 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Responsibility-Attributed Adversarial Scenarios for Testing Autonomous Vehicles
May 13, 2026Establishing trustworthy safety assurance for autonomous driving systems (ADSs) requires evidence that failures arise from avoidable system deficiencies rather than unavoidable traffic conflicts. Current adversarial simulation methods can efficiently expose collisions, but generally lack mechanisms to distinguish these fundamentally different failure modes. Here we present CARS (Context-Aware, Responsibility-attributed Scenario generation), a framework that integrates responsibility attribution directly into adversarial scenario generation. CARS combines context-aware adversary selection with a generative adversarial policy optimized in closed-loop simulation to construct collision scenarios that are both physically feasible and diagnostically attributable. Across benchmark datasets spanning heterogeneous national traffic environments, CARS consistently discovers feasible collision scenarios with high attribution rates under multiple regulation-prescribed careful and competent driver models. By coupling adversarial generation with normative responsibility assessment, CARS moves simulation testing beyond collision discovery toward the construction of interpretable, regulation-aligned safety evidence for scalable ADS validation.
TeraSim-World: Worldwide Safety-Critical Data Synthesis for End-to-End Autonomous Driving
Sep 16, 2025Safe and scalable deployment of end-to-end (E2E) autonomous driving requires extensive and diverse data, particularly safety-critical events. Existing data are mostly generated from simulators with a significant sim-to-real gap or collected from on-road testing that is costly and unsafe. This paper presents TeraSim-World, an automated pipeline that synthesizes realistic and geographically diverse safety-critical data for E2E autonomous driving at anywhere in the world. Starting from an arbitrary location, TeraSim-World retrieves real-world maps and traffic demand from geospatial data sources. Then, it simulates agent behaviors from naturalistic driving datasets, and orchestrates diverse adversities to create corner cases. Informed by street views of the same location, it achieves photorealistic, geographically grounded sensor rendering via the frontier video generation model Cosmos-Drive. By bridging agent and sensor simulations, TeraSim-World provides a scalable and critical~data synthesis framework for training and evaluation of E2E autonomous driving systems.
Improving Traffic Signal Data Quality for the Waymo Open Motion Dataset
Jun 08, 2025Datasets pertaining to autonomous vehicles (AVs) hold significant promise for a range of research fields, including artificial intelligence (AI), autonomous driving, and transportation engineering. Nonetheless, these datasets often encounter challenges related to the states of traffic signals, such as missing or inaccurate data. Such issues can compromise the reliability of the datasets and adversely affect the performance of models developed using them. This research introduces a fully automated approach designed to tackle these issues by utilizing available vehicle trajectory data alongside knowledge from the transportation domain to effectively impute and rectify traffic signal information within the Waymo Open Motion Dataset (WOMD). The proposed method is robust and flexible, capable of handling diverse intersection geometries and traffic signal configurations in real-world scenarios. Comprehensive validations have been conducted on the entire WOMD, focusing on over 360,000 relevant scenarios involving traffic signals, out of a total of 530,000 real-world driving scenarios. In the original dataset, 71.7% of traffic signal states are either missing or unknown, all of which were successfully imputed by our proposed method. Furthermore, in the absence of ground-truth signal states, the accuracy of our approach is evaluated based on the rate of red-light violations among vehicle trajectories. Results show that our method reduces the estimated red-light running rate from 15.7% in the original data to 2.9%, thereby demonstrating its efficacy in rectifying data inaccuracies. This paper significantly enhances the quality of AV datasets, contributing to the wider AI and AV research communities and benefiting various downstream applications. The code and improved traffic signal data are open-sourced at https://github.com/michigan-traffic-lab/WOMD-Traffic-Signal-Data-Improvement
Behavioral Safety Assessment towards Large-scale Deployment of Autonomous Vehicles
May 22, 2025Autonomous vehicles (AVs) have significantly advanced in real-world deployment in recent years, yet safety continues to be a critical barrier to widespread adoption. Traditional functional safety approaches, which primarily verify the reliability, robustness, and adequacy of AV hardware and software systems from a vehicle-centric perspective, do not sufficiently address the AV's broader interactions and behavioral impact on the surrounding traffic environment. To overcome this limitation, we propose a paradigm shift toward behavioral safety, a comprehensive approach focused on evaluating AV responses and interactions within the traffic environment. To systematically assess behavioral safety, we introduce a third-party AV safety assessment framework comprising two complementary evaluation components: the Driver Licensing Test and the Driving Intelligence Test. The Driver Licensing Test evaluates the AV's reactive behaviors under controlled scenarios, ensuring basic behavioral competency. In contrast, the Driving Intelligence Test assesses the AV's interactive behaviors within naturalistic traffic conditions, quantifying the frequency of safety-critical events to deliver statistically meaningful safety metrics before large-scale deployment. We validated our proposed framework using Autoware.Universe, an open-source Level 4 AV, tested both in simulated environments and on the physical test track at the University of Michigan's Mcity Testing Facility. The results indicate that Autoware.Universe passed 6 out of 14 scenarios and exhibited a crash rate of 3.01e-3 crashes per mile, approximately 1,000 times higher than the average human driver crash rate. During the tests, we also uncovered several unknown unsafe scenarios for Autoware.Universe. These findings underscore the necessity of behavioral safety evaluations for improving AV safety performance prior to widespread public deployment.
RADE: Learning Risk-Adjustable Driving Environment via Multi-Agent Conditional Diffusion
May 06, 2025Generating safety-critical scenarios in high-fidelity simulations offers a promising and cost-effective approach for efficient testing of autonomous vehicles. Existing methods typically rely on manipulating a single vehicle's trajectory through sophisticated designed objectives to induce adversarial interactions, often at the cost of realism and scalability. In this work, we propose the Risk-Adjustable Driving Environment (RADE), a simulation framework that generates statistically realistic and risk-adjustable traffic scenes. Built upon a multi-agent diffusion architecture, RADE jointly models the behavior of all agents in the environment and conditions their trajectories on a surrogate risk measure. Unlike traditional adversarial methods, RADE learns risk-conditioned behaviors directly from data, preserving naturalistic multi-agent interactions with controllable risk levels. To ensure physical plausibility, we incorporate a tokenized dynamics check module that efficiently filters generated trajectories using a motion vocabulary. We validate RADE on the real-world rounD dataset, demonstrating that it preserves statistical realism across varying risk levels and naturally increases the likelihood of safety-critical events as the desired risk level grows up. Our results highlight RADE's potential as a scalable and realistic tool for AV safety evaluation.
TeraSim: Uncovering Unknown Unsafe Events for Autonomous Vehicles through Generative Simulation
Mar 06, 2025



Traffic simulation is essential for autonomous vehicle (AV) development, enabling comprehensive safety evaluation across diverse driving conditions. However, traditional rule-based simulators struggle to capture complex human interactions, while data-driven approaches often fail to maintain long-term behavioral realism or generate diverse safety-critical events. To address these challenges, we propose TeraSim, an open-source, high-fidelity traffic simulation platform designed to uncover unknown unsafe events and efficiently estimate AV statistical performance metrics, such as crash rates. TeraSim is designed for seamless integration with third-party physics simulators and standalone AV stacks, to construct a complete AV simulation system. Experimental results demonstrate its effectiveness in generating diverse safety-critical events involving both static and dynamic agents, identifying hidden deficiencies in AV systems, and enabling statistical performance evaluation. These findings highlight TeraSim's potential as a practical tool for AV safety assessment, benefiting researchers, developers, and policymakers. The code is available at https://github.com/mcity/TeraSim.
CSDO: Enhancing Efficiency and Success in Large-Scale Multi-Vehicle Trajectory Planning
May 31, 2024This paper presents an efficient algorithm, naming Centralized Searching and Decentralized Optimization (CSDO), to find feasible solution for large-scale Multi-Vehicle Trajectory Planning (MVTP) problem. Due to the intractable growth of non-convex constraints with the number of agents, exploring various homotopy classes that imply different convex domains, is crucial for finding a feasible solution. However, existing methods struggle to explore various homotopy classes efficiently due to combining it with time-consuming precise trajectory solution finding. CSDO, addresses this limitation by separating them into different levels and integrating an efficient Multi-Agent Path Finding (MAPF) algorithm to search homotopy classes. It first searches for a coarse initial guess using a large search step, identifying a specific homotopy class. Subsequent decentralized Quadratic Programming (QP) refinement processes this guess, resolving minor collisions efficiently. Experimental results demonstrate that CSDO outperforms existing MVTP algorithms in large-scale, high-density scenarios, achieving up to 95% success rate in 50m $\times$ 50m random scenarios around one second. Source codes are released in https://github.com/YangSVM/CSDOTrajectoryPlanning.
Evaluation of automated driving system safety metrics with logged vehicle trajectory data
Jan 03, 2024Real-time safety metrics are important for the automated driving system (ADS) to assess the risk of driving situations and to assist the decision-making. Although a number of real-time safety metrics have been proposed in the literature, systematic performance evaluation of these safety metrics has been lacking. As different behavioral assumptions are adopted in different safety metrics, it is difficult to compare the safety metrics and evaluate their performance. To overcome this challenge, in this study, we propose an evaluation framework utilizing logged vehicle trajectory data, in that vehicle trajectories for both subject vehicle (SV) and background vehicles (BVs) are obtained and the prediction errors caused by behavioral assumptions can be eliminated. Specifically, we examine whether the SV is in a collision unavoidable situation at each moment, given all near-future trajectories of BVs. In this way, we level the ground for a fair comparison of different safety metrics, as a good safety metric should always alarm in advance to the collision unavoidable moment. When trajectory data from a large number of trips are available, we can systematically evaluate and compare different metrics' statistical performance. In the case study, three representative real-time safety metrics, including the time-to-collision (TTC), the PEGASUS Criticality Metric (PCM), and the Model Predictive Instantaneous Safety Metric (MPrISM), are evaluated using a large-scale simulated trajectory dataset. The proposed evaluation framework is important for researchers, practitioners, and regulators to characterize different metrics, and to select appropriate metrics for different applications. Moreover, by conducting failure analysis on moments when a safety metric failed, we can identify its potential weaknesses which are valuable for its potential refinements and improvements.
A probabilistic model for missing traffic volume reconstruction based on data fusion
May 06, 2021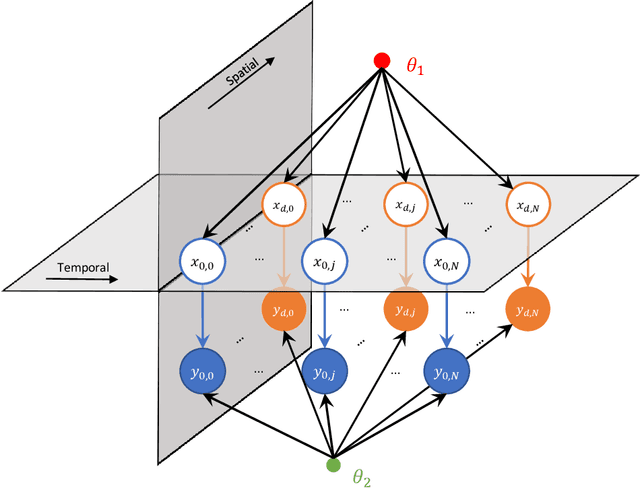
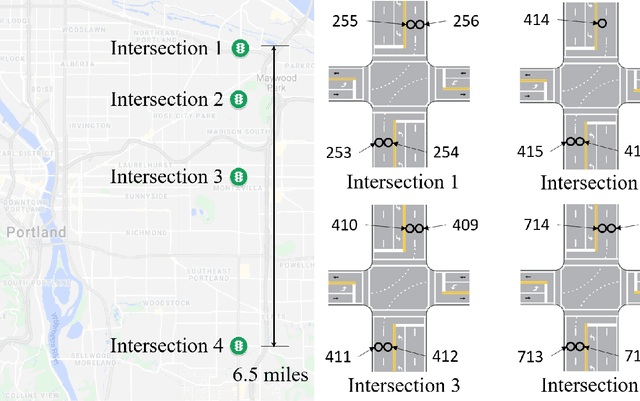
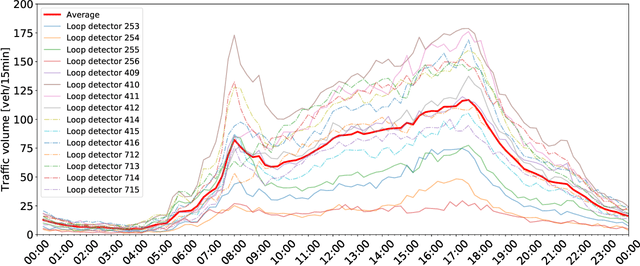
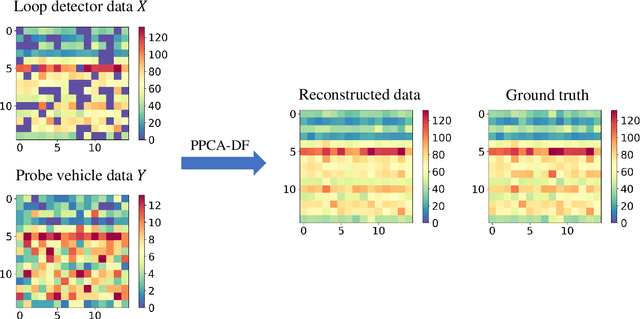
Traffic volume information is critical for intelligent transportation systems. It serves as a key input to transportation planning, roadway design, and traffic signal control. However, the traffic volume data collected by fixed-location sensors, such as loop detectors, often suffer from the missing data problem and low coverage problem. The missing data problem could be caused by hardware malfunction. The low coverage problem is due to the limited coverage of fixed-location sensors in the transportation network, which restrains our understanding of the traffic at the network level. To tackle these problems, we propose a probabilistic model for traffic volume reconstruction by fusing fixed-location sensor data and probe vehicle data. We apply the probabilistic principal component analysis (PPCA) to capture the correlations in traffic volume data. An innovative contribution of this work is that we also integrate probe vehicle data into the framework, which allows the model to solve both of the above-mentioned two problems. Using a real-world traffic volume dataset, we show that the proposed method outperforms state-of-the-art methods for the extensively studied missing data problem. Moreover, for the low coverage problem, which cannot be handled by most existing methods, the proposed model can also achieve high accuracy. The experiments also show that even when the missing ratio reaches 80%, the proposed method can still give an accurate estimate of the unknown traffic volumes with only a 10% probe vehicle penetration rate. The results validate the effectiveness and robustness of the proposed model and demonstrate its potential for practical applications.
Corner Case Generation and Analysis for Safety Assessment of Autonomous Vehicles
Feb 06, 2021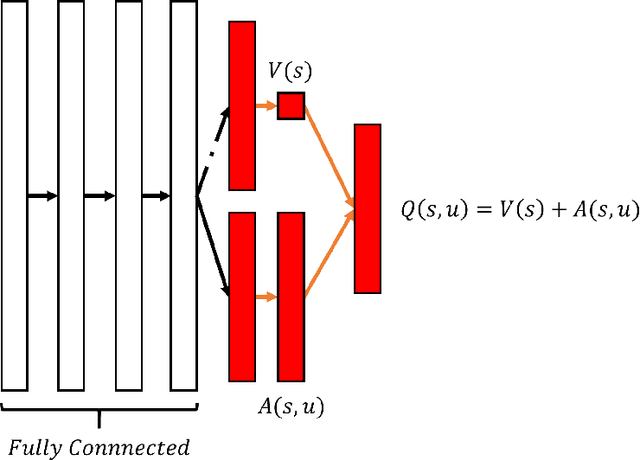
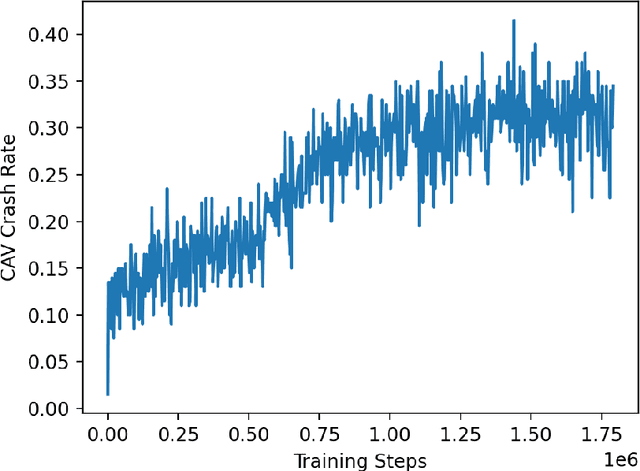
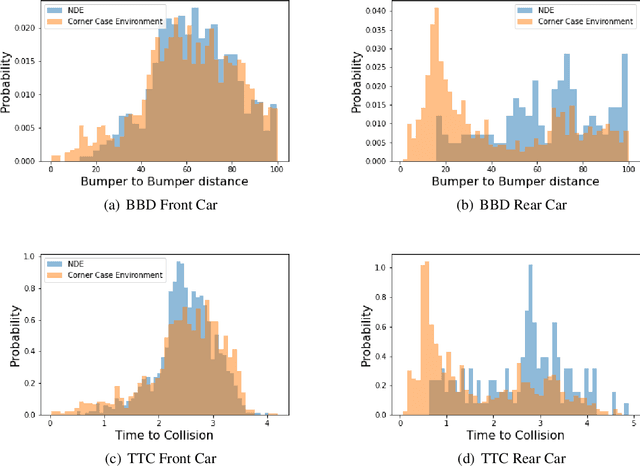

Testing and evaluation is a crucial step in the development and deployment of Connected and Automated Vehicles (CAVs). To comprehensively evaluate the performance of CAVs, it is of necessity to test the CAVs in safety-critical scenarios, which rarely happen in naturalistic driving environment. Therefore, how to purposely and systematically generate these corner cases becomes an important problem. Most existing studies focus on generating adversarial examples for perception systems of CAVs, whereas limited efforts have been put on the decision-making systems, which is the highlight of this paper. As the CAVs need to interact with numerous background vehicles (BVs) for a long duration, variables that define the corner cases are usually high dimensional, which makes the generation a challenging problem. In this paper, a unified framework is proposed to generate corner cases for the decision-making systems. To address the challenge brought by high dimensionality, the driving environment is formulated based on Markov Decision Process, and the deep reinforcement learning techniques are applied to learn the behavior policy of BVs. With the learned policy, BVs will behave and interact with the CAVs more aggressively, resulting in more corner cases. To further analyze the generated corner cases, the techniques of feature extraction and clustering are utilized. By selecting representative cases of each cluster and outliers, the valuable corner cases can be identified from all generated corner cases. Simulation results of a highway driving environment show that the proposed methods can effectively generate and identify the valuable corner cases.