 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDroneulator: A Portable UAV Simulator for Agricultural Workflows with RotorPy and Godot 4
May 22, 2026Agricultural UAV research requires simulators that integrate realistic 3D scenes, high-fidelity vehicle dynamics, and robotics middleware, while remaining practical to deploy across heterogeneous development machines. We present Droneulator, a portable UAV simulator architecture that combines RotorPy for multirotor dynamics with Godot 4 for rendering and sensor generation. Droneulator exposes both PX4-based control and a lightweight WebSocket command path, and publishes synchronised visual and state streams through a Zenoh-based ROS~2-compatible pipeline. This integration enables a single stack to support inspection-oriented data capture, ROS~2/PX4 local planning, and reinforcement learning experiments without modifying the simulator infrastructure. We present quantified validation of the current system across three agricultural UAV workflows: tree-scale image collection for 3D reconstruction with COLMAP, local planning around canopy obstacles using EGO-Planner, and closed-loop reinforcement learning through a custom Gymnasium environment. In the reported setup, the results show that the simulator can sustain low-latency sensing, support reconstruction-oriented data collection under varying capture density, execute collision-free local planning around canopy obstacles, and support stable depth-sensing-based policy training for obstacle-aware navigation. Together, these results show the potential of Droneulator for agricultural UAV inspection, planning, and learning within one deployable stack.
Perception-Aware Autonomous Exploration in Feature-Limited Environments
Mar 16, 2026Autonomous exploration in unknown environments typically relies on onboard state estimation for localisation and mapping. Existing exploration methods primarily maximise coverage efficiency, but often overlook that visual-inertial odometry (VIO) performance strongly depends on the availability of robust visual features. As a result, exploration policies can drive a robot into feature-sparse regions where tracking degrades, leading to odometry drift, corrupted maps, and mission failure. We propose a hierarchical perception-aware exploration framework for a stereo-equipped unmanned aerial vehicle (UAV) that explicitly couples exploration progress with feature observability. Our approach (i) associates each candidate frontier with an expected feature quality using a global feature map, and prioritises visually informative subgoals, and (ii) optimises a continuous yaw trajectory along the planned motion to maintain stable feature tracks. We evaluate our method in simulation across environments with varying texture levels and in real-world indoor experiments with largely textureless walls. Compared to baselines that ignore feature quality and/or do not optimise continuous yaw, our method maintains more reliable feature tracking, reduces odometry drift, and achieves on average 30\% higher coverage before the odometry error exceeds specified thresholds.
Semantic Landmark Particle Filter for Robot Localisation in Vineyards
Mar 11, 2026Reliable localisation in vineyards is hindered by row-level perceptual aliasing: parallel crop rows produce nearly identical LiDAR observations, causing geometry-only and vision-based SLAM systems to converge towards incorrect corridors, particularly during headland transitions. We present a Semantic Landmark Particle Filter (SLPF) that integrates trunk and pole landmark detections with 2D LiDAR within a probabilistic localisation framework. Detected trunks are converted into semantic walls, forming structural row boundaries embedded in the measurement model to improve discrimination between adjacent rows. GNSS is incorporated as a lightweight prior that stabilises localisation when semantic observations are sparse. Field experiments in a 10-row vineyard demonstrate consistent improvements over geometry-only (AMCL), vision-based (RTAB-Map), and GNSS baselines. Compared to AMCL, SLPF reduces Absolute Pose Error by 22% and 65% across two traversal directions; relative to a NoisyGNSS baseline, APE decreases by 65% and 61%. Row correctness improves from 0.67 to 0.73, while mean cross-track error decreases from 1.40 m to 1.26 m. These results show that embedding row-level structural semantics within the measurement model enables robust localisation in highly repetitive outdoor agricultural environments.
Active Informative Planning for UAV-based Weed Mapping using Discrete Gaussian Process Representations
Jan 19, 2026Accurate agricultural weed mapping using unmanned aerial vehicles (UAVs) is crucial for precision farming. While traditional methods rely on rigid, pre-defined flight paths and intensive offline processing, informative path planning (IPP) offers a way to collect data adaptively where it is most needed. Gaussian process (GP) mapping provides a continuous model of weed distribution with built-in uncertainty. However, GPs must be discretised for practical use in autonomous planning. Many discretisation techniques exist, but the impact of discrete representation choice remains poorly understood. This paper investigates how different discrete GP representations influence both mapping quality and mission-level performance in UAV-based weed mapping. Considering a UAV equipped with a downward-facing camera, we implement a receding-horizon IPP strategy that selects sampling locations based on the map uncertainty, travel cost, and coverage penalties. We investigate multiple discretisation strategies for representing the GP posterior and use their induced map partitions to generate candidate viewpoints for planning. Experiments on real-world weed distributions show that representation choice significantly affects exploration behaviour and efficiency. Overall, our results demonstrate that discretisation is not only a representational detail but a key design choice that shapes planning dynamics, coverage efficiency, and computational load in online UAV weed mapping.
Keypoint Semantic Integration for Improved Feature Matching in Outdoor Agricultural Environments
Mar 11, 2025Robust robot navigation in outdoor environments requires accurate perception systems capable of handling visual challenges such as repetitive structures and changing appearances. Visual feature matching is crucial to vision-based pipelines but remains particularly challenging in natural outdoor settings due to perceptual aliasing. We address this issue in vineyards, where repetitive vine trunks and other natural elements generate ambiguous descriptors that hinder reliable feature matching. We hypothesise that semantic information tied to keypoint positions can alleviate perceptual aliasing by enhancing keypoint descriptor distinctiveness. To this end, we introduce a keypoint semantic integration technique that improves the descriptors in semantically meaningful regions within the image, enabling more accurate differentiation even among visually similar local features. We validate this approach in two vineyard perception tasks: (i) relative pose estimation and (ii) visual localisation. Across all tested keypoint types and descriptors, our method improves matching accuracy by 12.6%, demonstrating its effectiveness over multiple months in challenging vineyard conditions.
Discrete Gaussian Process Representations for Optimising UAV-based Precision Weed Mapping
Mar 10, 2025Accurate agricultural weed mapping using UAVs is crucial for precision farming applications. Traditional methods rely on orthomosaic stitching from rigid flight paths, which is computationally intensive and time-consuming. Gaussian Process (GP)-based mapping offers continuous modelling of the underlying variable (i.e. weed distribution) but requires discretisation for practical tasks like path planning or visualisation. Current implementations often default to quadtrees or gridmaps without systematically evaluating alternatives. This study compares five discretisation methods: quadtrees, wedgelets, top-down binary space partition (BSP) trees using least square error (LSE), bottom-up BSP trees using graph merging, and variable-resolution hexagonal grids. Evaluations on real-world weed distributions measure visual similarity, mean squared error (MSE), and computational efficiency. Results show quadtrees perform best overall, but alternatives excel in specific scenarios: hexagons or BSP LSE suit fields with large, dominant weed patches, while quadtrees are optimal for dispersed small-scale distributions. These findings highlight the need to tailor discretisation approaches to weed distribution patterns (patch size, density, coverage) rather than relying on default methods. By choosing representations based on the underlying distribution, we can improve mapping accuracy and efficiency for precision agriculture applications.
End-to-end Unsupervised Learning of Long-Term 3D Stable objects
Jan 26, 2023



3D point cloud semantic classification is an important task in robotics as it enables a better understanding of the mapped environment. This work proposes to learn the long-term stability of the 3D objects using a neural network based on PointNet++, where the long-term stable object refers to a static object that cannot move on its own (e.g. tree, pole, building). The training data is generated in an unsupervised manner by assigning a continuous label to individual points by exploiting multiple time slices of the same environment. Instead of using discrete labels, i.e. static/dynamic, we propose to use a continuous label value indicating point temporal stability to train a regression PointNet++ network. We evaluated our approach on point cloud data of two parking lots from the NCLT dataset. The experiments' performance reveals that static vs dynamic object classification is best performed by training a regression model, followed by thresholding, compared to directly training a classification model.
Collection and Evaluation of a Long-Term 4D Agri-Robotic Dataset
Nov 25, 2022



Long-term autonomy is one of the most demanded capabilities looked into a robot. The possibility to perform the same task over and over on a long temporal horizon, offering a high standard of reproducibility and robustness, is appealing. Long-term autonomy can play a crucial role in the adoption of robotics systems for precision agriculture, for example in assisting humans in monitoring and harvesting crops in a large orchard. With this scope in mind, we report an ongoing effort in the long-term deployment of an autonomous mobile robot in a vineyard for data collection across multiple months. The main aim is to collect data from the same area at different points in time so to be able to analyse the impact of the environmental changes in the mapping and localisation tasks. In this work, we present a map-based localisation study taking 4 data sessions. We identify expected failures when the pre-built map visually differs from the environment's current appearance and we anticipate LTS-Net, a solution pointed at extracting stable temporal features for improving long-term 4D localisation results.
Benchmark of visual and 3D lidar SLAM systems in simulation environment for vineyards
Jul 12, 2021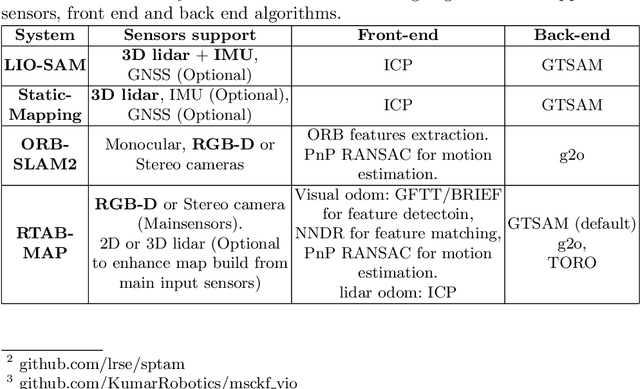
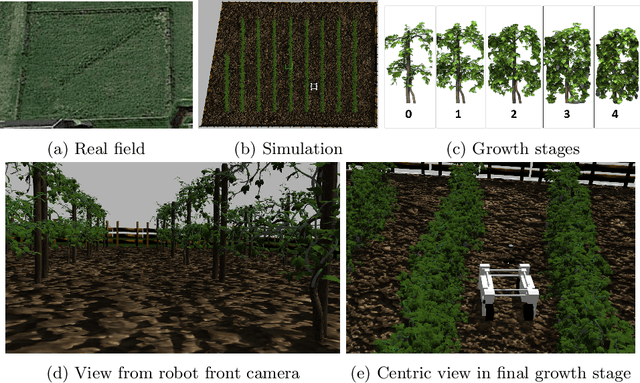
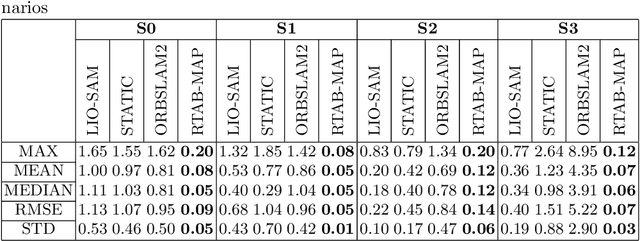
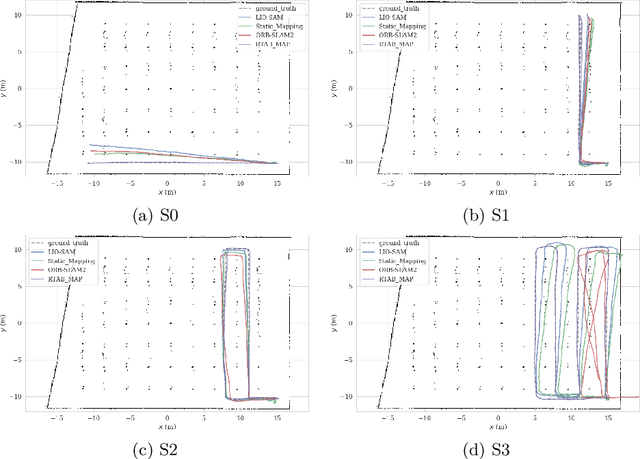
In this work, we present a comparative analysis of the trajectories estimated from various Simultaneous Localization and Mapping (SLAM) systems in a simulation environment for vineyards. Vineyard environment is challenging for SLAM methods, due to visual appearance changes over time, uneven terrain, and repeated visual patterns. For this reason, we created a simulation environment specifically for vineyards to help studying SLAM systems in such a challenging environment. We evaluated the following SLAM systems: LIO-SAM, StaticMapping, ORB-SLAM2, and RTAB-MAP in four different scenarios. The mobile robot used in this study equipped with 2D and 3D lidars, IMU, and RGB-D camera (Kinect v2). The results show good and encouraging performance of RTAB-MAP in such an environment.
Navigate-and-Seek: a Robotics Framework for People Localization in Agricultural Environments
Jul 08, 2021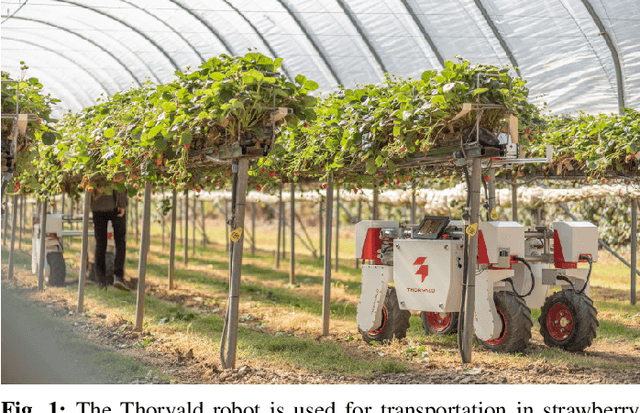
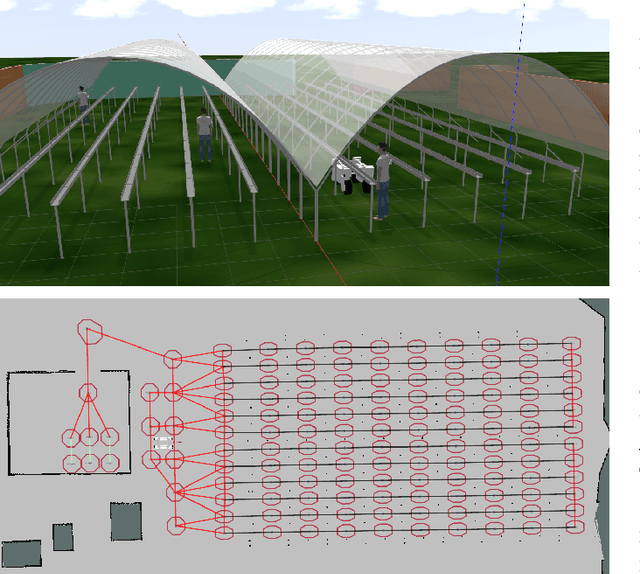
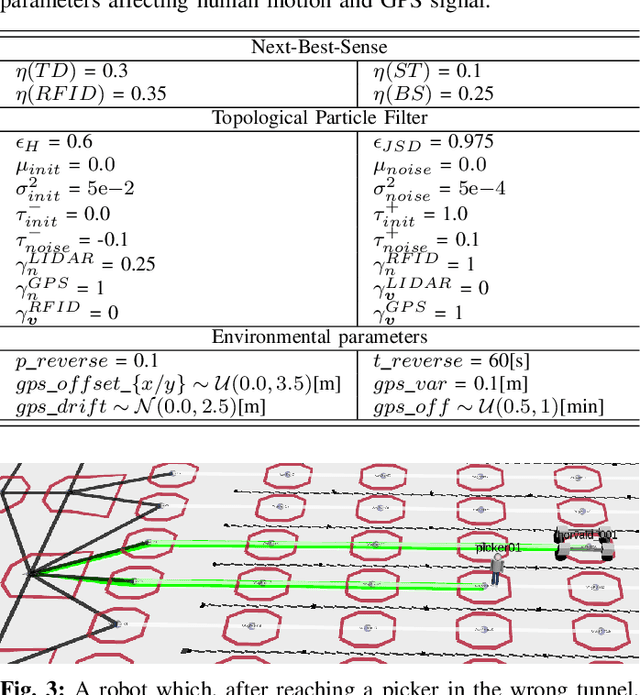
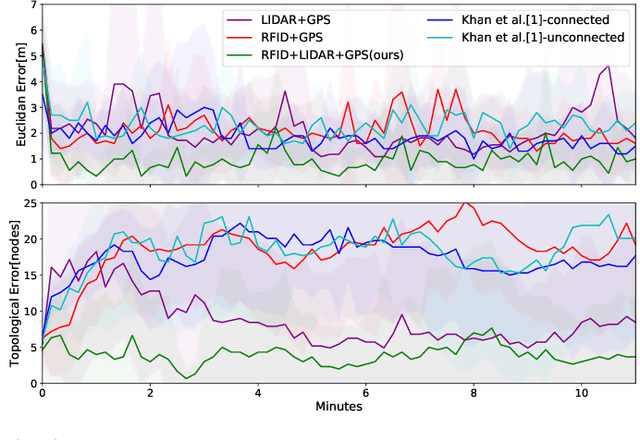
The agricultural domain offers a working environment where many human laborers are nowadays employed to maintain or harvest crops, with huge potential for productivity gains through the introduction of robotic automation. Detecting and localizing humans reliably and accurately in such an environment, however, is a prerequisite to many services offered by fleets of mobile robots collaborating with human workers. Consequently, in this paper, we expand on the concept of a topological particle filter (TPF) to accurately and individually localize and track workers in a farm environment, integrating information from heterogeneous sensors and combining local active sensing (exploiting a robot's onboard sensing employing a Next-Best-Sense planning approach) and global localization (using affordable IoT GNSS devices). We validate the proposed approach in topologies created for the deployment of robotics fleets to support fruit pickers in a real farm environment. By combining multi-sensor observations on the topological level complemented by active perception through the NBS approach, we show that we can improve the accuracy of picker localization in comparison to prior work.