 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSingle Image Texture Translation for Data Augmentation
Jun 25, 2021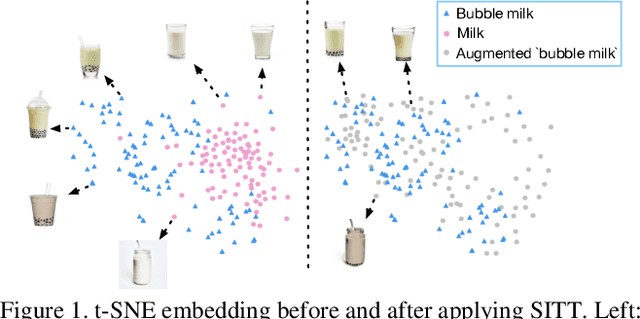
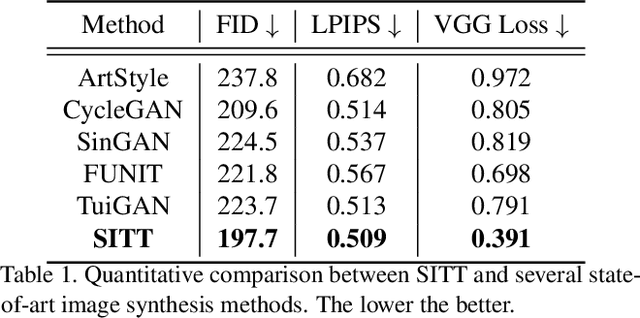
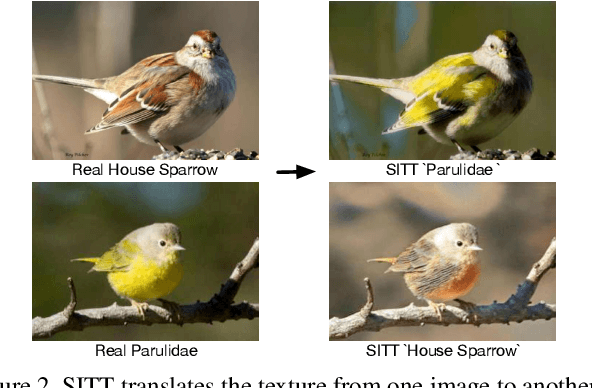
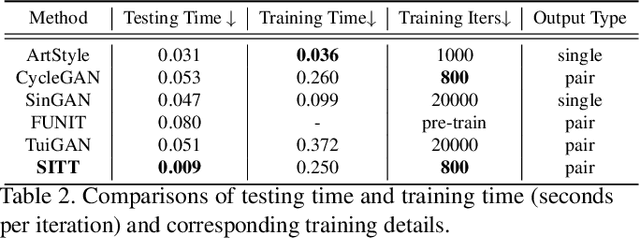
Recent advances in image synthesis enables one to translate images by learning the mapping between a source domain and a target domain. Existing methods tend to learn the distributions by training a model on a variety of datasets, with results evaluated largely in a subjective manner. Relatively few works in this area, however, study the potential use of semantic image translation methods for image recognition tasks. In this paper, we explore the use of Single Image Texture Translation (SITT) for data augmentation. We first propose a lightweight model for translating texture to images based on a single input of source texture, allowing for fast training and testing. Based on SITT, we then explore the use of augmented data in long-tailed and few-shot image classification tasks. We find the proposed method is capable of translating input data into a target domain, leading to consistent improved image recognition performance. Finally, we examine how SITT and related image translation methods can provide a basis for a data-efficient, augmentation engineering approach to model training.
Zero-Shot Detection via Vision and Language Knowledge Distillation
Apr 28, 2021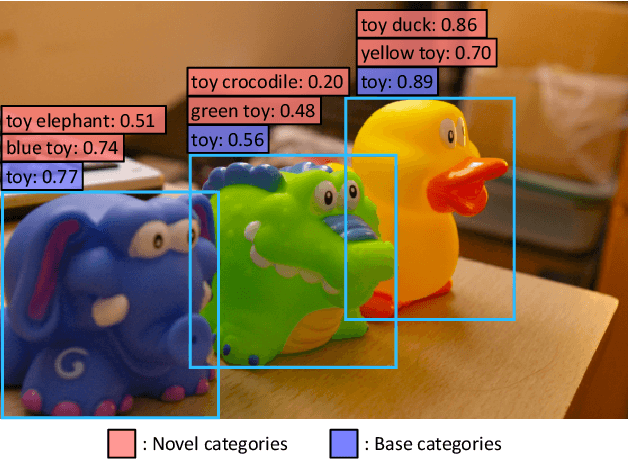
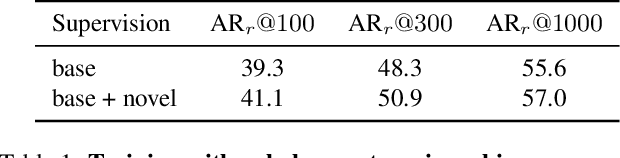
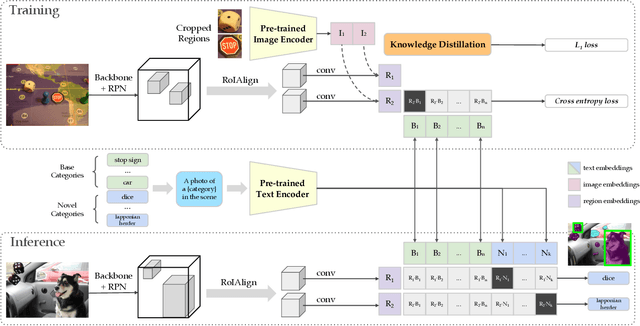
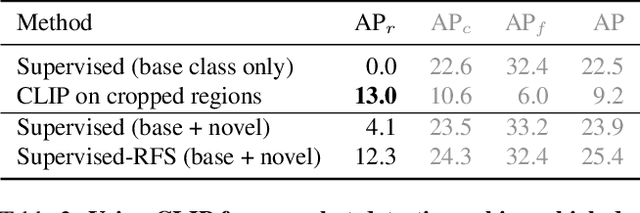
Zero-shot image classification has made promising progress by training the aligned image and text encoders. The goal of this work is to advance zero-shot object detection, which aims to detect novel objects without bounding box nor mask annotations. We propose ViLD, a training method via Vision and Language knowledge Distillation. We distill the knowledge from a pre-trained zero-shot image classification model (e.g., CLIP) into a two-stage detector (e.g., Mask R-CNN). Our method aligns the region embeddings in the detector to the text and image embeddings inferred by the pre-trained model. We use the text embeddings as the detection classifier, obtained by feeding category names into the pre-trained text encoder. We then minimize the distance between the region embeddings and image embeddings, obtained by feeding region proposals into the pre-trained image encoder. During inference, we include text embeddings of novel categories into the detection classifier for zero-shot detection. We benchmark the performance on LVIS dataset by holding out all rare categories as novel categories. ViLD obtains 16.1 mask AP$_r$ with a Mask R-CNN (ResNet-50 FPN) for zero-shot detection, outperforming the supervised counterpart by 3.8. The model can directly transfer to other datasets, achieving 72.2 AP$_{50}$, 36.6 AP and 11.8 AP on PASCAL VOC, COCO and Objects365, respectively.
Revisiting ResNets: Improved Training and Scaling Strategies
Mar 13, 2021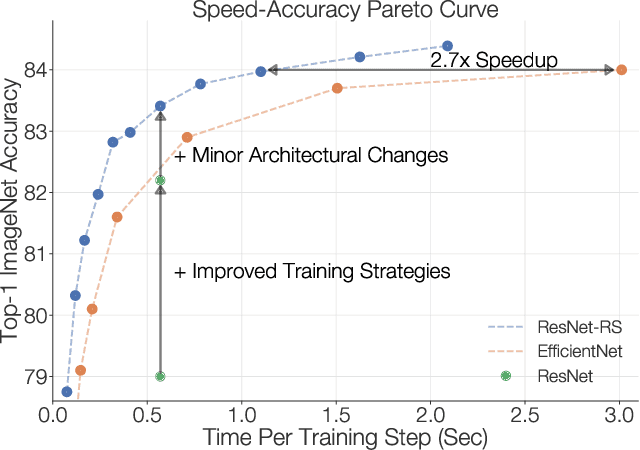
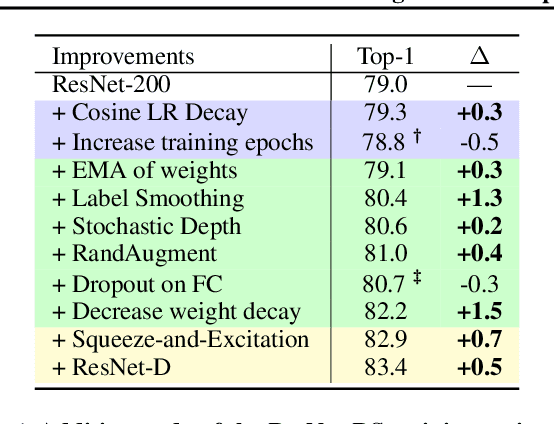
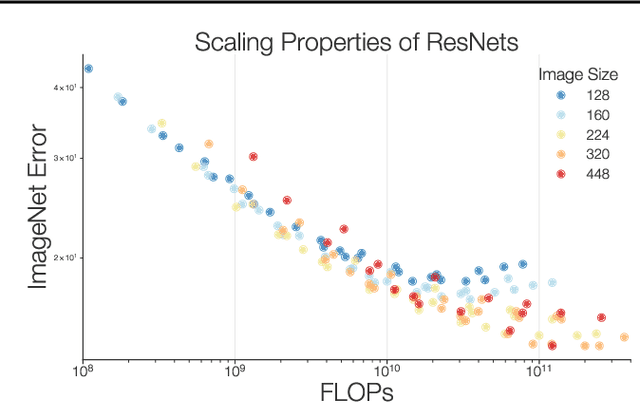
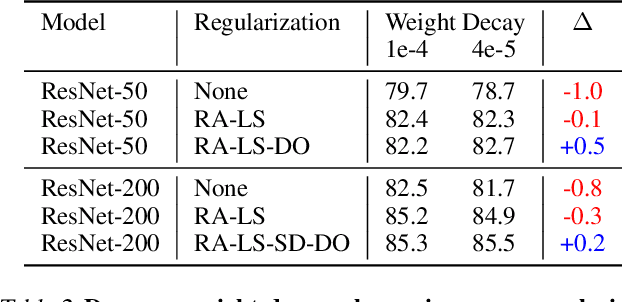
Novel computer vision architectures monopolize the spotlight, but the impact of the model architecture is often conflated with simultaneous changes to training methodology and scaling strategies. Our work revisits the canonical ResNet (He et al., 2015) and studies these three aspects in an effort to disentangle them. Perhaps surprisingly, we find that training and scaling strategies may matter more than architectural changes, and further, that the resulting ResNets match recent state-of-the-art models. We show that the best performing scaling strategy depends on the training regime and offer two new scaling strategies: (1) scale model depth in regimes where overfitting can occur (width scaling is preferable otherwise); (2) increase image resolution more slowly than previously recommended (Tan & Le, 2019). Using improved training and scaling strategies, we design a family of ResNet architectures, ResNet-RS, which are 1.7x - 2.7x faster than EfficientNets on TPUs, while achieving similar accuracies on ImageNet. In a large-scale semi-supervised learning setup, ResNet-RS achieves 86.2% top-1 ImageNet accuracy, while being 4.7x faster than EfficientNet NoisyStudent. The training techniques improve transfer performance on a suite of downstream tasks (rivaling state-of-the-art self-supervised algorithms) and extend to video classification on Kinetics-400. We recommend practitioners use these simple revised ResNets as baselines for future research.
Bottleneck Transformers for Visual Recognition
Jan 27, 2021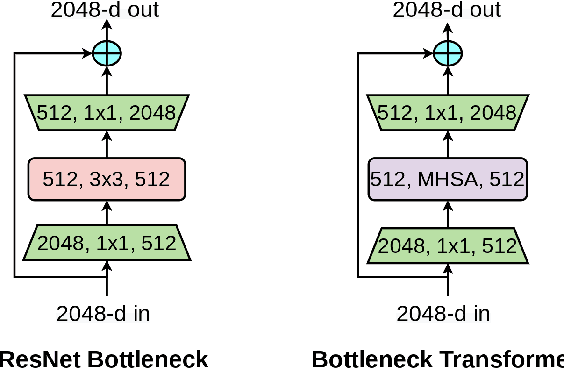
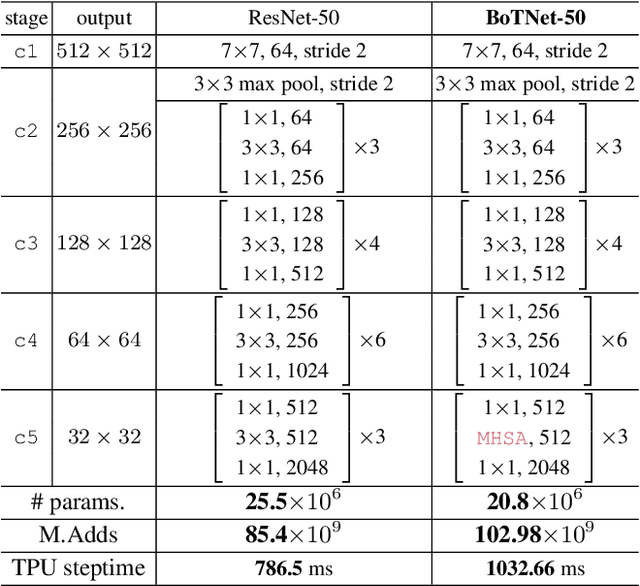
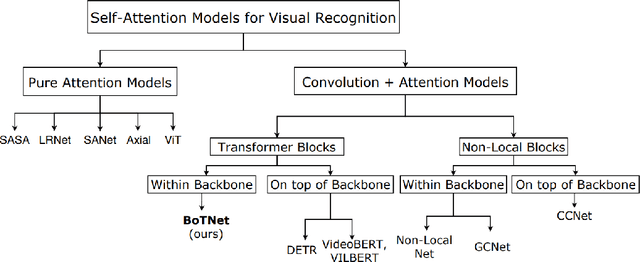
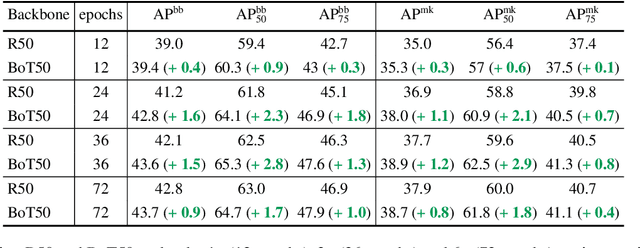
We present BoTNet, a conceptually simple yet powerful backbone architecture that incorporates self-attention for multiple computer vision tasks including image classification, object detection and instance segmentation. By just replacing the spatial convolutions with global self-attention in the final three bottleneck blocks of a ResNet and no other changes, our approach improves upon the baselines significantly on instance segmentation and object detection while also reducing the parameters, with minimal overhead in latency. Through the design of BoTNet, we also point out how ResNet bottleneck blocks with self-attention can be viewed as Transformer blocks. Without any bells and whistles, BoTNet achieves 44.4% Mask AP and 49.7% Box AP on the COCO Instance Segmentation benchmark using the Mask R-CNN framework; surpassing the previous best published single model and single scale results of ResNeSt evaluated on the COCO validation set. Finally, we present a simple adaptation of the BoTNet design for image classification, resulting in models that achieve a strong performance of 84.7% top-1 accuracy on the ImageNet benchmark while being up to 2.33x faster in compute time than the popular EfficientNet models on TPU-v3 hardware. We hope our simple and effective approach will serve as a strong baseline for future research in self-attention models for vision.
Simple Copy-Paste is a Strong Data Augmentation Method for Instance Segmentation
Dec 13, 2020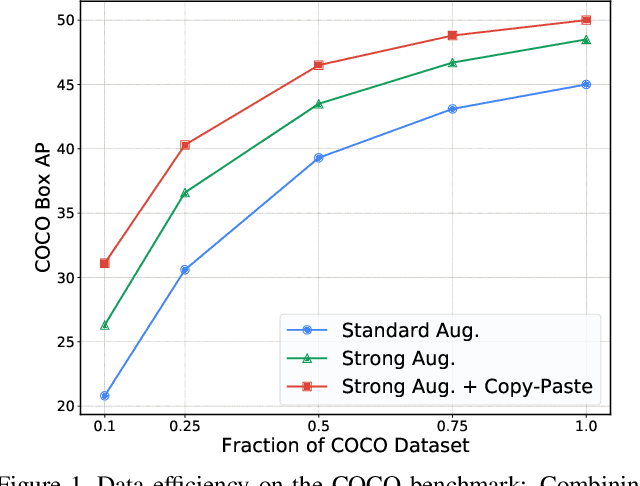
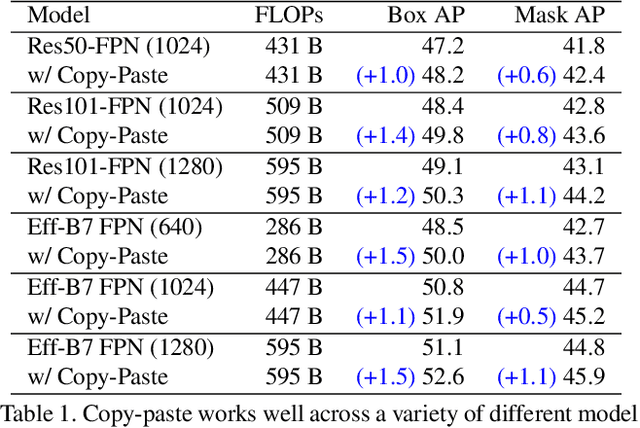
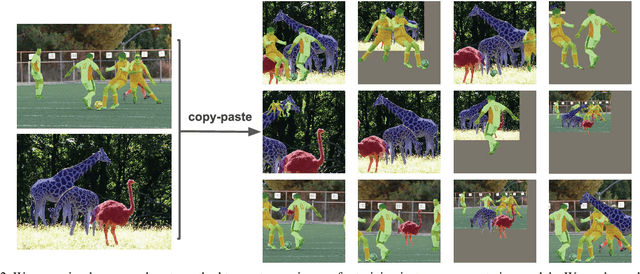
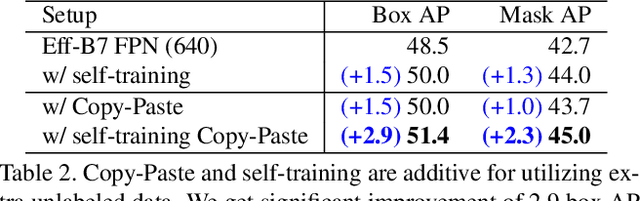
Building instance segmentation models that are data-efficient and can handle rare object categories is an important challenge in computer vision. Leveraging data augmentations is a promising direction towards addressing this challenge. Here, we perform a systematic study of the Copy-Paste augmentation ([13, 12]) for instance segmentation where we randomly paste objects onto an image. Prior studies on Copy-Paste relied on modeling the surrounding visual context for pasting the objects. However, we find that the simple mechanism of pasting objects randomly is good enough and can provide solid gains on top of strong baselines. Furthermore, we show Copy-Paste is additive with semi-supervised methods that leverage extra data through pseudo labeling (e.g. self-training). On COCO instance segmentation, we achieve 49.1 mask AP and 57.3 box AP, an improvement of +0.6 mask AP and +1.5 box AP over the previous state-of-the-art. We further demonstrate that Copy-Paste can lead to significant improvements on the LVIS benchmark. Our baseline model outperforms the LVIS 2020 Challenge winning entry by +3.6 mask AP on rare categories.
iNeRF: Inverting Neural Radiance Fields for Pose Estimation
Dec 10, 2020
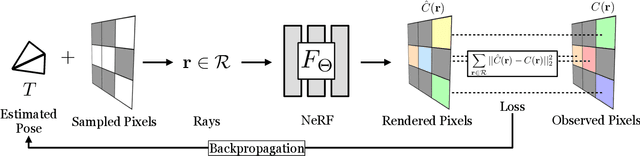
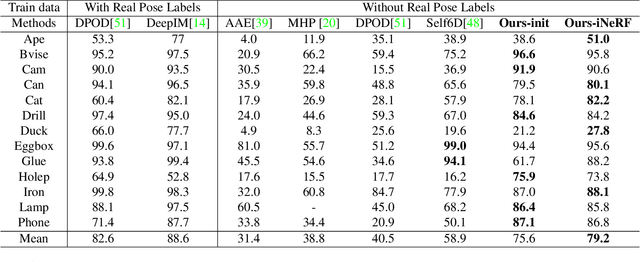
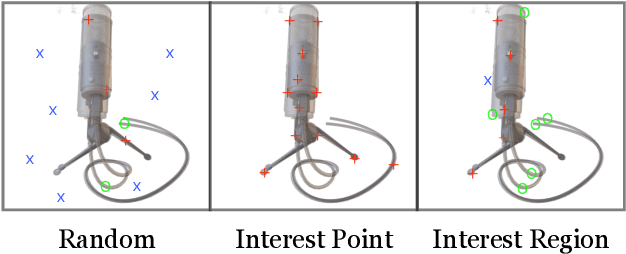
We present iNeRF, a framework that performs pose estimation by "inverting" a trained Neural Radiance Field (NeRF). NeRFs have been shown to be remarkably effective for the task of view synthesis - synthesizing photorealistic novel views of real-world scenes or objects. In this work, we investigate whether we can apply analysis-by-synthesis with NeRF for 6DoF pose estimation - given an image, find the translation and rotation of a camera relative to a 3D model. Starting from an initial pose estimate, we use gradient descent to minimize the residual between pixels rendered from an already-trained NeRF and pixels in an observed image. In our experiments, we first study 1) how to sample rays during pose refinement for iNeRF to collect informative gradients and 2) how different batch sizes of rays affect iNeRF on a synthetic dataset. We then show that for complex real-world scenes from the LLFF dataset, iNeRF can improve NeRF by estimating the camera poses of novel images and using these images as additional training data for NeRF. Finally, we show iNeRF can be combined with feature-based pose initialization. The approach outperforms all other RGB-based methods relying on synthetic data on LineMOD.
Efficient Scale-Permuted Backbone with Learned Resource Distribution
Oct 22, 2020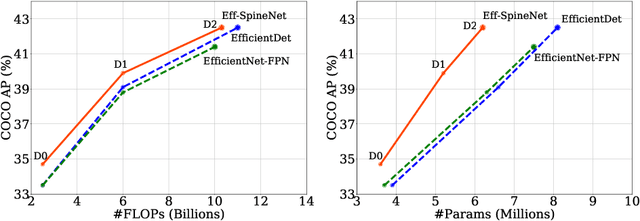
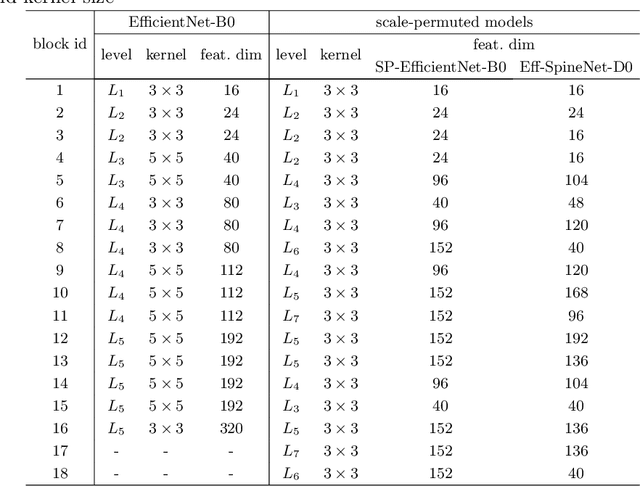
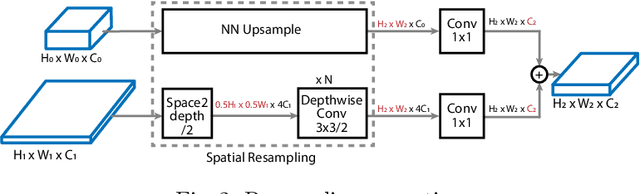
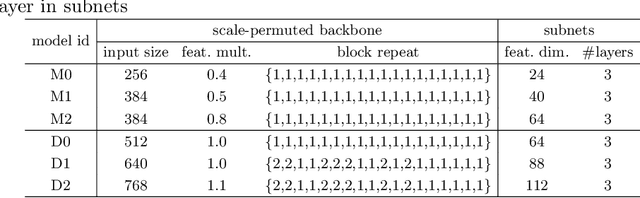
Recently, SpineNet has demonstrated promising results on object detection and image classification over ResNet model. However, it is unclear if the improvement adds up when combining scale-permuted backbone with advanced efficient operations and compound scaling. Furthermore, SpineNet is built with a uniform resource distribution over operations. While this strategy seems to be prevalent for scale-decreased models, it may not be an optimal design for scale-permuted models. In this work, we propose a simple technique to combine efficient operations and compound scaling with a previously learned scale-permuted architecture. We demonstrate the efficiency of scale-permuted model can be further improved by learning a resource distribution over the entire network. The resulting efficient scale-permuted models outperform state-of-the-art EfficientNet-based models on object detection and achieve competitive performance on image classification and semantic segmentation. Code and models will be open-sourced soon.
SoDA: Multi-Object Tracking with Soft Data Association
Aug 19, 2020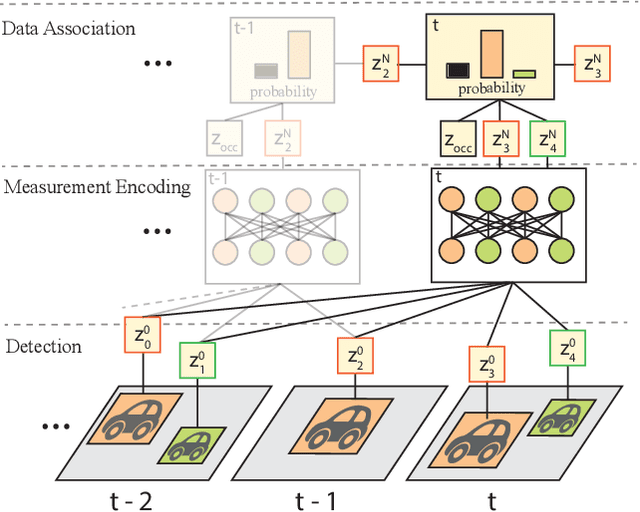
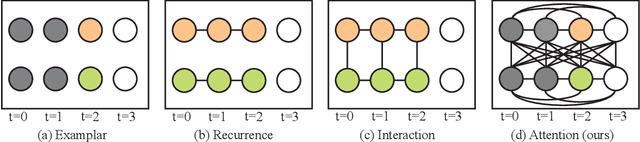
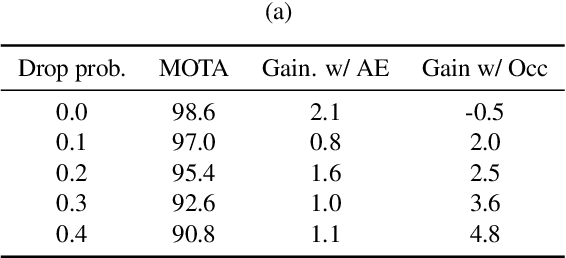
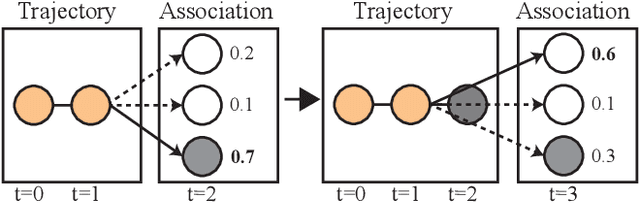
Robust multi-object tracking (MOT) is a prerequisite fora safe deployment of self-driving cars. Tracking objects, however, remains a highly challenging problem, especially in cluttered autonomous driving scenes in which objects tend to interact with each other in complex ways and frequently get occluded. We propose a novel approach to MOT that uses attention to compute track embeddings that encode the spatiotemporal dependencies between observed objects. This attention measurement encoding allows our model to relax hard data associations, which may lead to unrecoverable errors. Instead, our model aggregates information from all object detections via soft data associations. The resulting latent space representation allows our model to learn to reason about occlusions in a holistic data-driven way and maintain track estimates for objects even when they are occluded. Our experimental results on the Waymo OpenDataset suggest that our approach leverages modern large-scale datasets and performs favorably compared to the state of the art in visual multi-object tracking.
Mask2CAD: 3D Shape Prediction by Learning to Segment and Retrieve
Jul 26, 2020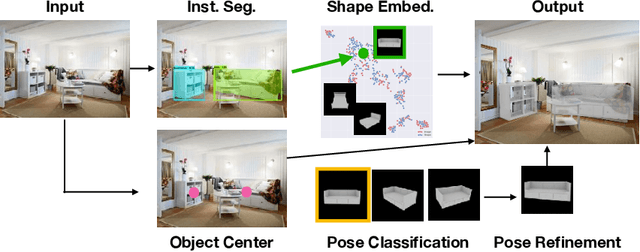
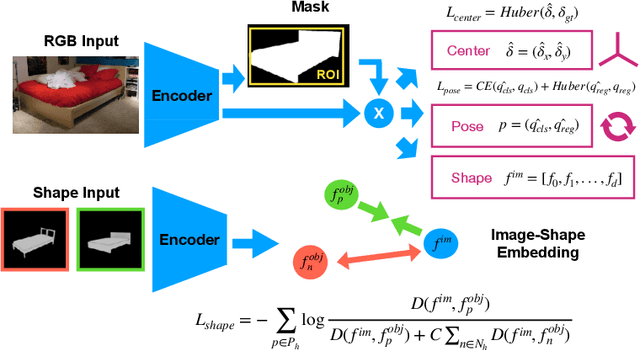
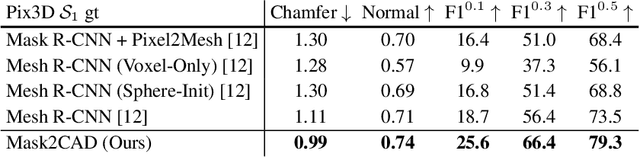
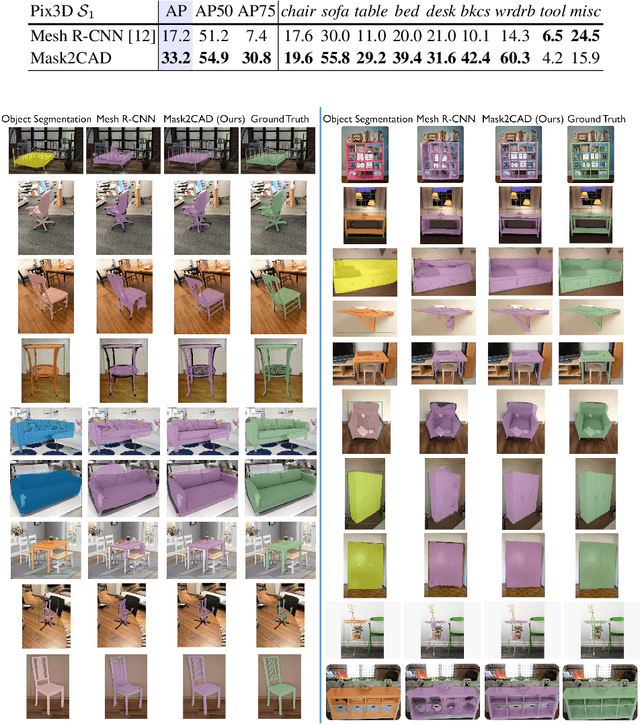
Object recognition has seen significant progress in the image domain, with focus primarily on 2D perception. We propose to leverage existing large-scale datasets of 3D models to understand the underlying 3D structure of objects seen in an image by constructing a CAD-based representation of the objects and their poses. We present Mask2CAD, which jointly detects objects in real-world images and for each detected object, optimizes for the most similar CAD model and its pose. We construct a joint embedding space between the detected regions of an image corresponding to an object and 3D CAD models, enabling retrieval of CAD models for an input RGB image. This produces a clean, lightweight representation of the objects in an image; this CAD-based representation ensures a valid, efficient shape representation for applications such as content creation or interactive scenarios, and makes a step towards understanding the transformation of real-world imagery to a synthetic domain. Experiments on real-world images from Pix3D demonstrate the advantage of our approach in comparison to state of the art. To facilitate future research, we additionally propose a new image-to-3D baseline on ScanNet which features larger shape diversity, real-world occlusions, and challenging image views.
Rethinking Pre-training and Self-training
Jun 11, 2020
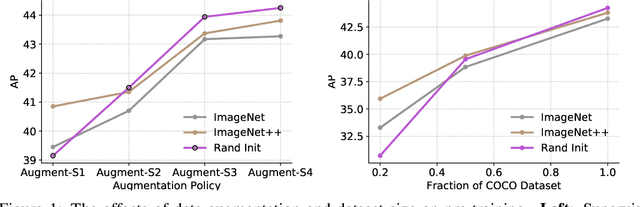

Pre-training is a dominant paradigm in computer vision. For example, supervised ImageNet pre-training is commonly used to initialize the backbones of object detection and segmentation models. He et al., however, show a surprising result that ImageNet pre-training has limited impact on COCO object detection. Here we investigate self-training as another method to utilize additional data on the same setup and contrast it against ImageNet pre-training. Our study reveals the generality and flexibility of self-training with three additional insights: 1) stronger data augmentation and more labeled data further diminish the value of pre-training, 2) unlike pre-training, self-training is always helpful when using stronger data augmentation, in both low-data and high-data regimes, and 3) in the case that pre-training is helpful, self-training improves upon pre-training. For example, on the COCO object detection dataset, pre-training benefits when we use one fifth of the labeled data, and hurts accuracy when we use all labeled data. Self-training, on the other hand, shows positive improvements from +1.3 to +3.4AP across all dataset sizes. In other words, self-training works well exactly on the same setup that pre-training does not work (using ImageNet to help COCO). On the PASCAL segmentation dataset, which is a much smaller dataset than COCO, though pre-training does help significantly, self-training improves upon the pre-trained model. On COCO object detection, we achieve 54.3AP, an improvement of +1.5AP over the strongest SpineNet model. On PASCAL segmentation, we achieve 90.5 mIOU, an improvement of +1.5% mIOU over the previous state-of-the-art result by DeepLabv3+.