 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDexFuture: Hierarchical Future-State Visuomotor Targeting for Bimanual Dexterous Tool Use
Jun 04, 2026Bimanual dexterous tool use remains challenging for robots due to high-dimensional hand configurations and complex hand-tool-object dynamics and contact. Most existing control policies depend on future configuration references provided from demonstrations, while future action-conditioned world models require slow online planning over high-dimensional action sequences. A significant challenge is generating a dynamically consistent future reference trajectory without relying on privileged states from demonstrations or slow counterfactual planning. We propose DexFuture, a hierarchical system that couples a high-level Future-State Visuomotor Target Predictor with a low-level Target-Conditioned Structured Dexterous Policy. Conditioned on egocentric RGB, proprioceptive and geometric history, the high-level predictor constructs structured hand-tool-object visuomotor embeddings and uses a horizon-conditioned transformer to generate a multi-step future target trajectory. Then, the low-level policy tracks them with a target-conditioned per-link transformer. This hierarchy decouples coarse future reference generation from fine-grained action control, and slow long-horizon semantic prediction from high-frequency execution. On OakInk2 bimanual tool-use tasks, DexFuture achieves 90% of the privileged-oracle performance, compared to 7% for a no-reference policy. DexFuture operates at 60 Hz, approximately 250 times faster than DexWM-style Cross-Entropy Method (CEM) planning with a future action-conditioned world model.
Object-Informed Model Predictive Path Integral Control for Non-Prehensile Robot Manipulation
May 29, 2026Long-horizon planning for non-prehensile robot manipulation is challenging due to underactuated and discontinuous interactions. We propose a hierarchical formulation of model predictive path integral (MPPI) control that guides robot-level planning with a separately computed object-level plan to achieve efficient long-horizon prediction. We first solve a simplified object-only problem, assuming the object can be actuated directly, and use the planned object trajectory as a reference in solving the joint robot-object planning problem. We evaluate our method in both simulation and hardware using a 6-DoF xArm6 manipulator to perform object pushing tasks in which the target object must reach a goal while avoiding static obstacles, necessitating non-myopic reasoning. Our object-informed MPPI increases task success by 40\% with a 26\% faster control frequency in simulation, and by 20\% in real experiments with similar computation as regular MPPI.
Kernel-SDF: An Open-Source Library for Real-Time Signed Distance Function Estimation using Kernel Regression
Mar 31, 2026Accurate and efficient environment representation is crucial for robotic applications such as motion planning, manipulation, and navigation. Signed distance functions (SDFs) have emerged as a powerful representation for encoding distance to obstacle boundaries, enabling efficient collision-checking and trajectory optimization techniques. However, existing SDF reconstruction methods have limitations when it comes to large-scale uncertainty-aware SDF estimation from streaming sensor data. Voxel-based approaches are limited by fixed resolution and lack uncertainty quantification, neural network methods require significant training time, while Gaussian process (GP) methods struggle with scalability, sign estimation, and uncertainty calibration. In this letter, we develop an open-source library, Kernel-SDF, which uses kernel regression to learn SDF with calibrated uncertainty quantification in real-time. Our approach consists of a front-end that learns a continuous occupancy field via kernel regression, and a back-end that estimates accurate SDF via GP regression using samples from the front-end surface boundaries. Kernel-SDF provides accurate SDF, SDF gradient, SDF uncertainty, and mesh construction in real-time. Evaluation results show that Kernel-SDF achieves superior accuracy compared to existing methods, while maintaining real-time performance, making it suitable for various robotics applications requiring reliable uncertainty-aware geometric information.
PhysGraph: Physically-Grounded Graph-Transformer Policies for Bimanual Dexterous Hand-Tool-Object Manipulation
Mar 02, 2026Bimanual dexterous manipulation for tool use remains a formidable challenge in robotics due to the high-dimensional state space and complicated contact dynamics. Existing methods naively represent the entire system state as a single configuration vector, disregarding the rich structural and topological information inherent to articulated hands. We present PhysGraph, a physically-grounded graph transformer policy designed explicitly for challenging bimanual hand-tool-object manipulation. Unlike prior works, we represent the bimanual system as a kinematic graph and introduce per-link tokenization to preserve fine-grained local state information. We propose a physically-grounded bias generator that injects structural priors directly into the attention mechanism, including kinematic spatial distance, dynamic contact states, geometric proximity, and anatomical properties. This allows the policy to explicitly reason about physical interactions rather than learning them implicitly from sparse rewards. Extensive experiments show that PhysGraph significantly outperforms baseline - ManipTrans in manipulation precision and task success rates while using only 51% of the parameters of ManipTrans. Furthermore, the inherent topological flexibility of our architecture shows qualitative zero-shot transfer to unseen tool/object geometries, and is sufficiently general to be trained on three robotic hands (Shadow, Allegro, Inspire).
Learning Scene-Level Signed Directional Distance Function with Ellipsoidal Priors and Neural Residuals
Mar 25, 2025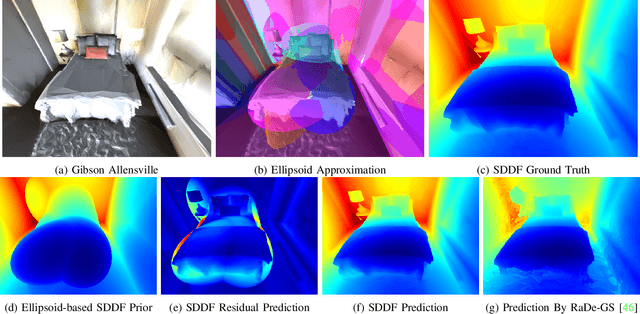
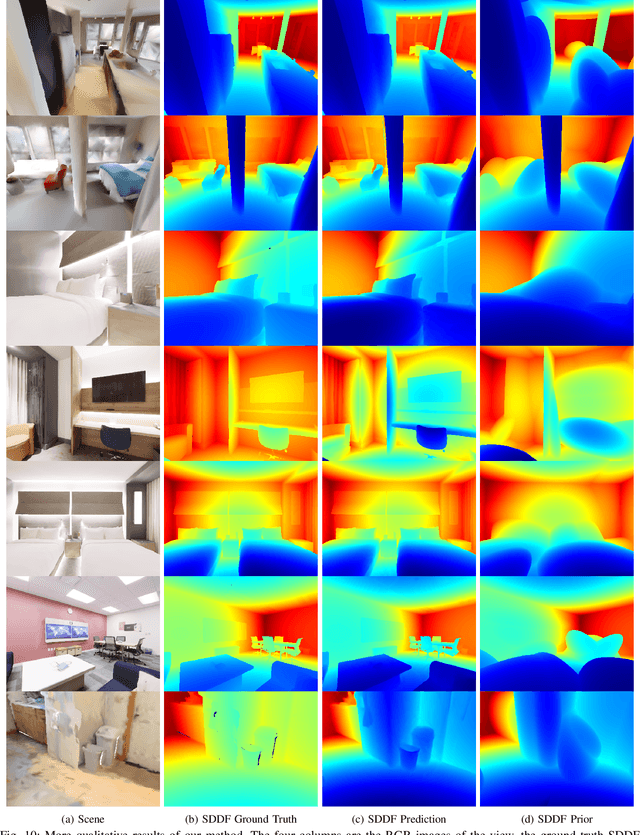

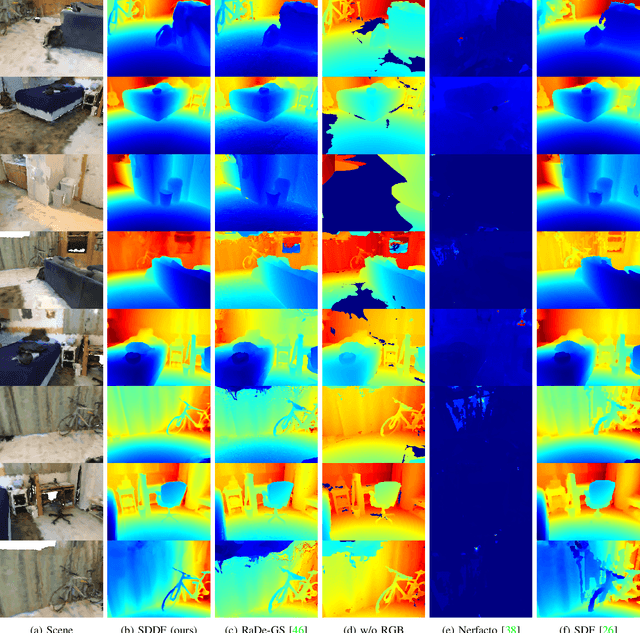
Dense geometric environment representations are critical for autonomous mobile robot navigation and exploration. Recent work shows that implicit continuous representations of occupancy, signed distance, or radiance learned using neural networks offer advantages in reconstruction fidelity, efficiency, and differentiability over explicit discrete representations based on meshes, point clouds, and voxels. In this work, we explore a directional formulation of signed distance, called signed directional distance function (SDDF). Unlike signed distance function (SDF) and similar to neural radiance fields (NeRF), SDDF has a position and viewing direction as input. Like SDF and unlike NeRF, SDDF directly provides distance to the observed surface along the direction, rather than integrating along the view ray, allowing efficient view synthesis. To learn and predict scene-level SDDF efficiently, we develop a differentiable hybrid representation that combines explicit ellipsoid priors and implicit neural residuals. This approach allows the model to effectively handle large distance discontinuities around obstacle boundaries while preserving the ability for dense high-fidelity prediction. We show that SDDF is competitive with the state-of-the-art neural implicit scene models in terms of reconstruction accuracy and rendering efficiency, while allowing differentiable view prediction for robot trajectory optimization.
DynaGSLAM: Real-Time Gaussian-Splatting SLAM for Online Rendering, Tracking, Motion Predictions of Moving Objects in Dynamic Scenes
Mar 15, 2025



Simultaneous Localization and Mapping (SLAM) is one of the most important environment-perception and navigation algorithms for computer vision, robotics, and autonomous cars/drones. Hence, high quality and fast mapping becomes a fundamental problem. With the advent of 3D Gaussian Splatting (3DGS) as an explicit representation with excellent rendering quality and speed, state-of-the-art (SOTA) works introduce GS to SLAM. Compared to classical pointcloud-SLAM, GS-SLAM generates photometric information by learning from input camera views and synthesize unseen views with high-quality textures. However, these GS-SLAM fail when moving objects occupy the scene that violate the static assumption of bundle adjustment. The failed updates of moving GS affects the static GS and contaminates the full map over long frames. Although some efforts have been made by concurrent works to consider moving objects for GS-SLAM, they simply detect and remove the moving regions from GS rendering ("anti'' dynamic GS-SLAM), where only the static background could benefit from GS. To this end, we propose the first real-time GS-SLAM, "DynaGSLAM'', that achieves high-quality online GS rendering, tracking, motion predictions of moving objects in dynamic scenes while jointly estimating accurate ego motion. Our DynaGSLAM outperforms SOTA static & "Anti'' dynamic GS-SLAM on three dynamic real datasets, while keeping speed and memory efficiency in practice.
Neural Configuration-Space Barriers for Manipulation Planning and Control
Mar 06, 2025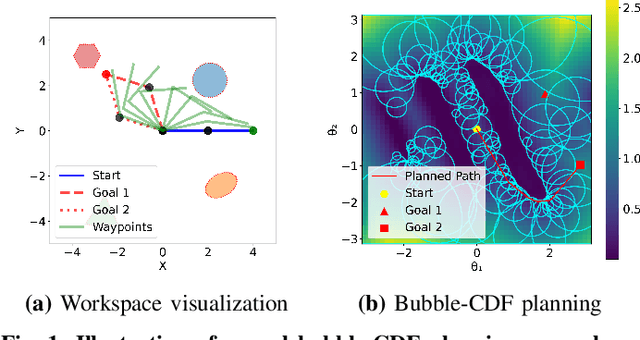
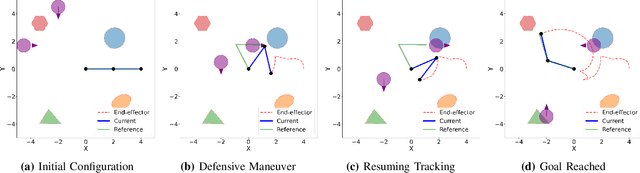
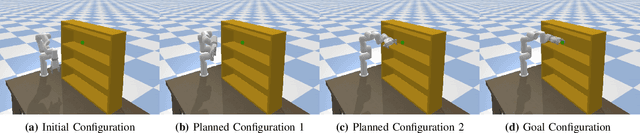
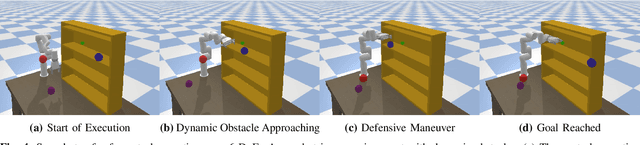
Planning and control for high-dimensional robot manipulators in cluttered, dynamic environments require both computational efficiency and robust safety guarantees. Inspired by recent advances in learning configuration-space distance functions (CDFs) as robot body representations, we propose a unified framework for motion planning and control that formulates safety constraints as CDF barriers. A CDF barrier approximates the local free configuration space, substantially reducing the number of collision-checking operations during motion planning. However, learning a CDF barrier with a neural network and relying on online sensor observations introduce uncertainties that must be considered during control synthesis. To address this, we develop a distributionally robust CDF barrier formulation for control that explicitly accounts for modeling errors and sensor noise without assuming a known underlying distribution. Simulations and hardware experiments on a 6-DoF xArm manipulator show that our neural CDF barrier formulation enables efficient planning and robust real-time safe control in cluttered and dynamic environments, relying only on onboard point-cloud observations.
Safe Bubble Cover for Motion Planning on Distance Fields
Aug 23, 2024We consider the problem of planning collision-free trajectories on distance fields. Our key observation is that querying a distance field at one configuration reveals a region of safe space whose radius is given by the distance value, obviating the need for additional collision checking within the safe region. We refer to such regions as safe bubbles, and show that safe bubbles can be obtained from any Lipschitz-continuous safety constraint. Inspired by sampling-based planning algorithms, we present three algorithms for constructing a safe bubble cover of free space, named bubble roadmap (BRM), rapidly exploring bubble graph (RBG), and expansive bubble graph (EBG). The bubble sampling algorithms are combined with a hierarchical planning method that first computes a discrete path of bubbles, followed by a continuous path within the bubbles computed via convex optimization. Experimental results show that the bubble-based methods yield up to 5- 10 times cost reduction relative to conventional baselines while simultaneously reducing computational efforts by orders of magnitude.
Decentralised Active Perception in Continuous Action Spaces for the Coordinated Escort Problem
May 03, 2023



We consider the coordinated escort problem, where a decentralised team of supporting robots implicitly assist the mission of higher-value principal robots. The defining challenge is how to evaluate the effect of supporting robots' actions on the principal robots' mission. To capture this effect, we define two novel auxiliary reward functions for supporting robots called satisfaction improvement and satisfaction entropy, which computes the improvement in probability of mission success, or the uncertainty thereof. Given these reward functions, we coordinate the entire team of principal and supporting robots using decentralised cross entropy method (Dec-CEM), a new extension of CEM to multi-agent systems based on the product distribution approximation. In a simulated object avoidance scenario, our planning framework demonstrates up to two-fold improvement in task satisfaction against conventional decoupled information gathering.The significance of our results is to introduce a new family of algorithmic problems that will enable important new practical applications of heterogeneous multi-robot systems.
Topological Trajectory Prediction with Homotopy Classes
Jan 24, 2023



Trajectory prediction in a cluttered environment is key to many important robotics tasks such as autonomous navigation. However, there are an infinite number of possible trajectories to consider. To simplify the space of trajectories under consideration, we utilise homotopy classes to partition the space into countably many mathematically equivalent classes. All members within a class demonstrate identical high-level motion with respect to the environment, i.e., travelling above or below an obstacle. This allows high-level prediction of a trajectory in terms of a sparse label identifying its homotopy class. We therefore present a light-weight learning framework based on variable-order Markov processes to learn and predict homotopy classes and thus high-level agent motion. By informing a Gaussian Mixture Model (GMM) with our homotopy class predictions, we see great improvements in low-level trajectory prediction compared to a naive GMM on a real dataset.