 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEnhancing Inverse Perspective Mapping for Automatic Vectorized Road Map Generation
Jan 27, 2026In this study, we present a low-cost and unified framework for vectorized road mapping leveraging enhanced inverse perspective mapping (IPM). In this framework, Catmull-Rom splines are utilized to characterize lane lines, and all the other ground markings are depicted using polygons uniformly. The results from instance segmentation serve as references to refine the three-dimensional position of spline control points and polygon corner points. In conjunction with this process, the homography matrix of IPM and vehicle poses are optimized simultaneously. Our proposed framework significantly reduces the mapping errors associated with IPM. It also improves the accuracy of the initial IPM homography matrix and the predicted vehicle poses. Furthermore, it addresses the limitations imposed by the coplanarity assumption in IPM. These enhancements enable IPM to be effectively applied to vectorized road mapping, which serves a cost-effective solution with enhanced accuracy. In addition, our framework generalizes road map elements to include all common ground markings and lane lines. The proposed framework is evaluated in two different practical scenarios, and the test results show that our method can automatically generate high-precision maps with near-centimeter-level accuracy. Importantly, the optimized IPM matrix achieves an accuracy comparable to that of manual calibration, while the accuracy of vehicle poses is also significantly improved.
Streaming Multi-agent Pathfinding
May 14, 2025The task of the multi-agent pathfinding (MAPF) problem is to navigate a team of agents from their start point to the goal points. However, this setup is unsuitable in the assembly line scenario, which is periodic with a long working hour. To address this issue, the study formalizes the streaming MAPF (S-MAPF) problem, which assumes that the agents in the same agent stream have a periodic start time and share the same action sequence. The proposed solution, Agent Stream Conflict-Based Search (ASCBS), is designed to tackle this problem by incorporating a cyclic vertex/edge constraint to handle conflicts. Additionally, this work explores the potential usage of the disjoint splitting strategy within ASCBS. Experimental results indicate that ASCBS surpasses traditional MAPF solvers in terms of runtime for scenarios with prolonged working hours.
MGCBS: An Optimal and Efficient Algorithm for Solving Multi-Goal Multi-Agent Path Finding Problem
Apr 30, 2024



With the expansion of the scale of robotics applications, the multi-goal multi-agent pathfinding (MG-MAPF) problem began to gain widespread attention. This problem requires each agent to visit pre-assigned multiple goal points at least once without conflict. Some previous methods have been proposed to solve the MG-MAPF problem based on Decoupling the goal Vertex visiting order search and the Single-agent pathfinding (DVS). However, this paper demonstrates that the methods based on DVS cannot always obtain the optimal solution. To obtain the optimal result, we propose the Multi-Goal Conflict-Based Search (MGCBS), which is based on Decoupling the goal Safe interval visiting order search and the Single-agent pathfinding (DSS). Additionally, we present the Time-Interval-Space Forest (TIS Forest) to enhance the efficiency of MGCBS by maintaining the shortest paths from any start point at any start time step to each safe interval at the goal points. The experiment demonstrates that our method can consistently obtain optimal results and execute up to 7 times faster than the state-of-the-art method in our evaluation.
Enhancing Campus Mobility: Achievements and Challenges of Autonomous Shuttle "Snow Lion''
Jan 17, 2024The rapid evolution of autonomous vehicles (AVs) has significantly influenced global transportation systems. In this context, we present ``Snow Lion'', an autonomous shuttle meticulously designed to revolutionize on-campus transportation, offering a safer and more efficient mobility solution for students, faculty, and visitors. The primary objective of this research is to enhance campus mobility by providing a reliable, efficient, and eco-friendly transportation solution that seamlessly integrates with existing infrastructure and meets the diverse needs of a university setting. To achieve this goal, we delve into the intricacies of the system design, encompassing sensing, perception, localization, planning, and control aspects. We evaluate the autonomous shuttle's performance in real-world scenarios, involving a 1146-kilometer road haul and the transportation of 442 passengers over a two-month period. These experiments demonstrate the effectiveness of our system and offer valuable insights into the intricate process of integrating an autonomous vehicle within campus shuttle operations. Furthermore, a thorough analysis of the lessons derived from this experience furnishes a valuable real-world case study, accompanied by recommendations for future research and development in the field of autonomous driving.
An Efficient Approach to the Online Multi-Agent Path Finding Problem by Using Sustainable Information
Jan 11, 2023Multi-agent path finding (MAPF) is the problem of moving agents to the goal vertex without collision. In the online MAPF problem, new agents may be added to the environment at any time, and the current agents have no information about future agents. The inability of existing online methods to reuse previous planning contexts results in redundant computation and reduces algorithm efficiency. Hence, we propose a three-level approach to solve online MAPF utilizing sustainable information, which can decrease its redundant calculations. The high-level solver, the Sustainable Replan algorithm (SR), manages the planning context and simulates the environment. The middle-level solver, the Sustainable Conflict-Based Search algorithm (SCBS), builds a conflict tree and maintains the planning context. The low-level solver, the Sustainable Reverse Safe Interval Path Planning algorithm (SRSIPP), is an efficient single-agent solver that uses previous planning context to reduce duplicate calculations. Experiments show that our proposed method has significant improvement in terms of computational efficiency. In one of the test scenarios, our algorithm can be 1.48 times faster than SOTA on average under different agent number settings.
MMFN: Multi-Modal-Fusion-Net for End-to-End Driving
Jul 01, 2022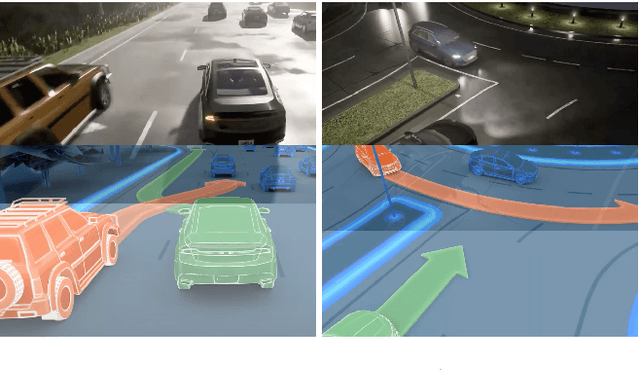
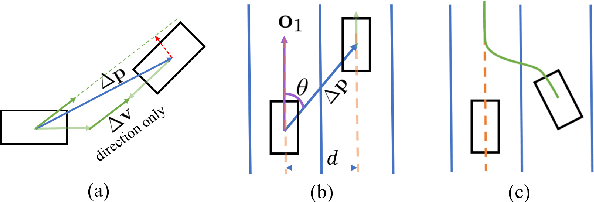
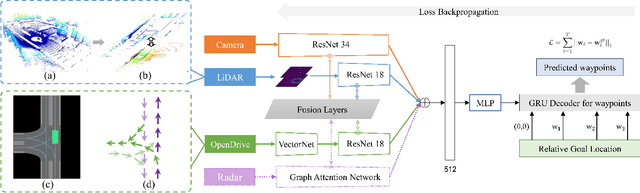
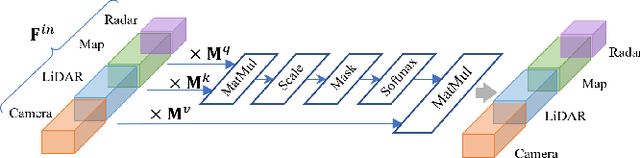
Inspired by the fact that humans use diverse sensory organs to perceive the world, sensors with different modalities are deployed in end-to-end driving to obtain the global context of the 3D scene. In previous works, camera and LiDAR inputs are fused through transformers for better driving performance. These inputs are normally further interpreted as high-level map information to assist navigation tasks. Nevertheless, extracting useful information from the complex map input is challenging, for redundant information may mislead the agent and negatively affect driving performance. We propose a novel approach to efficiently extract features from vectorized High-Definition (HD) maps and utilize them in the end-to-end driving tasks. In addition, we design a new expert to further enhance the model performance by considering multi-road rules. Experimental results prove that both of the proposed improvements enable our agent to achieve superior performance compared with other methods.