 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCapability Self-Assessment: Teaching LLMs to Know Their Limits
May 29, 2026The ability to recognize one's own limitations and decide whether to solve a problem or delegate is fundamental for reliable intelligent systems. Yet we show that modern large language models systematically lack this ability: across diverse model families and scales, they overestimate their competence and attempt queries they cannot solve. We refer to this ability as Capability Self-Assessment (CSA) and formulate it as a policy-learning problem, aiming to improve self-assessment while preserving the model's original capabilities. Our results show that reinforcement learning teaches CSA effectively, significantly outperforming supervised fine-tuning while preserving original capabilities. In contrast, supervised fine-tuning severely degrades the capabilities the model is meant to assess. Moreover, learned self-assessment behavior generalizes well out of distribution, suggesting that CSA is a transferable model trait. Finally, CSA is practically useful: it improves local-cloud decision making at inference time and provides a signal for targeted data selection during training.
Transform-Augmented GRPO Improves Pass@k
Jan 30, 2026Large language models trained via next-token prediction are fundamentally pattern-matchers: sensitive to superficial phrasing variations even when the underlying problem is identical. Group Relative Policy Optimization (GRPO) was designed to improve reasoning, but in fact it worsens this situation through two failure modes: diversity collapse, where training amplifies a single solution strategy while ignoring alternatives of gradient signal, and gradient diminishing, where a large portion of questions yield zero gradients because all rollouts receive identical rewards. We propose TA-GRPO (Transform-Augmented GRPO), which generates semantically equivalent transformed variants of each question (via paraphrasing, variable renaming, and format changes) and computes advantages by pooling rewards across the entire group. This pooled computation ensures mixed rewards even when the original question is too easy or too hard, while training on diverse phrasings promotes multiple solution strategies. We provide theoretical justification showing that TA-GRPO reduces zero-gradient probability and improves generalization via reduced train-test distribution shift. Experiments on mathematical reasoning benchmarks show consistent Pass@k improvements, with gains up to 9.84 points on competition math (AMC12, AIME24) and 5.05 points on out-of-distribution scientific reasoning (GPQA-Diamond).
GeoMotionGPT: Geometry-Aligned Motion Understanding with Large Language Models
Jan 12, 2026Discrete motion tokenization has recently enabled Large Language Models (LLMs) to serve as versatile backbones for motion understanding and motion-language reasoning. However, existing pipelines typically decouple motion quantization from semantic embedding learning, linking them solely via token IDs. This approach fails to effectively align the intrinsic geometry of the motion space with the embedding space, thereby hindering the LLM's capacity for nuanced motion reasoning. We argue that alignment is most effective when both modalities share a unified geometric basis. Therefore, instead of forcing the LLM to reconstruct the complex geometry among motion tokens from scratch, we present a novel framework that explicitly enforces orthogonality on both the motion codebook and the LLM embedding space, ensuring that their relational structures naturally mirror each other. Specifically, we employ a decoder-only quantizer with Gumbel-Softmax for differentiable training and balanced codebook usage. To bridge the modalities, we use a sparse projection that maps motion codes into the LLM embedding space while preserving orthogonality. Finally, a two-stage orthonormal regularization schedule enforces soft constraints during tokenizer training and LLM fine-tuning to maintain geometric alignment without hindering semantic adaptation. Extensive experiments on HumanML3D demonstrate that our framework achieves a 20% performance improvement over current state-of-the-art methods, validating that a unified geometric basis effectively empowers the LLM for nuanced motion reasoning.
Dynamic Bayesian Optimization Framework for Instruction Tuning in Partial Differential Equation Discovery
Dec 31, 2025Large Language Models (LLMs) show promise for equation discovery, yet their outputs are highly sensitive to prompt phrasing, a phenomenon we term instruction brittleness. Static prompts cannot adapt to the evolving state of a multi-step generation process, causing models to plateau at suboptimal solutions. To address this, we propose NeuroSymBO, which reframes prompt engineering as a sequential decision problem. Our method maintains a discrete library of reasoning strategies and uses Bayesian Optimization to select the optimal instruction at each step based on numerical feedback. Experiments on PDE discovery benchmarks show that adaptive instruction selection significantly outperforms fixed prompts, achieving higher recovery rates with more parsimonious solutions.
HyperEdit: Unlocking Instruction-based Text Editing in LLMs via Hypernetworks
Dec 14, 2025Instruction-based text editing is increasingly critical for real-world applications such as code editors (e.g., Cursor), but Large Language Models (LLMs) continue to struggle with this task. Unlike free-form generation, editing requires faithfully implementing user instructions while preserving unchanged content, as even minor unintended modifications can break functionality. Existing approaches treat editing as generic text generation, leading to two key failures: they struggle to faithfully align edits with diverse user intents, and they often over-edit unchanged regions. We propose HyperEdit to address both issues. First, we introduce hypernetwork-based dynamic adaptation that generates request-specific parameters, enabling the model to tailor its editing strategy to each instruction. Second, we develop difference-aware regularization that focuses supervision on modified spans, preventing over-editing while ensuring precise, minimal changes. HyperEdit achieves a 9%--30% relative improvement in BLEU on modified regions over state-of-the-art baselines, despite utilizing only 3B parameters.
Cost-Aware Contrastive Routing for LLMs
Aug 17, 2025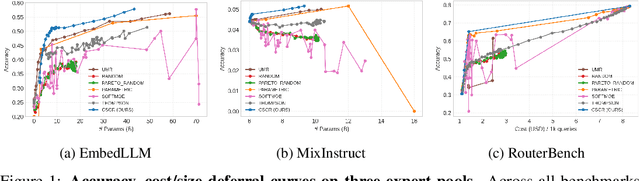
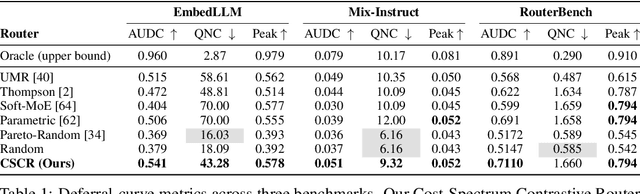

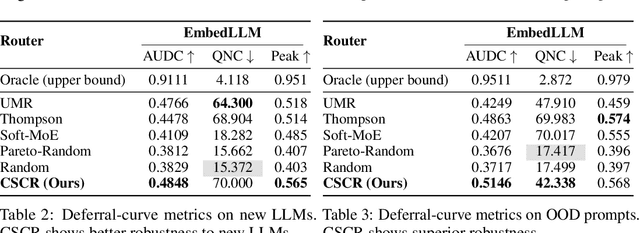
We study cost-aware routing for large language models across diverse and dynamic pools of models. Existing approaches often overlook prompt-specific context, rely on expensive model profiling, assume a fixed set of experts, or use inefficient trial-and-error strategies. We introduce Cost-Spectrum Contrastive Routing (CSCR), a lightweight framework that maps both prompts and models into a shared embedding space to enable fast, cost-sensitive selection. CSCR uses compact, fast-to-compute logit footprints for open-source models and perplexity fingerprints for black-box APIs. A contrastive encoder is trained to favor the cheapest accurate expert within adaptive cost bands. At inference time, routing reduces to a single k-NN lookup via a FAISS index, requiring no retraining when the expert pool changes and enabling microsecond latency. Across multiple benchmarks, CSCR consistently outperforms baselines, improving the accuracy-cost tradeoff by up to 25%, while generalizing robustly to unseen LLMs and out-of-distribution prompts.
ALTER: All-in-One Layer Pruning and Temporal Expert Routing for Efficient Diffusion Generation
May 27, 2025Diffusion models have demonstrated exceptional capabilities in generating high-fidelity images. However, their iterative denoising process results in significant computational overhead during inference, limiting their practical deployment in resource-constrained environments. Existing acceleration methods often adopt uniform strategies that fail to capture the temporal variations during diffusion generation, while the commonly adopted sequential pruning-then-fine-tuning strategy suffers from sub-optimality due to the misalignment between pruning decisions made on pretrained weights and the model's final parameters. To address these limitations, we introduce ALTER: All-in-One Layer Pruning and Temporal Expert Routing, a unified framework that transforms diffusion models into a mixture of efficient temporal experts. ALTER achieves a single-stage optimization that unifies layer pruning, expert routing, and model fine-tuning by employing a trainable hypernetwork, which dynamically generates layer pruning decisions and manages timestep routing to specialized, pruned expert sub-networks throughout the ongoing fine-tuning of the UNet. This unified co-optimization strategy enables significant efficiency gains while preserving high generative quality. Specifically, ALTER achieves same-level visual fidelity to the original 50-step Stable Diffusion v2.1 model while utilizing only 25.9% of its total MACs with just 20 inference steps and delivering a 3.64x speedup through 35% sparsity.
Any Large Language Model Can Be a Reliable Judge: Debiasing with a Reasoning-based Bias Detector
May 21, 2025



LLM-as-a-Judge has emerged as a promising tool for automatically evaluating generated outputs, but its reliability is often undermined by potential biases in judgment. Existing efforts to mitigate these biases face key limitations: in-context learning-based methods fail to address rooted biases due to the evaluator's limited capacity for self-reflection, whereas fine-tuning is not applicable to all evaluator types, especially closed-source models. To address this challenge, we introduce the Reasoning-based Bias Detector (RBD), which is a plug-in module that identifies biased evaluations and generates structured reasoning to guide evaluator self-correction. Rather than modifying the evaluator itself, RBD operates externally and engages in an iterative process of bias detection and feedback-driven revision. To support its development, we design a complete pipeline consisting of biased dataset construction, supervision collection, distilled reasoning-based fine-tuning of RBD, and integration with LLM evaluators. We fine-tune four sizes of RBD models, ranging from 1.5B to 14B, and observe consistent performance improvements across all scales. Experimental results on 4 bias types--verbosity, position, bandwagon, and sentiment--evaluated using 8 LLM evaluators demonstrate RBD's strong effectiveness. For example, the RBD-8B model improves evaluation accuracy by an average of 18.5% and consistency by 10.9%, and surpasses prompting-based baselines and fine-tuned judges by 12.8% and 17.2%, respectively. These results highlight RBD's effectiveness and scalability. Additional experiments further demonstrate its strong generalization across biases and domains, as well as its efficiency.
Dynamic Noise Preference Optimization for LLM Self-Improvement via Synthetic Data
Feb 08, 2025



Although LLMs have achieved significant success, their reliance on large volumes of human-annotated data has limited their potential for further scaling. In this situation, utilizing self-generated synthetic data has become crucial for fine-tuning LLMs without extensive human annotation. However, current methods often fail to ensure consistent improvements across iterations, with performance stagnating after only minimal updates. To overcome these challenges, we introduce Dynamic Noise Preference Optimization (DNPO). DNPO employs a dynamic sample labeling mechanism to construct preference pairs for training and introduces controlled, trainable noise into the preference optimization process. Our approach effectively prevents stagnation and enables continuous improvement. In experiments with Zephyr-7B, DNPO consistently outperforms existing methods, showing an average performance boost of 2.6% across multiple benchmarks. Additionally, DNPO shows a significant improvement in model-generated data quality, with a 29.4% win-loss rate gap compared to the baseline in GPT-4 evaluations. This highlights its effectiveness in enhancing model performance through iterative refinement.
ToMoE: Converting Dense Large Language Models to Mixture-of-Experts through Dynamic Structural Pruning
Jan 25, 2025Large Language Models (LLMs) have demonstrated remarkable abilities in tackling a wide range of complex tasks. However, their huge computational and memory costs raise significant challenges in deploying these models on resource-constrained devices or efficiently serving them. Prior approaches have attempted to alleviate these problems by permanently removing less important model structures, yet these methods often result in substantial performance degradation due to the permanent deletion of model parameters. In this work, we tried to mitigate this issue by reducing the number of active parameters without permanently removing them. Specifically, we introduce a differentiable dynamic pruning method that pushes dense models to maintain a fixed number of active parameters by converting their MLP layers into a Mixture of Experts (MoE) architecture. Our method, even without fine-tuning, consistently outperforms previous structural pruning techniques across diverse model families, including Phi-2, LLaMA-2, LLaMA-3, and Qwen-2.5.