 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Entropy: Learning from Token-Level Distributional Deviations for LLM Reasoning
Jun 18, 2026Reinforcement Learning with Verifiable Rewards (RLVR) has significantly advanced Large Language Model (LLM) reasoning; however, it faces a fundamental optimization instability: uniform token updates precipitate entropy collapse, leading to premature convergence to suboptimal strategies, whereas excessive Shannon Entropy maximization can cause entropy explosion, driving blind exploration toward incoherent reasoning chains. To resolve this dichotomy, we introduce the Independent Combinatorial Tokens (ICT) framework, which shifts the optimization focus from scalar uncertainty to the distributional properties of token logits. By leveraging the Jensen-Shannon (JS) divergence between token logits distributions, ICT identifies tokens with distinctive distributional patterns as critical branching points for guiding effective exploration in LLM reasoning. Our theoretical analysis, grounded in both Shannon and second-order Rényi entropy, proves that selectively updating on these tokens regulates policy concentration: it reduces the overall distribution uncertainty measured by Shannon entropy, while controlling probability concentration captured by second-order Rényi entropy. This dual effect prevents over-concentrated token generation from weakening exploration and effectively stabilizes the training landscape. Empirical results demonstrate that updating only the top 10% of unique tokens on Qwen2.5 (0.5B/1.5B/7B) models yields an average pass@4 improvement of 4.58%, with a maximum gain of 14.9%, over GRPO, 20-Entropy, and STAPO baselines across seven benchmarks spanning math, commonsense, and Olympiad-level problems.
CASTLE2026 Team WDL Technical Report
May 30, 2026The CASTLE Challenge @ EgoVis 2026 evaluates long-form egocentric video question answering over 600+ hours of multi-perspective recordings. Each four-choice question requires evidence from videos, transcripts, auxiliary photos, people, days, rooms, and temporal context. We propose an evidence-aware multimodal reasoning pipeline based on Qwen. Our system parses question hints, retrieves ASR chunks, attaches auxiliary images, samples candidate video frames, and routes questions into static visual, speech/text, temporal, and mixed types with specialized prompts. Multiple inference passes are aggregated by confidence-weighted voting and converted into the official Codabench format. In ablation, LoRA improves the score from 0.21 to 0.50, and more sampled frames further raise it to 0.58. Our final system ranks first in the CASTLE Challenge @ EgoVis 2026.
LoViF 2026 The First Challenge on Holistic Quality Assessment for 4D World Model (PhyScore)
May 06, 2026This paper reports on the LoViF 2026 PhyScore challenge, a competition on holistic quality assessment of world-model-generated videos across both 2D and 4D generation settings. The challenge is motivated by a central gap in current evaluation practice: perceptual quality alone is insufficient to judge whether generated dynamics are physically plausible, temporally coherent, and consistent with input conditions. Participants are required to build a metric that jointly predicts four dimensions, i.e., Video Quality, Physical Realism, Condition-Video Alignment, and Temporal Consistency. Depart from that, participants also need to localize physical anomaly timestamps for fine-grained diagnosis. The benchmark dataset contains 1,554 videos generated by seven representative world generative models, organized into three tracks (text-2D, image-to-4D, and video-to-4D) and spanning 26 categories. These categories explicitly cover physics-relevant scenarios, including dynamics, optics, and thermodynamics, together with diverse real-world and creative content. To ensure label reliability, scores and anomaly timestamps are produced through trained human annotation with an additional automated quality-control pass. Evaluation is based on both score prediction and anomaly localization, with a composite protocol that combines TimeStamp_IOU and SRCC/PLCC. This report summarizes the challenge design and provides method-level insights from submitted solutions.
Noise-Robust AV-ASR Using Visual Features Both in the Whisper Encoder and Decoder
Jan 26, 2026In audiovisual automatic speech recognition (AV-ASR) systems, information fusion of visual features in a pre-trained ASR has been proven as a promising method to improve noise robustness. In this work, based on the prominent Whisper ASR, first, we propose a simple and effective visual fusion method -- use of visual features both in encoder and decoder (dual-use) -- to learn the audiovisual interactions in the encoder and to weigh modalities in the decoder. Second, we compare visual fusion methods in Whisper models of various sizes. Our proposed dual-use method shows consistent noise robustness improvement, e.g., a 35% relative improvement (WER: 4.41% vs. 6.83%) based on Whisper small, and a 57% relative improvement (WER: 4.07% vs. 9.53%) based on Whisper medium, compared to typical reference middle fusion in babble noise with a signal-to-noise ratio (SNR) of 0dB. Third, we conduct ablation studies examining the impact of various module designs and fusion options. Fine-tuned on 1929 hours of audiovisual data, our dual-use method using Whisper medium achieves 4.08% (MUSAN babble noise) and 4.43% (NoiseX babble noise) average WER across various SNRs, thereby establishing a new state-of-the-art in noisy conditions on the LRS3 AV-ASR benchmark. Our code is at https://github.com/ifnspaml/Dual-Use-AVASR
OpenViGA: Video Generation for Automotive Driving Scenes by Streamlining and Fine-Tuning Open Source Models with Public Data
Sep 18, 2025



Recent successful video generation systems that predict and create realistic automotive driving scenes from short video inputs assign tokenization, future state prediction (world model), and video decoding to dedicated models. These approaches often utilize large models that require significant training resources, offer limited insight into design choices, and lack publicly available code and datasets. In this work, we address these deficiencies and present OpenViGA, an open video generation system for automotive driving scenes. Our contributions are: Unlike several earlier works for video generation, such as GAIA-1, we provide a deep analysis of the three components of our system by separate quantitative and qualitative evaluation: Image tokenizer, world model, video decoder. Second, we purely build upon powerful pre-trained open source models from various domains, which we fine-tune by publicly available automotive data (BDD100K) on GPU hardware at academic scale. Third, we build a coherent video generation system by streamlining interfaces of our components. Fourth, due to public availability of the underlying models and data, we allow full reproducibility. Finally, we also publish our code and models on Github. For an image size of 256x256 at 4 fps we are able to predict realistic driving scene videos frame-by-frame with only one frame of algorithmic latency.
MARS2 2025 Challenge on Multimodal Reasoning: Datasets, Methods, Results, Discussion, and Outlook
Sep 17, 2025
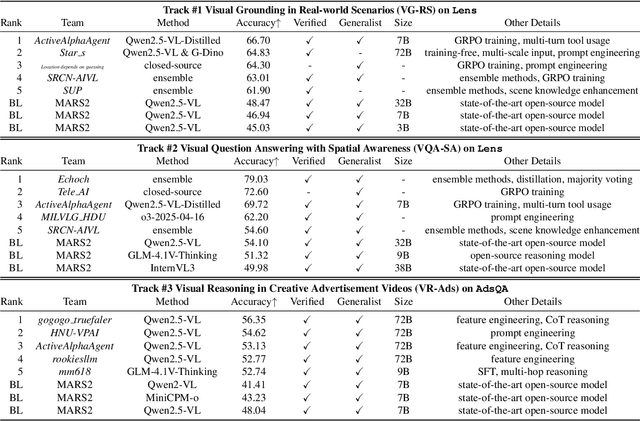

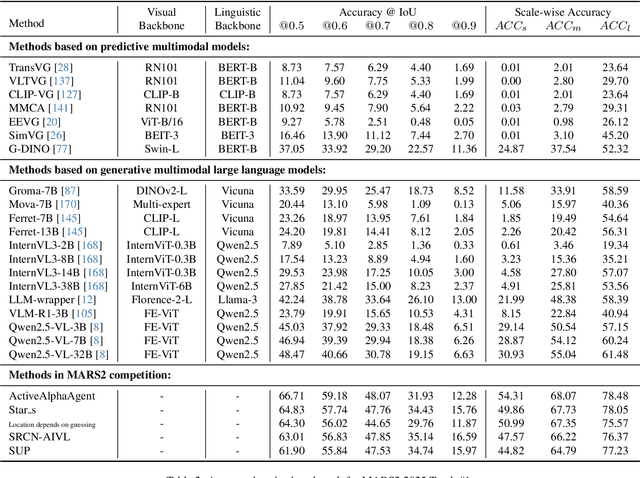
This paper reviews the MARS2 2025 Challenge on Multimodal Reasoning. We aim to bring together different approaches in multimodal machine learning and LLMs via a large benchmark. We hope it better allows researchers to follow the state-of-the-art in this very dynamic area. Meanwhile, a growing number of testbeds have boosted the evolution of general-purpose large language models. Thus, this year's MARS2 focuses on real-world and specialized scenarios to broaden the multimodal reasoning applications of MLLMs. Our organizing team released two tailored datasets Lens and AdsQA as test sets, which support general reasoning in 12 daily scenarios and domain-specific reasoning in advertisement videos, respectively. We evaluated 40+ baselines that include both generalist MLLMs and task-specific models, and opened up three competition tracks, i.e., Visual Grounding in Real-world Scenarios (VG-RS), Visual Question Answering with Spatial Awareness (VQA-SA), and Visual Reasoning in Creative Advertisement Videos (VR-Ads). Finally, 76 teams from the renowned academic and industrial institutions have registered and 40+ valid submissions (out of 1200+) have been included in our ranking lists. Our datasets, code sets (40+ baselines and 15+ participants' methods), and rankings are publicly available on the MARS2 workshop website and our GitHub organization page https://github.com/mars2workshop/, where our updates and announcements of upcoming events will be continuously provided.
A Comprehensive Review of Multi-Agent Reinforcement Learning in Video Games
Sep 03, 2025Recent advancements in multi-agent reinforcement learning (MARL) have demonstrated its application potential in modern games. Beginning with foundational work and progressing to landmark achievements such as AlphaStar in StarCraft II and OpenAI Five in Dota 2, MARL has proven capable of achieving superhuman performance across diverse game environments through techniques like self-play, supervised learning, and deep reinforcement learning. With its growing impact, a comprehensive review has become increasingly important in this field. This paper aims to provide a thorough examination of MARL's application from turn-based two-agent games to real-time multi-agent video games including popular genres such as Sports games, First-Person Shooter (FPS) games, Real-Time Strategy (RTS) games and Multiplayer Online Battle Arena (MOBA) games. We further analyze critical challenges posed by MARL in video games, including nonstationary, partial observability, sparse rewards, team coordination, and scalability, and highlight successful implementations in games like Rocket League, Minecraft, Quake III Arena, StarCraft II, Dota 2, Honor of Kings, etc. This paper offers insights into MARL in video game AI systems, proposes a novel method to estimate game complexity, and suggests future research directions to advance MARL and its applications in game development, inspiring further innovation in this rapidly evolving field.
Integrated Snapshot Near-infrared Hypersepctral Imaging Framework with Diffractive Optics
Aug 20, 2025



We propose an integrated snapshot near-infrared hyperspectral imaging framework that combines designed DOE with NIRSA-Net. The results demonstrate near-infrared spectral imaging at 700-1000nm with 10nm resolution while achieving improvement of PSNR 1.47dB and SSIM 0.006.
Intelligent road crack detection and analysis based on improved YOLOv8
Apr 16, 2025As urbanization speeds up and traffic flow increases, the issue of pavement distress is becoming increasingly pronounced, posing a severe threat to road safety and service life. Traditional methods of pothole detection rely on manual inspection, which is not only inefficient but also costly. This paper proposes an intelligent road crack detection and analysis system, based on the enhanced YOLOv8 deep learning framework. A target segmentation model has been developed through the training of 4029 images, capable of efficiently and accurately recognizing and segmenting crack regions in roads. The model also analyzes the segmented regions to precisely calculate the maximum and minimum widths of cracks and their exact locations. Experimental results indicate that the incorporation of ECA and CBAM attention mechanisms substantially enhances the model's detection accuracy and efficiency, offering a novel solution for road maintenance and safety monitoring.
Calibrating Deep Neural Network using Euclidean Distance
Oct 23, 2024



Uncertainty is a fundamental aspect of real-world scenarios, where perfect information is rarely available. Humans naturally develop complex internal models to navigate incomplete data and effectively respond to unforeseen or partially observed events. In machine learning, Focal Loss is commonly used to reduce misclassification rates by emphasizing hard-to-classify samples. However, it does not guarantee well-calibrated predicted probabilities and may result in models that are overconfident or underconfident. High calibration error indicates a misalignment between predicted probabilities and actual outcomes, affecting model reliability. This research introduces a novel loss function called Focal Calibration Loss (FCL), designed to improve probability calibration while retaining the advantages of Focal Loss in handling difficult samples. By minimizing the Euclidean norm through a strictly proper loss, FCL penalizes the instance-wise calibration error and constrains bounds. We provide theoretical validation for proposed method and apply it to calibrate CheXNet for potential deployment in web-based health-care systems. Extensive evaluations on various models and datasets demonstrate that our method achieves SOTA performance in both calibration and accuracy metrics.