 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeKernel-SDF: An Open-Source Library for Real-Time Signed Distance Function Estimation using Kernel Regression
Mar 31, 2026Accurate and efficient environment representation is crucial for robotic applications such as motion planning, manipulation, and navigation. Signed distance functions (SDFs) have emerged as a powerful representation for encoding distance to obstacle boundaries, enabling efficient collision-checking and trajectory optimization techniques. However, existing SDF reconstruction methods have limitations when it comes to large-scale uncertainty-aware SDF estimation from streaming sensor data. Voxel-based approaches are limited by fixed resolution and lack uncertainty quantification, neural network methods require significant training time, while Gaussian process (GP) methods struggle with scalability, sign estimation, and uncertainty calibration. In this letter, we develop an open-source library, Kernel-SDF, which uses kernel regression to learn SDF with calibrated uncertainty quantification in real-time. Our approach consists of a front-end that learns a continuous occupancy field via kernel regression, and a back-end that estimates accurate SDF via GP regression using samples from the front-end surface boundaries. Kernel-SDF provides accurate SDF, SDF gradient, SDF uncertainty, and mesh construction in real-time. Evaluation results show that Kernel-SDF achieves superior accuracy compared to existing methods, while maintaining real-time performance, making it suitable for various robotics applications requiring reliable uncertainty-aware geometric information.
$ abla$-SDF: Learning Euclidean Signed Distance Functions Online with Gradient-Augmented Octree Interpolation and Neural Residual
Oct 21, 2025



Estimation of signed distance functions (SDFs) from point cloud data has been shown to benefit many robot autonomy capabilities, including localization, mapping, motion planning, and control. Methods that support online and large-scale SDF reconstruction tend to rely on discrete volumetric data structures, which affect the continuity and differentiability of the SDF estimates. Recently, using implicit features, neural network methods have demonstrated high-fidelity and differentiable SDF reconstruction but they tend to be less efficient, can experience catastrophic forgetting and memory limitations in large environments, and are often restricted to truncated SDFs. This work proposes $\nabla$-SDF, a hybrid method that combines an explicit prior obtained from gradient-augmented octree interpolation with an implicit neural residual. Our method achieves non-truncated (Euclidean) SDF reconstruction with computational and memory efficiency comparable to volumetric methods and differentiability and accuracy comparable to neural network methods. Extensive experiments demonstrate that \methodname{} outperforms the state of the art in terms of accuracy and efficiency, providing a scalable solution for downstream tasks in robotics and computer vision.
Learning Scene-Level Signed Directional Distance Function with Ellipsoidal Priors and Neural Residuals
Mar 25, 2025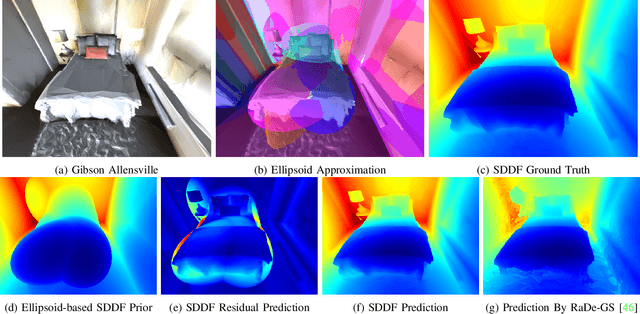
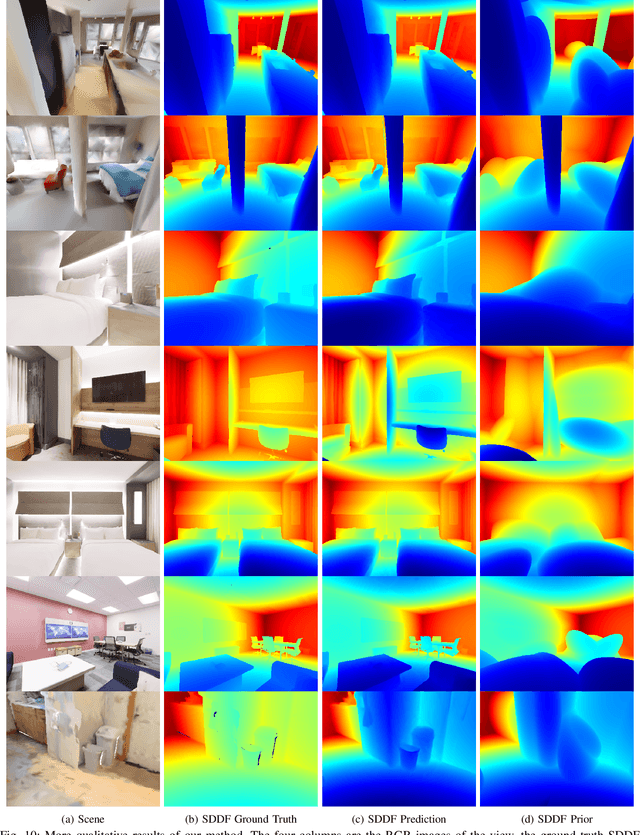

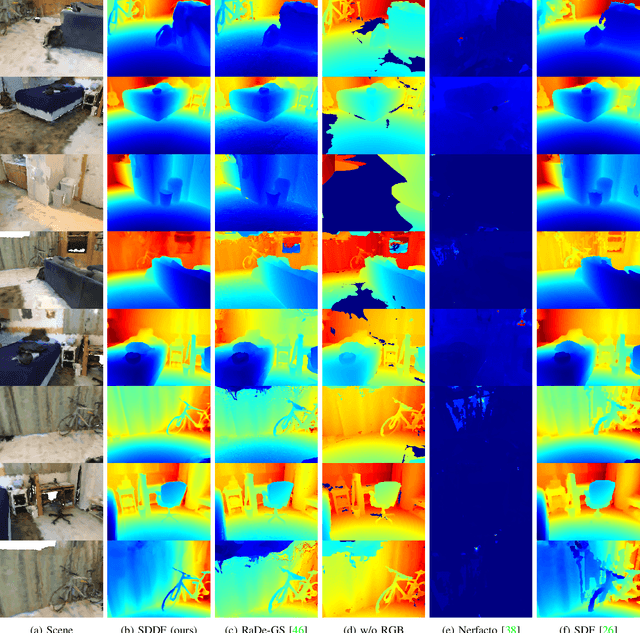
Dense geometric environment representations are critical for autonomous mobile robot navigation and exploration. Recent work shows that implicit continuous representations of occupancy, signed distance, or radiance learned using neural networks offer advantages in reconstruction fidelity, efficiency, and differentiability over explicit discrete representations based on meshes, point clouds, and voxels. In this work, we explore a directional formulation of signed distance, called signed directional distance function (SDDF). Unlike signed distance function (SDF) and similar to neural radiance fields (NeRF), SDDF has a position and viewing direction as input. Like SDF and unlike NeRF, SDDF directly provides distance to the observed surface along the direction, rather than integrating along the view ray, allowing efficient view synthesis. To learn and predict scene-level SDDF efficiently, we develop a differentiable hybrid representation that combines explicit ellipsoid priors and implicit neural residuals. This approach allows the model to effectively handle large distance discontinuities around obstacle boundaries while preserving the ability for dense high-fidelity prediction. We show that SDDF is competitive with the state-of-the-art neural implicit scene models in terms of reconstruction accuracy and rendering efficiency, while allowing differentiable view prediction for robot trajectory optimization.
LTLCodeGen: Code Generation of Syntactically Correct Temporal Logic for Robot Task Planning
Mar 10, 2025



This paper focuses on planning robot navigation tasks from natural language specifications. We develop a modular approach, where a large language model (LLM) translates the natural language instructions into a linear temporal logic (LTL) formula with propositions defined by object classes in a semantic occupancy map. The LTL formula and the semantic occupancy map are provided to a motion planning algorithm to generate a collision-free robot path that satisfies the natural language instructions. Our main contribution is LTLCodeGen, a method to translate natural language to syntactically correct LTL using code generation. We demonstrate the complete task planning method in real-world experiments involving human speech to provide navigation instructions to a mobile robot. We also thoroughly evaluate our approach in simulated and real-world experiments in comparison to end-to-end LLM task planning and state-of-the-art LLM-to-LTL translation methods.
Safe Bubble Cover for Motion Planning on Distance Fields
Aug 23, 2024We consider the problem of planning collision-free trajectories on distance fields. Our key observation is that querying a distance field at one configuration reveals a region of safe space whose radius is given by the distance value, obviating the need for additional collision checking within the safe region. We refer to such regions as safe bubbles, and show that safe bubbles can be obtained from any Lipschitz-continuous safety constraint. Inspired by sampling-based planning algorithms, we present three algorithms for constructing a safe bubble cover of free space, named bubble roadmap (BRM), rapidly exploring bubble graph (RBG), and expansive bubble graph (EBG). The bubble sampling algorithms are combined with a hierarchical planning method that first computes a discrete path of bubbles, followed by a continuous path within the bubbles computed via convex optimization. Experimental results show that the bubble-based methods yield up to 5- 10 times cost reduction relative to conventional baselines while simultaneously reducing computational efforts by orders of magnitude.
Sensor-Based Distributionally Robust Control for Safe Robot Navigation in Dynamic Environments
May 28, 2024We introduce a novel method for safe mobile robot navigation in dynamic, unknown environments, utilizing onboard sensing to impose safety constraints without the need for accurate map reconstruction. Traditional methods typically rely on detailed map information to synthesize safe stabilizing controls for mobile robots, which can be computationally demanding and less effective, particularly in dynamic operational conditions. By leveraging recent advances in distributionally robust optimization, we develop a distributionally robust control barrier function (DR-CBF) constraint that directly processes range sensor data to impose safety constraints. Coupling this with a control Lyapunov function (CLF) for path tracking, we demonstrate that our CLF-DR-CBF control synthesis method achieves safe, efficient, and robust navigation in uncertain dynamic environments. We demonstrate the effectiveness of our approach in simulated and real autonomous robot navigation experiments, marking a substantial advancement in real-time safety guarantees for mobile robots.
Optimal Scene Graph Planning with Large Language Model Guidance
Sep 17, 2023



Recent advances in metric, semantic, and topological mapping have equipped autonomous robots with semantic concept grounding capabilities to interpret natural language tasks. This work aims to leverage these new capabilities with an efficient task planning algorithm for hierarchical metric-semantic models. We consider a scene graph representation of the environment and utilize a large language model (LLM) to convert a natural language task into a linear temporal logic (LTL) automaton. Our main contribution is to enable optimal hierarchical LTL planning with LLM guidance over scene graphs. To achieve efficiency, we construct a hierarchical planning domain that captures the attributes and connectivity of the scene graph and the task automaton, and provide semantic guidance via an LLM heuristic function. To guarantee optimality, we design an LTL heuristic function that is provably consistent and supplements the potentially inadmissible LLM guidance in multi-heuristic planning. We demonstrate efficient planning of complex natural language tasks in scene graphs of virtualized real environments.
BEV-Net: Assessing Social Distancing Compliance by Joint People Localization and Geometric Reasoning
Oct 12, 2021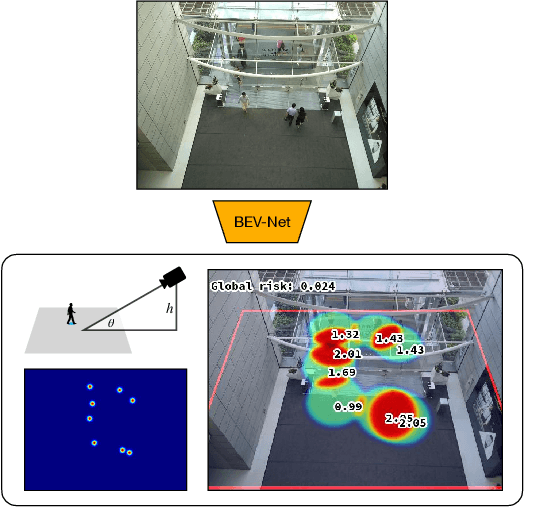
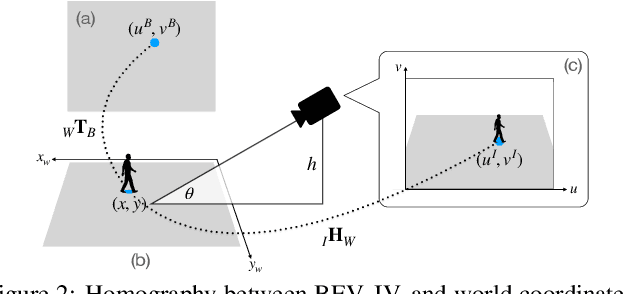
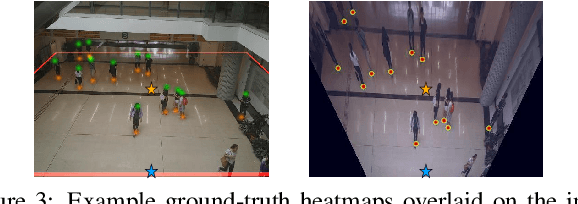
Social distancing, an essential public health measure to limit the spread of contagious diseases, has gained significant attention since the outbreak of the COVID-19 pandemic. In this work, the problem of visual social distancing compliance assessment in busy public areas, with wide field-of-view cameras, is considered. A dataset of crowd scenes with people annotations under a bird's eye view (BEV) and ground truth for metric distances is introduced, and several measures for the evaluation of social distance detection systems are proposed. A multi-branch network, BEV-Net, is proposed to localize individuals in world coordinates and identify high-risk regions where social distancing is violated. BEV-Net combines detection of head and feet locations, camera pose estimation, a differentiable homography module to map image into BEV coordinates, and geometric reasoning to produce a BEV map of the people locations in the scene. Experiments on complex crowded scenes demonstrate the power of the approach and show superior performance over baselines derived from methods in the literature. Applications of interest for public health decision makers are finally discussed. Datasets, code and pretrained models are publicly available at GitHub.