 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeD-BDM: A Direct and Efficient Boundary-Based Occupancy Grid Mapping Framework for LiDARs
Apr 14, 2026Efficient and scalable 3D occupancy mapping is essential for autonomous robot applications in unknown environments. However, traditional occupancy grid representations suffer from two fundamental limitations. First, explicitly storing all voxels in three-dimensional space leads to prohibitive memory consumption. Second, exhaustive ray casting incurs high update latency. A recent representation alleviate memory demands by maintaining only the voxels on the two-dimensional boundary, yet they still rely on full ray casting updates. This work advances the boundary-based framework with a highly efficient update scheme. We introduce a truncated ray casting strategy that restricts voxel traversal to the exterior of the boundary, which dramatically reduces the number of updated voxels. In addition, we propose a direct boundary update mechanism that removes the need for an auxiliary local 3D occupancy grid, further reducing memory usage and simplifying the map update pipeline. We name our framework as D-BDM. Extensive evaluations on public datasets demonstrate that our approach achieves significantly lower update time and reduced memory consumption compared with the baseline methods, as well as the prior boundary-based approach.
Memory-Efficient Boundary Map for Large-Scale Occupancy Grid Mapping
Mar 23, 2026Determining the occupancy status of locations in the environment is a fundamental task for safety-critical robotic applications. Traditional occupancy grid mapping methods subdivide the environment into a grid of voxels, each associated with one of three occupancy states: free, occupied, or unknown. These methods explicitly maintain all voxels within the mapped volume and determine the occupancy state of a location by directly querying the corresponding voxel that the location falls within. However, maintaining all grid voxels in high-resolution and large-scale scenarios requires substantial memory resources. In this paper, we introduce a novel representation that only maintains the boundary of the mapped volume. Specifically, we explicitly represent the boundary voxels, such as the occupied voxels and frontier voxels, while free and unknown voxels are automatically represented by volumes within or outside the boundary, respectively. As our representation maintains only a closed surface in two-dimensional (2D) space, instead of the entire volume in three-dimensional (3D) space, it significantly reduces memory consumption. Then, based on this 2D representation, we propose a method to determine the occupancy state of arbitrary locations in the 3D environment. We term this method as boundary map. Besides, we design a novel data structure for maintaining the boundary map, supporting efficient occupancy state queries. Theoretical analyses of the occupancy state query algorithm are also provided. Furthermore, to enable efficient construction and updates of the boundary map from the real-time sensor measurements, we propose a global-local mapping framework and corresponding update algorithms. Finally, we will make our implementation of the boundary map open-source on GitHub to benefit the community:https://github.com/hku-mars/BDM.
Bubble Explorer: Fast UAV Exploration in Large-Scale and Cluttered 3D-Environments using Occlusion-Free Spheres
Apr 03, 2023



Autonomous exploration is a crucial aspect of robotics that has numerous applications. Most of the existing methods greedily choose goals that maximize immediate reward. This strategy is computationally efficient but insufficient for overall exploration efficiency. In recent years, some state-of-the-art methods are proposed, which generate a global coverage path and significantly improve overall exploration efficiency. However, global optimization produces high computational overhead, leading to low-frequency planner updates and inconsistent planning motion. In this work, we propose a novel method to support fast UAV exploration in large-scale and cluttered 3-D environments. We introduce a computationally low-cost viewpoints generation method using novel occlusion-free spheres. Additionally, we combine greedy strategy with global optimization, which considers both computational and exploration efficiency. We benchmark our method against state-of-the-art methods to showcase its superiority in terms of exploration efficiency and computational time. We conduct various real-world experiments to demonstrate the excellent performance of our method in large-scale and cluttered environments.
MARSIM: A light-weight point-realistic simulator for LiDAR-based UAVs
Dec 01, 2022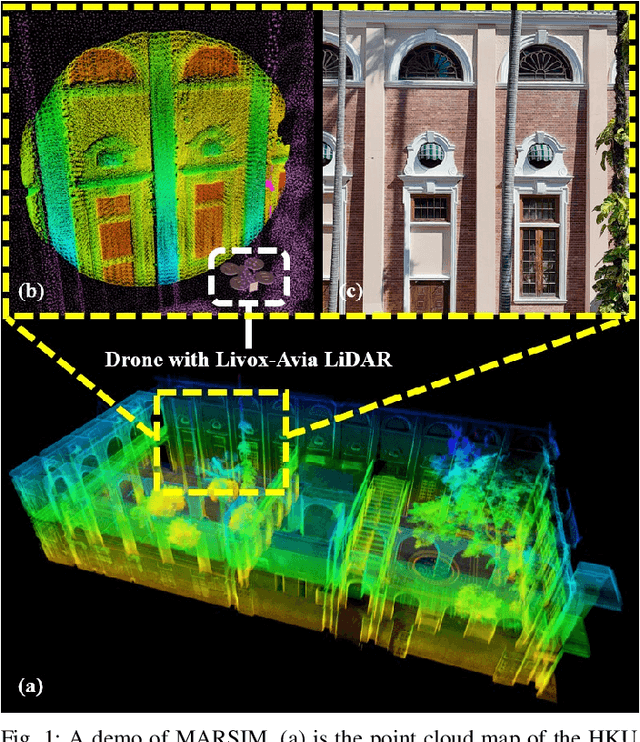
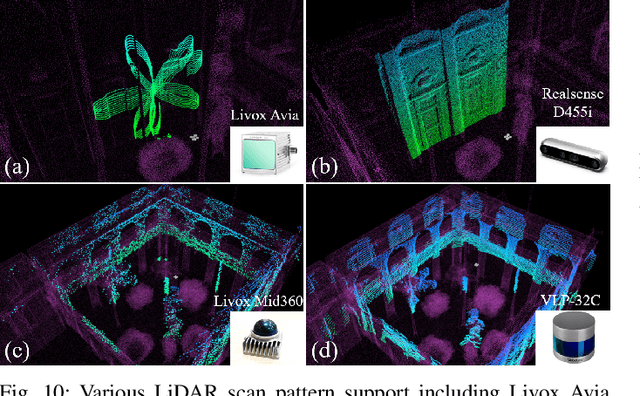
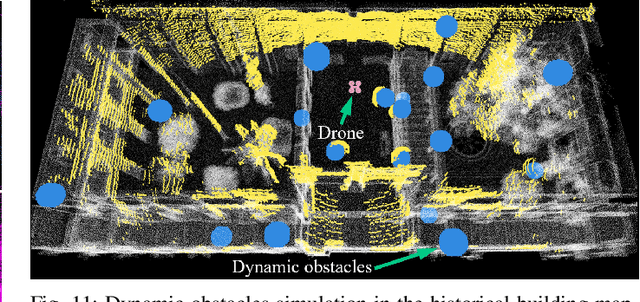
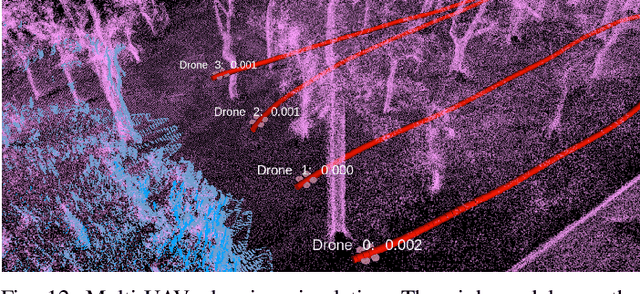
The emergence of low-cost, small form factor and light-weight solid-state LiDAR sensors have brought new opportunities for autonomous unmanned aerial vehicles (UAVs) by advancing navigation safety and computation efficiency. Yet the successful developments of LiDAR-based UAVs must rely on extensive simulations. Existing simulators can hardly perform simulations of real-world environments due to the requirements of dense mesh maps that are difficult to obtain. In this paper, we develop a point-realistic simulator of real-world scenes for LiDAR-based UAVs. The key idea is the underlying point rendering method, where we construct a depth image directly from the point cloud map and interpolate it to obtain realistic LiDAR point measurements. Our developed simulator is able to run on a light-weight computing platform and supports the simulation of LiDARs with different resolution and scanning patterns, dynamic obstacles, and multi-UAV systems. Developed in the ROS framework, the simulator can easily communicate with other key modules of an autonomous robot, such as perception, state estimation, planning, and control. Finally, the simulator provides 10 high-resolution point cloud maps of various real-world environments, including forests of different densities, historic building, office, parking garage, and various complex indoor environments. These realistic maps provide diverse testing scenarios for an autonomous UAV. Evaluation results show that the developed simulator achieves superior performance in terms of time and memory consumption against Gazebo and that the simulated UAV flights highly match the actual one in real-world environments. We believe such a point-realistic and light-weight simulator is crucial to bridge the gap between UAV simulation and experiments and will significantly facilitate the research of LiDAR-based autonomous UAVs in the future.