 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGeometric Hyena Networks for Large-scale Equivariant Learning
May 28, 2025



Processing global geometric context while preserving equivariance is crucial when modeling biological, chemical, and physical systems. Yet, this is challenging due to the computational demands of equivariance and global context at scale. Standard methods such as equivariant self-attention suffer from quadratic complexity, while local methods such as distance-based message passing sacrifice global information. Inspired by the recent success of state-space and long-convolutional models, we introduce Geometric Hyena, the first equivariant long-convolutional model for geometric systems. Geometric Hyena captures global geometric context at sub-quadratic complexity while maintaining equivariance to rotations and translations. Evaluated on all-atom property prediction of large RNA molecules and full protein molecular dynamics, Geometric Hyena outperforms existing equivariant models while requiring significantly less memory and compute that equivariant self-attention. Notably, our model processes the geometric context of 30k tokens 20x faster than the equivariant transformer and allows 72x longer context within the same budget.
TrafficLLM: Enhancing Large Language Models for Network Traffic Analysis with Generic Traffic Representation
Apr 05, 2025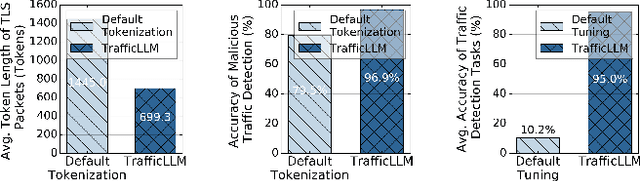
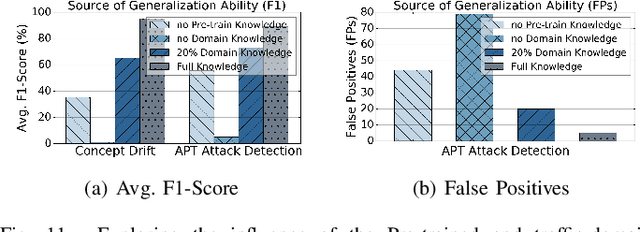
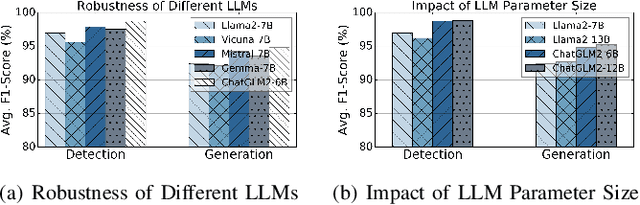
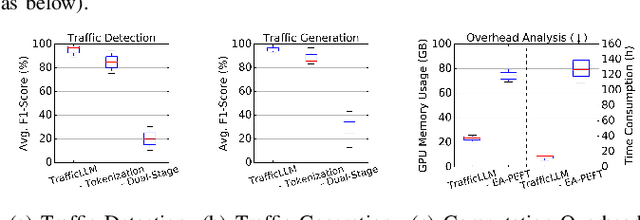
Machine learning (ML) powered network traffic analysis has been widely used for the purpose of threat detection. Unfortunately, their generalization across different tasks and unseen data is very limited. Large language models (LLMs), known for their strong generalization capabilities, have shown promising performance in various domains. However, their application to the traffic analysis domain is limited due to significantly different characteristics of network traffic. To address the issue, in this paper, we propose TrafficLLM, which introduces a dual-stage fine-tuning framework to learn generic traffic representation from heterogeneous raw traffic data. The framework uses traffic-domain tokenization, dual-stage tuning pipeline, and extensible adaptation to help LLM release generalization ability on dynamic traffic analysis tasks, such that it enables traffic detection and traffic generation across a wide range of downstream tasks. We evaluate TrafficLLM across 10 distinct scenarios and 229 types of traffic. TrafficLLM achieves F1-scores of 0.9875 and 0.9483, with up to 80.12% and 33.92% better performance than existing detection and generation methods. It also shows strong generalization on unseen traffic with an 18.6% performance improvement. We further evaluate TrafficLLM in real-world scenarios. The results confirm that TrafficLLM is easy to scale and achieves accurate detection performance on enterprise traffic.
InfoSEM: A Deep Generative Model with Informative Priors for Gene Regulatory Network Inference
Mar 06, 2025



Inferring Gene Regulatory Networks (GRNs) from gene expression data is crucial for understanding biological processes. While supervised models are reported to achieve high performance for this task, they rely on costly ground truth (GT) labels and risk learning gene-specific biases, such as class imbalances of GT interactions, rather than true regulatory mechanisms. To address these issues, we introduce InfoSEM, an unsupervised generative model that leverages textual gene embeddings as informative priors, improving GRN inference without GT labels. InfoSEM can also integrate GT labels as an additional prior when available, avoiding biases and further enhancing performance. Additionally, we propose a biologically motivated benchmarking framework that better reflects real-world applications such as biomarker discovery and reveals learned biases of existing supervised methods. InfoSEM outperforms existing models by 38.5% across four datasets using textual embeddings prior and further boosts performance by 11.1% when integrating labeled data as priors.
Generalist World Model Pre-Training for Efficient Reinforcement Learning
Feb 26, 2025Sample-efficient robot learning is a longstanding goal in robotics. Inspired by the success of scaling in vision and language, the robotics community is now investigating large-scale offline datasets for robot learning. However, existing methods often require expert and/or reward-labeled task-specific data, which can be costly and limit their application in practice. In this paper, we consider a more realistic setting where the offline data consists of reward-free and non-expert multi-embodiment offline data. We show that generalist world model pre-training (WPT), together with retrieval-based experience rehearsal and execution guidance, enables efficient reinforcement learning (RL) and fast task adaptation with such non-curated data. In experiments over 72 visuomotor tasks, spanning 6 different embodiments, covering hard exploration, complex dynamics, and various visual properties, WPT achieves 35.65% and 35% higher aggregated score compared to widely used learning-from-scratch baselines, respectively.
Evaluating Image Caption via Cycle-consistent Text-to-Image Generation
Jan 08, 2025



Evaluating image captions typically relies on reference captions, which are costly to obtain and exhibit significant diversity and subjectivity. While reference-free evaluation metrics have been proposed, most focus on cross-modal evaluation between captions and images. Recent research has revealed that the modality gap generally exists in the representation of contrastive learning-based multi-modal systems, undermining the reliability of cross-modality metrics like CLIPScore. In this paper, we propose CAMScore, a cyclic reference-free automatic evaluation metric for image captioning models. To circumvent the aforementioned modality gap, CAMScore utilizes a text-to-image model to generate images from captions and subsequently evaluates these generated images against the original images. Furthermore, to provide fine-grained information for a more comprehensive evaluation, we design a three-level evaluation framework for CAMScore that encompasses pixel-level, semantic-level, and objective-level perspectives. Extensive experiment results across multiple benchmark datasets show that CAMScore achieves a superior correlation with human judgments compared to existing reference-based and reference-free metrics, demonstrating the effectiveness of the framework.
LogEval: A Comprehensive Benchmark Suite for Large Language Models In Log Analysis
Jul 02, 2024



Log analysis is crucial for ensuring the orderly and stable operation of information systems, particularly in the field of Artificial Intelligence for IT Operations (AIOps). Large Language Models (LLMs) have demonstrated significant potential in natural language processing tasks. In the AIOps domain, they excel in tasks such as anomaly detection, root cause analysis of faults, operations and maintenance script generation, and alert information summarization. However, the performance of current LLMs in log analysis tasks remains inadequately validated. To address this gap, we introduce LogEval, a comprehensive benchmark suite designed to evaluate the capabilities of LLMs in various log analysis tasks for the first time. This benchmark covers tasks such as log parsing, log anomaly detection, log fault diagnosis, and log summarization. LogEval evaluates each task using 4,000 publicly available log data entries and employs 15 different prompts for each task to ensure a thorough and fair assessment. By rigorously evaluating leading LLMs, we demonstrate the impact of various LLM technologies on log analysis performance, focusing on aspects such as self-consistency and few-shot contextual learning. We also discuss findings related to model quantification, Chinese-English question-answering evaluation, and prompt engineering. These findings provide insights into the strengths and weaknesses of LLMs in multilingual environments and the effectiveness of different prompt strategies. Various evaluation methods are employed for different tasks to accurately measure the performance of LLMs in log analysis, ensuring a comprehensive assessment. The insights gained from LogEvals evaluation reveal the strengths and limitations of LLMs in log analysis tasks, providing valuable guidance for researchers and practitioners.
Enabling Regional Explainability by Automatic and Model-agnostic Rule Extraction
Jun 25, 2024



In Explainable AI, rule extraction translates model knowledge into logical rules, such as IF-THEN statements, crucial for understanding patterns learned by black-box models. This could significantly aid in fields like disease diagnosis, disease progression estimation, or drug discovery. However, such application domains often contain imbalanced data, with the class of interest underrepresented. Existing methods inevitably compromise the performance of rules for the minor class to maximise the overall performance. As the first attempt in this field, we propose a model-agnostic approach for extracting rules from specific subgroups of data, featuring automatic rule generation for numerical features. This method enhances the regional explainability of machine learning models and offers wider applicability compared to existing methods. We additionally introduce a new method for selecting features to compose rules, reducing computational costs in high-dimensional spaces. Experiments across various datasets and models demonstrate the effectiveness of our methods.
Harmonizing Generalization and Personalization in Federated Prompt Learning
May 16, 2024



Federated Prompt Learning (FPL) incorporates large pre-trained Vision-Language models (VLM) into federated learning through prompt tuning. The transferable representations and remarkable generalization capacity of VLM make them highly compatible with the integration of federated learning. Addressing data heterogeneity in federated learning requires personalization, but excessive focus on it across clients could compromise the model's ability to generalize effectively. To preserve the impressive generalization capability of VLM, it is crucial to strike a balance between personalization and generalization in FPL. To tackle this challenge, we proposed Federated Prompt Learning with CLIP Generalization and low-rank Personalization (FedPGP), which employs pre-trained CLIP to provide knowledge-guidance on the global prompt for improved generalization and incorporates a low-rank adaptation term to personalize the global prompt. Further, FedPGP integrates a prompt-wise contrastive loss to achieve knowledge guidance and personalized adaptation simultaneously, enabling a harmonious balance between personalization and generalization in FPL. We conduct extensive experiments on various datasets to explore base-to-novel generalization in both category-level and domain-level scenarios with heterogeneous data, showing the superiority of FedPGP in balancing generalization and personalization.
Representation Learning of Daily Movement Data Using Text Encoders
May 07, 2024



Time-series representation learning is a key area of research for remote healthcare monitoring applications. In this work, we focus on a dataset of recordings of in-home activity from people living with Dementia. We design a representation learning method based on converting activity to text strings that can be encoded using a language model fine-tuned to transform data from the same participants within a $30$-day window to similar embeddings in the vector space. This allows for clustering and vector searching over participants and days, and the identification of activity deviations to aid with personalised delivery of care.
* Accepted at ICLR 2024 Workshop on Learning from Time Series For Health: https://openreview.net/forum?id=mmxNNwxvWG
Risk Taxonomy, Mitigation, and Assessment Benchmarks of Large Language Model Systems
Jan 11, 2024



Large language models (LLMs) have strong capabilities in solving diverse natural language processing tasks. However, the safety and security issues of LLM systems have become the major obstacle to their widespread application. Many studies have extensively investigated risks in LLM systems and developed the corresponding mitigation strategies. Leading-edge enterprises such as OpenAI, Google, Meta, and Anthropic have also made lots of efforts on responsible LLMs. Therefore, there is a growing need to organize the existing studies and establish comprehensive taxonomies for the community. In this paper, we delve into four essential modules of an LLM system, including an input module for receiving prompts, a language model trained on extensive corpora, a toolchain module for development and deployment, and an output module for exporting LLM-generated content. Based on this, we propose a comprehensive taxonomy, which systematically analyzes potential risks associated with each module of an LLM system and discusses the corresponding mitigation strategies. Furthermore, we review prevalent benchmarks, aiming to facilitate the risk assessment of LLM systems. We hope that this paper can help LLM participants embrace a systematic perspective to build their responsible LLM systems.