 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards Benchmarking Privacy Vulnerabilities in Selective Forgetting with Large Language Models
Dec 19, 2025The rapid advancements in artificial intelligence (AI) have primarily focused on the process of learning from data to acquire knowledgeable learning systems. As these systems are increasingly deployed in critical areas, ensuring their privacy and alignment with human values is paramount. Recently, selective forgetting (also known as machine unlearning) has shown promise for privacy and data removal tasks, and has emerged as a transformative paradigm shift in the field of AI. It refers to the ability of a model to selectively erase the influence of previously seen data, which is especially important for compliance with modern data protection regulations and for aligning models with human values. Despite its promise, selective forgetting raises significant privacy concerns, especially when the data involved come from sensitive domains. While new unlearning-induced privacy attacks are continuously proposed, each is shown to outperform its predecessors using different experimental settings, which can lead to overly optimistic and potentially unfair assessments that may disproportionately favor one particular attack over the others. In this work, we present the first comprehensive benchmark for evaluating privacy vulnerabilities in selective forgetting. We extensively investigate privacy vulnerabilities of machine unlearning techniques and benchmark privacy leakage across a wide range of victim data, state-of-the-art unlearning privacy attacks, unlearning methods, and model architectures. We systematically evaluate and identify critical factors related to unlearning-induced privacy leakage. With our novel insights, we aim to provide a standardized tool for practitioners seeking to deploy customized unlearning applications with faithful privacy assessments.
Towards Unveiling Predictive Uncertainty Vulnerabilities in the Context of the Right to Be Forgotten
Aug 10, 2025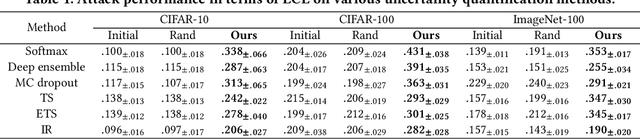
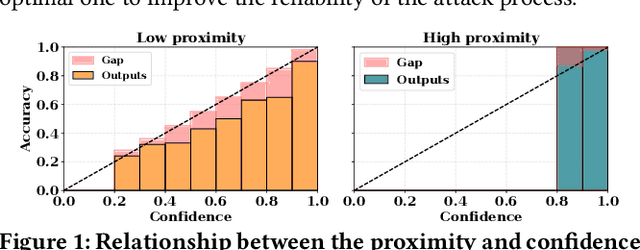
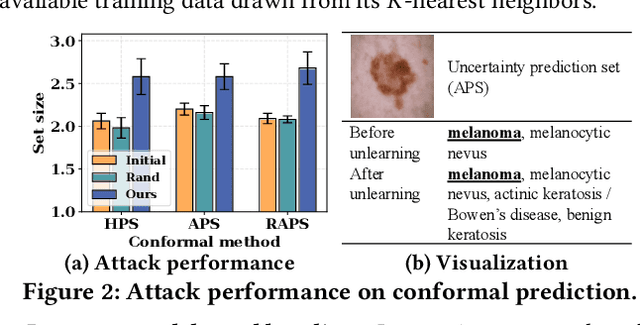
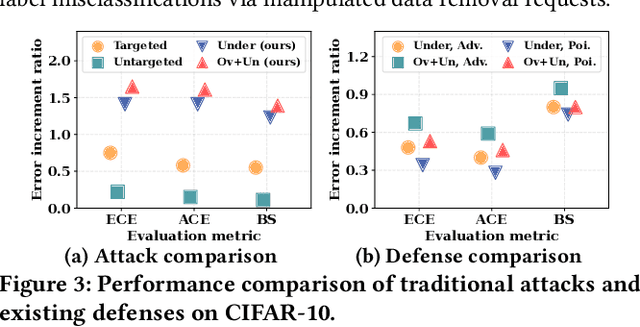
Currently, various uncertainty quantification methods have been proposed to provide certainty and probability estimates for deep learning models' label predictions. Meanwhile, with the growing demand for the right to be forgotten, machine unlearning has been extensively studied as a means to remove the impact of requested sensitive data from a pre-trained model without retraining the model from scratch. However, the vulnerabilities of such generated predictive uncertainties with regard to dedicated malicious unlearning attacks remain unexplored. To bridge this gap, for the first time, we propose a new class of malicious unlearning attacks against predictive uncertainties, where the adversary aims to cause the desired manipulations of specific predictive uncertainty results. We also design novel optimization frameworks for our attacks and conduct extensive experiments, including black-box scenarios. Notably, our extensive experiments show that our attacks are more effective in manipulating predictive uncertainties than traditional attacks that focus on label misclassifications, and existing defenses against conventional attacks are ineffective against our attacks.
Membership Inference Attacks with False Discovery Rate Control
Aug 09, 2025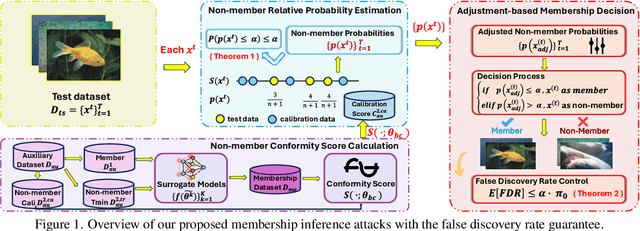
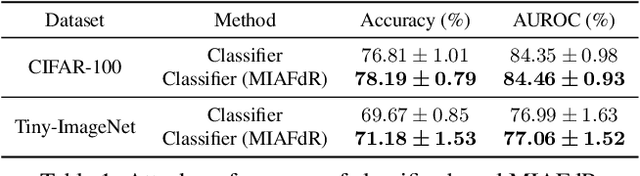
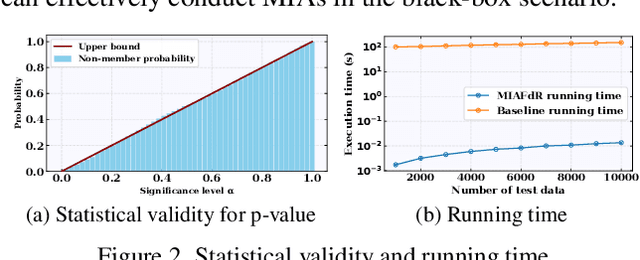
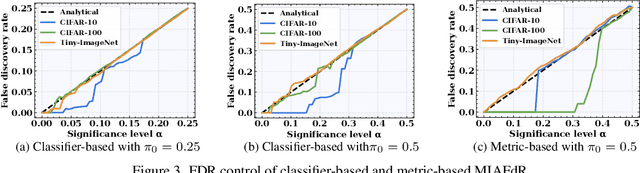
Recent studies have shown that deep learning models are vulnerable to membership inference attacks (MIAs), which aim to infer whether a data record was used to train a target model or not. To analyze and study these vulnerabilities, various MIA methods have been proposed. Despite the significance and popularity of MIAs, existing works on MIAs are limited in providing guarantees on the false discovery rate (FDR), which refers to the expected proportion of false discoveries among the identified positive discoveries. However, it is very challenging to ensure the false discovery rate guarantees, because the underlying distribution is usually unknown, and the estimated non-member probabilities often exhibit interdependence. To tackle the above challenges, in this paper, we design a novel membership inference attack method, which can provide the guarantees on the false discovery rate. Additionally, we show that our method can also provide the marginal probability guarantee on labeling true non-member data as member data. Notably, our method can work as a wrapper that can be seamlessly integrated with existing MIA methods in a post-hoc manner, while also providing the FDR control. We perform the theoretical analysis for our method. Extensive experiments in various settings (e.g., the black-box setting and the lifelong learning setting) are also conducted to verify the desirable performance of our method.
Dense Audio-Visual Event Localization under Cross-Modal Consistency and Multi-Temporal Granularity Collaboration
Dec 17, 2024



In the field of audio-visual learning, most research tasks focus exclusively on short videos. This paper focuses on the more practical Dense Audio-Visual Event Localization (DAVEL) task, advancing audio-visual scene understanding for longer, {untrimmed} videos. This task seeks to identify and temporally pinpoint all events simultaneously occurring in both audio and visual streams. Typically, each video encompasses dense events of multiple classes, which may overlap on the timeline, each exhibiting varied durations. Given these challenges, effectively exploiting the audio-visual relations and the temporal features encoded at various granularities becomes crucial. To address these challenges, we introduce a novel \ul{CC}Net, comprising two core modules: the Cross-Modal Consistency \ul{C}ollaboration (CMCC) and the Multi-Temporal Granularity \ul{C}ollaboration (MTGC). Specifically, the CMCC module contains two branches: a cross-modal interaction branch and a temporal consistency-gated branch. The former branch facilitates the aggregation of consistent event semantics across modalities through the encoding of audio-visual relations, while the latter branch guides one modality's focus to pivotal event-relevant temporal areas as discerned in the other modality. The MTGC module includes a coarse-to-fine collaboration block and a fine-to-coarse collaboration block, providing bidirectional support among coarse- and fine-grained temporal features. Extensive experiments on the UnAV-100 dataset validate our module design, resulting in a new state-of-the-art performance in dense audio-visual event localization. The code is available at \url{https://github.com/zzhhfut/CCNet-AAAI2025}.
Joint Spatial-Temporal Modeling and Contrastive Learning for Self-supervised Heart Rate Measurement
Jun 07, 2024



This paper briefly introduces the solutions developed by our team, HFUT-VUT, for Track 1 of self-supervised heart rate measurement in the 3rd Vision-based Remote Physiological Signal Sensing (RePSS) Challenge hosted at IJCAI 2024. The goal is to develop a self-supervised learning algorithm for heart rate (HR) estimation using unlabeled facial videos. To tackle this task, we present two self-supervised HR estimation solutions that integrate spatial-temporal modeling and contrastive learning, respectively. Specifically, we first propose a non-end-to-end self-supervised HR measurement framework based on spatial-temporal modeling, which can effectively capture subtle rPPG clues and leverage the inherent bandwidth and periodicity characteristics of rPPG to constrain the model. Meanwhile, we employ an excellent end-to-end solution based on contrastive learning, aiming to generalize across different scenarios from complementary perspectives. Finally, we combine the strengths of the above solutions through an ensemble strategy to generate the final predictions, leading to a more accurate HR estimation. As a result, our solutions achieved a remarkable RMSE score of 8.85277 on the test dataset, securing \textbf{2nd place} in Track 1 of the challenge.
Exploring Fairness in Educational Data Mining in the Context of the Right to be Forgotten
May 29, 2024



In education data mining (EDM) communities, machine learning has achieved remarkable success in discovering patterns and structures to tackle educational challenges. Notably, fairness and algorithmic bias have gained attention in learning analytics of EDM. With the increasing demand for the right to be forgotten, there is a growing need for machine learning models to forget sensitive data and its impact, particularly within the realm of EDM. The paradigm of selective forgetting, also known as machine unlearning, has been extensively studied to address this need by eliminating the influence of specific data from a pre-trained model without complete retraining. However, existing research assumes that interactive data removal operations are conducted in secure and reliable environments, neglecting potential malicious unlearning requests to undermine the fairness of machine learning systems. In this paper, we introduce a novel class of selective forgetting attacks designed to compromise the fairness of learning models while maintaining their predictive accuracy, thereby preventing the model owner from detecting the degradation in model performance. Additionally, we propose an innovative optimization framework for selective forgetting attacks, capable of generating malicious unlearning requests across various attack scenarios. We validate the effectiveness of our proposed selective forgetting attacks on fairness through extensive experiments using diverse EDM datasets.
Towards Modeling Uncertainties of Self-explaining Neural Networks via Conformal Prediction
Jan 03, 2024



Despite the recent progress in deep neural networks (DNNs), it remains challenging to explain the predictions made by DNNs. Existing explanation methods for DNNs mainly focus on post-hoc explanations where another explanatory model is employed to provide explanations. The fact that post-hoc methods can fail to reveal the actual original reasoning process of DNNs raises the need to build DNNs with built-in interpretability. Motivated by this, many self-explaining neural networks have been proposed to generate not only accurate predictions but also clear and intuitive insights into why a particular decision was made. However, existing self-explaining networks are limited in providing distribution-free uncertainty quantification for the two simultaneously generated prediction outcomes (i.e., a sample's final prediction and its corresponding explanations for interpreting that prediction). Importantly, they also fail to establish a connection between the confidence values assigned to the generated explanations in the interpretation layer and those allocated to the final predictions in the ultimate prediction layer. To tackle the aforementioned challenges, in this paper, we design a novel uncertainty modeling framework for self-explaining networks, which not only demonstrates strong distribution-free uncertainty modeling performance for the generated explanations in the interpretation layer but also excels in producing efficient and effective prediction sets for the final predictions based on the informative high-level basis explanations. We perform the theoretical analysis for the proposed framework. Extensive experimental evaluation demonstrates the effectiveness of the proposed uncertainty framework.
Regulating Intermediate 3D Features for Vision-Centric Autonomous Driving
Dec 19, 2023



Multi-camera perception tasks have gained significant attention in the field of autonomous driving. However, existing frameworks based on Lift-Splat-Shoot (LSS) in the multi-camera setting cannot produce suitable dense 3D features due to the projection nature and uncontrollable densification process. To resolve this problem, we propose to regulate intermediate dense 3D features with the help of volume rendering. Specifically, we employ volume rendering to process the dense 3D features to obtain corresponding 2D features (e.g., depth maps, semantic maps), which are supervised by associated labels in the training. This manner regulates the generation of dense 3D features on the feature level, providing appropriate dense and unified features for multiple perception tasks. Therefore, our approach is termed Vampire, stands for "Volume rendering As Multi-camera Perception Intermediate feature REgulator". Experimental results on the Occ3D and nuScenes datasets demonstrate that Vampire facilitates fine-grained and appropriate extraction of dense 3D features, and is competitive with existing SOTA methods across diverse downstream perception tasks like 3D occupancy prediction, LiDAR segmentation and 3D objection detection, while utilizing moderate GPU resources. We provide a video demonstration in the supplementary materials and Codes are available at github.com/cskkxjk/Vampire.
An attention-based deep learning network for predicting Platinum resistance in ovarian cancer
Nov 08, 2023



Background: Ovarian cancer is among the three most frequent gynecologic cancers globally. High-grade serous ovarian cancer (HGSOC) is the most common and aggressive histological type. Guided treatment for HGSOC typically involves platinum-based combination chemotherapy, necessitating an assessment of whether the patient is platinum-resistant. The purpose of this study is to propose a deep learning-based method to determine whether a patient is platinum-resistant using multimodal positron emission tomography/computed tomography (PET/CT) images. Methods: 289 patients with HGSOC were included in this study. An end-to-end SE-SPP-DenseNet model was built by adding Squeeze-Excitation Block (SE Block) and Spatial Pyramid Pooling Layer (SPPLayer) to Dense Convolutional Network (DenseNet). Multimodal data from PET/CT images of the regions of interest (ROI) were used to predict platinum resistance in patients. Results: Through five-fold cross-validation, SE-SPP-DenseNet achieved a high accuracy rate and an area under the curve (AUC) in predicting platinum resistance in patients, which were 92.6% and 0.93, respectively. The importance of incorporating SE Block and SPPLayer into the deep learning model, and considering multimodal data was substantiated by carrying out ablation studies and experiments with single modality data. Conclusions: The obtained classification results indicate that our proposed deep learning framework performs better in predicting platinum resistance in patients, which can help gynecologists make better treatment decisions. Keywords: PET/CT, CNN, SE Block, SPP Layer, Platinum resistance, Ovarian cancer
Automated Natural Language Explanation of Deep Visual Neurons with Large Models
Oct 16, 2023



Deep neural networks have exhibited remarkable performance across a wide range of real-world tasks. However, comprehending the underlying reasons for their effectiveness remains a challenging problem. Interpreting deep neural networks through examining neurons offers distinct advantages when it comes to exploring the inner workings of neural networks. Previous research has indicated that specific neurons within deep vision networks possess semantic meaning and play pivotal roles in model performance. Nonetheless, the current methods for generating neuron semantics heavily rely on human intervention, which hampers their scalability and applicability. To address this limitation, this paper proposes a novel post-hoc framework for generating semantic explanations of neurons with large foundation models, without requiring human intervention or prior knowledge. Our framework is designed to be compatible with various model architectures and datasets, facilitating automated and scalable neuron interpretation. Experiments are conducted with both qualitative and quantitative analysis to verify the effectiveness of our proposed approach.