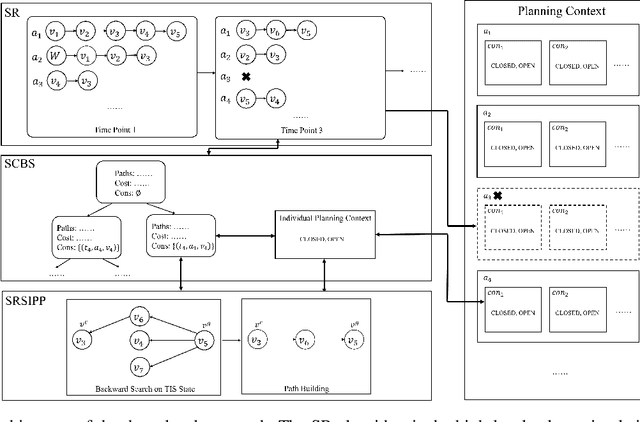
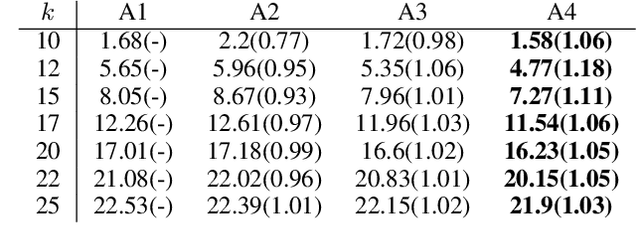
Multi-agent path finding (MAPF) is the problem of moving agents to the goal vertex without collision. In the online MAPF problem, new agents may be added to the environment at any time, and the current agents have no information about future agents. The inability of existing online methods to reuse previous planning contexts results in redundant computation and reduces algorithm efficiency. Hence, we propose a three-level approach to solve online MAPF utilizing sustainable information, which can decrease its redundant calculations. The high-level solver, the Sustainable Replan algorithm (SR), manages the planning context and simulates the environment. The middle-level solver, the Sustainable Conflict-Based Search algorithm (SCBS), builds a conflict tree and maintains the planning context. The low-level solver, the Sustainable Reverse Safe Interval Path Planning algorithm (SRSIPP), is an efficient single-agent solver that uses previous planning context to reduce duplicate calculations. Experiments show that our proposed method has significant improvement in terms of computational efficiency. In one of the test scenarios, our algorithm can be 1.48 times faster than SOTA on average under different agent number settings.
Thou Shalt not Pick all Items if Thou are First: of Strategyproof and Fair Picking Sequences
Jan 11, 2023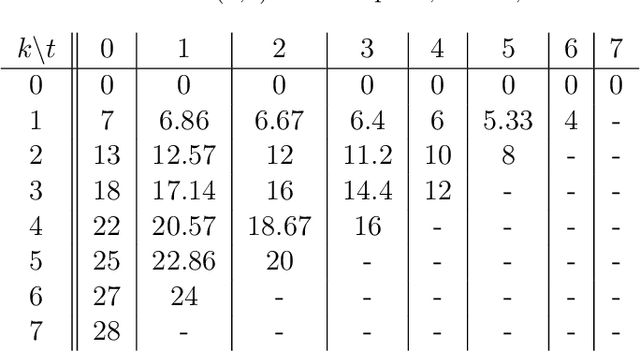
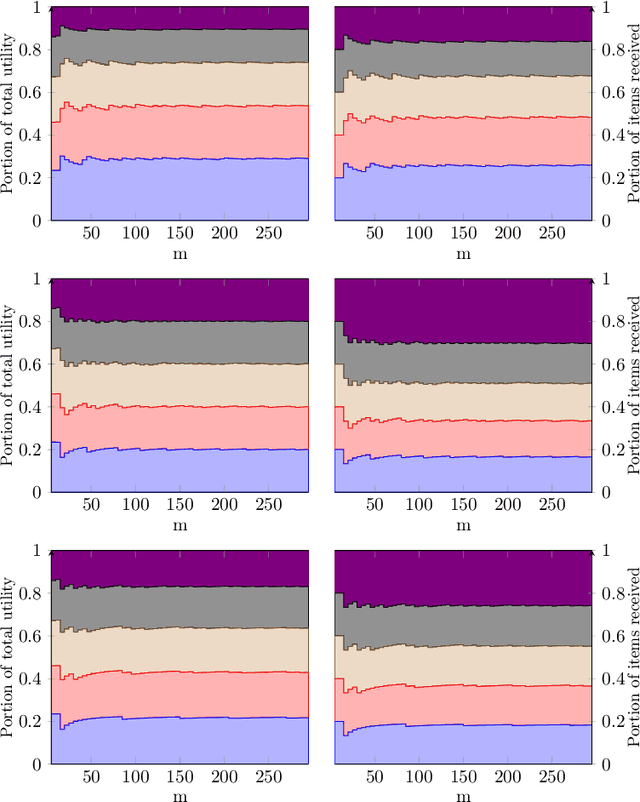
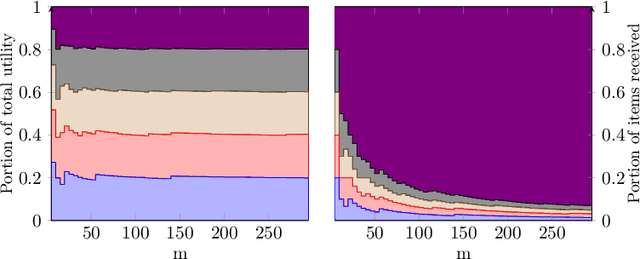
When allocating indivisible items to agents, it is known that the only strategyproof mechanisms that satisfy a set of rather mild conditions are constrained serial dictatorships: given a fixed order over agents, at each step the designated agent chooses a given number of items (depending on her position in the sequence). With these rules, also known as non-interleaving picking sequences, agents who come earlier in the sequence have a larger choice of items. However, this advantage can be compensated by a higher number of items received by those who come later. How to balance priority in the sequence and number of items received is a nontrivial question. We use a previous model, parameterized by a mapping from ranks to scores, a social welfare functional, and a distribution over preference profiles. For several meaningful choices of parameters, we show that the optimal sequence can be computed in polynomial time. Last, we give a simple procedure for eliciting scoring vectors and we study the impact of the assignment from agents to positions on the ex-post social welfare.