 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDreamMask: Boosting Open-vocabulary Panoptic Segmentation with Synthetic Data
Jan 03, 2025Open-vocabulary panoptic segmentation has received significant attention due to its applicability in the real world. Despite claims of robust generalization, we find that the advancements of previous works are attributed mainly on trained categories, exposing a lack of generalization to novel classes. In this paper, we explore boosting existing models from a data-centric perspective. We propose DreamMask, which systematically explores how to generate training data in the open-vocabulary setting, and how to train the model with both real and synthetic data. For the first part, we propose an automatic data generation pipeline with off-the-shelf models. We propose crucial designs for vocabulary expansion, layout arrangement, data filtering, etc. Equipped with these techniques, our generated data could significantly outperform the manually collected web data. To train the model with generated data, a synthetic-real alignment loss is designed to bridge the representation gap, bringing noticeable improvements across multiple benchmarks. In general, DreamMask significantly simplifies the collection of large-scale training data, serving as a plug-and-play enhancement for existing methods. For instance, when trained on COCO and tested on ADE20K, the model equipped with DreamMask outperforms the previous state-of-the-art by a substantial margin of 2.1% mIoU.
Next Patch Prediction for Autoregressive Visual Generation
Dec 19, 2024Autoregressive models, built based on the Next Token Prediction (NTP) paradigm, show great potential in developing a unified framework that integrates both language and vision tasks. In this work, we rethink the NTP for autoregressive image generation and propose a novel Next Patch Prediction (NPP) paradigm. Our key idea is to group and aggregate image tokens into patch tokens containing high information density. With patch tokens as a shorter input sequence, the autoregressive model is trained to predict the next patch, thereby significantly reducing the computational cost. We further propose a multi-scale coarse-to-fine patch grouping strategy that exploits the natural hierarchical property of image data. Experiments on a diverse range of models (100M-1.4B parameters) demonstrate that the next patch prediction paradigm could reduce the training cost to around 0.6 times while improving image generation quality by up to 1.0 FID score on the ImageNet benchmark. We highlight that our method retains the original autoregressive model architecture without introducing additional trainable parameters or specifically designing a custom image tokenizer, thus ensuring flexibility and seamless adaptation to various autoregressive models for visual generation.
OP-LoRA: The Blessing of Dimensionality
Dec 13, 2024



Low-rank adapters enable fine-tuning of large models with only a small number of parameters, thus reducing storage costs and minimizing the risk of catastrophic forgetting. However, they often pose optimization challenges, with poor convergence. To overcome these challenges, we introduce an over-parameterized approach that accelerates training without increasing inference costs. This method reparameterizes low-rank adaptation by employing a separate MLP and learned embedding for each layer. The learned embedding is input to the MLP, which generates the adapter parameters. Such overparamaterization has been shown to implicitly function as an adaptive learning rate and momentum, accelerating optimization. At inference time, the MLP can be discarded, leaving behind a standard low-rank adapter. To study the effect of MLP overparameterization on a small yet difficult proxy task, we implement it for matrix factorization, and find it achieves faster convergence and lower final loss. Extending this approach to larger-scale tasks, we observe consistent performance gains across domains. We achieve improvements in vision-language tasks and especially notable increases in image generation, with CMMD scores improving by up to 15 points.
Video Decomposition Prior: A Methodology to Decompose Videos into Layers
Dec 09, 2024



In the evolving landscape of video enhancement and editing methodologies, a majority of deep learning techniques often rely on extensive datasets of observed input and ground truth sequence pairs for optimal performance. Such reliance often falters when acquiring data becomes challenging, especially in tasks like video dehazing and relighting, where replicating identical motions and camera angles in both corrupted and ground truth sequences is complicated. Moreover, these conventional methodologies perform best when the test distribution closely mirrors the training distribution. Recognizing these challenges, this paper introduces a novel video decomposition prior `VDP' framework which derives inspiration from professional video editing practices. Our methodology does not mandate task-specific external data corpus collection, instead pivots to utilizing the motion and appearance of the input video. VDP framework decomposes a video sequence into a set of multiple RGB layers and associated opacity levels. These set of layers are then manipulated individually to obtain the desired results. We addresses tasks such as video object segmentation, dehazing, and relighting. Moreover, we introduce a novel logarithmic video decomposition formulation for video relighting tasks, setting a new benchmark over the existing methodologies. We observe the property of relighting emerge as we optimize for our novel relighting decomposition formulation. We evaluate our approach on standard video datasets like DAVIS, REVIDE, & SDSD and show qualitative results on a diverse array of internet videos. Project Page - https://www.cs.umd.edu/~gauravsh/video_decomposition/index.html for video results.
VideoGen-of-Thought: A Collaborative Framework for Multi-Shot Video Generation
Dec 03, 2024Current video generation models excel at generating short clips but still struggle with creating multi-shot, movie-like videos. Existing models trained on large-scale data on the back of rich computational resources are unsurprisingly inadequate for maintaining a logical storyline and visual consistency across multiple shots of a cohesive script since they are often trained with a single-shot objective. To this end, we propose VideoGen-of-Thought (VGoT), a collaborative and training-free architecture designed specifically for multi-shot video generation. VGoT is designed with three goals in mind as follows. Multi-Shot Video Generation: We divide the video generation process into a structured, modular sequence, including (1) Script Generation, which translates a curt story into detailed prompts for each shot; (2) Keyframe Generation, responsible for creating visually consistent keyframes faithful to character portrayals; and (3) Shot-Level Video Generation, which transforms information from scripts and keyframes into shots; (4) Smoothing Mechanism that ensures a consistent multi-shot output. Reasonable Narrative Design: Inspired by cinematic scriptwriting, our prompt generation approach spans five key domains, ensuring logical consistency, character development, and narrative flow across the entire video. Cross-Shot Consistency: We ensure temporal and identity consistency by leveraging identity-preserving (IP) embeddings across shots, which are automatically created from the narrative. Additionally, we incorporate a cross-shot smoothing mechanism, which integrates a reset boundary that effectively combines latent features from adjacent shots, resulting in smooth transitions and maintaining visual coherence throughout the video. Our experiments demonstrate that VGoT surpasses existing video generation methods in producing high-quality, coherent, multi-shot videos.
OmniCreator: Self-Supervised Unified Generation with Universal Editing
Dec 03, 2024
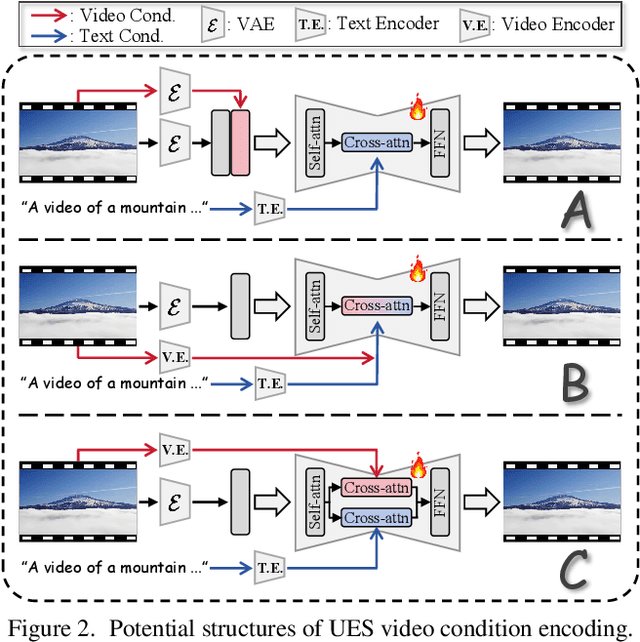

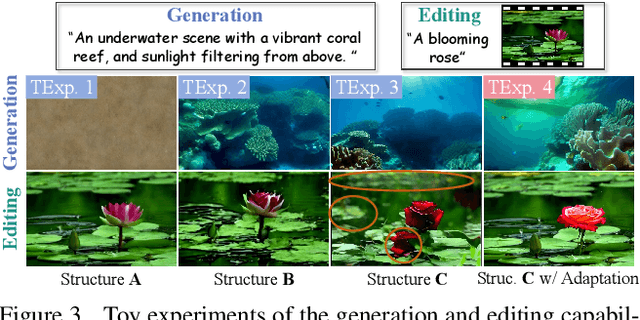
We introduce OmniCreator, a novel framework that can conduct text-prompted unified (image+video) generation as well as editing all in one place. OmniCreator acquires generative and universal editing capabilities in a self-supervised manner, taking original text-video pairs as conditions while utilizing the same video as a denoising target to learn the semantic correspondence between video and text. During inference, when presented with a text prompt and a video, OmniCreator is capable of generating a target that is faithful to both, achieving a universal editing effect that is unconstrained as opposed to existing editing work that primarily focuses on certain editing types or relies on additional controls (e.g., structural conditions, attention features, or DDIM inversion). On the other hand, when presented with a text prompt only, OmniCreator becomes generative, producing high-quality video as a result of the semantic correspondence learned. Importantly, we found that the same capabilities extend to images as is, making OmniCreator a truly unified framework. Further, due to the lack of existing generative video editing benchmarks, we introduce the OmniBench-99 dataset, designed to evaluate the performance of generative video editing models comprehensively. Extensive experiments demonstrate that OmniCreator exhibits substantial superiority over all other models.
DreamDance: Animating Human Images by Enriching 3D Geometry Cues from 2D Poses
Nov 30, 2024In this work, we present DreamDance, a novel method for animating human images using only skeleton pose sequences as conditional inputs. Existing approaches struggle with generating coherent, high-quality content in an efficient and user-friendly manner. Concretely, baseline methods relying on only 2D pose guidance lack the cues of 3D information, leading to suboptimal results, while methods using 3D representation as guidance achieve higher quality but involve a cumbersome and time-intensive process. To address these limitations, DreamDance enriches 3D geometry cues from 2D poses by introducing an efficient diffusion model, enabling high-quality human image animation with various guidance. Our key insight is that human images naturally exhibit multiple levels of correlation, progressing from coarse skeleton poses to fine-grained geometry cues, and further from these geometry cues to explicit appearance details. Capturing such correlations could enrich the guidance signals, facilitating intra-frame coherency and inter-frame consistency. Specifically, we construct the TikTok-Dance5K dataset, comprising 5K high-quality dance videos with detailed frame annotations, including human pose, depth, and normal maps. Next, we introduce a Mutually Aligned Geometry Diffusion Model to generate fine-grained depth and normal maps for enriched guidance. Finally, a Cross-domain Controller incorporates multi-level guidance to animate human images effectively with a video diffusion model. Extensive experiments demonstrate that our method achieves state-of-the-art performance in animating human images.
DLaVA: Document Language and Vision Assistant for Answer Localization with Enhanced Interpretability and Trustworthiness
Nov 29, 2024Document Visual Question Answering (VQA) requires models to interpret textual information within complex visual layouts and comprehend spatial relationships to answer questions based on document images. Existing approaches often lack interpretability and fail to precisely localize answers within the document, hindering users' ability to verify responses and understand the reasoning process. Moreover, standard metrics like Average Normalized Levenshtein Similarity (ANLS) focus on text accuracy but overlook spatial correctness. We introduce DLaVA, a novel method that enhances Multimodal Large Language Models (MLLMs) with answer localization capabilities for Document VQA. Our approach integrates image annotation directly into the MLLM pipeline, improving interpretability by enabling users to trace the model's reasoning. We present both OCR-dependent and OCR-free architectures, with the OCR-free approach eliminating the need for separate text recognition components, thus reducing complexity. To the best of our knowledge, DLaVA is the first approach to introduce answer localization within multimodal QA, marking a significant step forward in enhancing user trust and reducing the risk of AI hallucinations. Our contributions include enhancing interpretability and reliability by grounding responses in spatially annotated visual content, introducing answer localization in MLLMs, proposing a streamlined pipeline that combines an MLLM with a text detection module, and conducting comprehensive evaluations using both textual and spatial accuracy metrics, including Intersection over Union (IoU). Experimental results on standard datasets demonstrate that DLaVA achieves SOTA performance, significantly enhancing model transparency and reliability. Our approach sets a new benchmark for Document VQA, highlighting the critical importance of precise answer localization and model interpretability.
Towards Chunk-Wise Generation for Long Videos
Nov 27, 2024Generating long-duration videos has always been a significant challenge due to the inherent complexity of spatio-temporal domain and the substantial GPU memory demands required to calculate huge size tensors. While diffusion based generative models achieve state-of-the-art performance in video generation task, they are typically trained with predefined video resolutions and lengths. During inference, a noise tensor with specific resolution and length should be specified at first, and the model will perform denoising on the entire video tensor simultaneously, all the frames together. Such approach will easily raise an out-of-memory (OOM) problem when the specified resolution and/or length exceed a certain limit. One of the solutions to this problem is to generate many short video chunks autoregressively with strong inter-chunk spatio-temporal relation and then concatenate them together to form a long video. In this approach, a long video generation task is divided into multiple short video generation subtasks, and the cost of each subtask is reduced to a feasible level. In this paper, we conduct a detailed survey on long video generation with the autoregressive chunk-by-chunk strategy. We address common problems caused by applying short image-to-video models to long video tasks and design an efficient $k$-step search solution to mitigate these problems.
Scene Co-pilot: Procedural Text to Video Generation with Human in the Loop
Nov 26, 2024Video generation has achieved impressive quality, but it still suffers from artifacts such as temporal inconsistency and violation of physical laws. Leveraging 3D scenes can fundamentally resolve these issues by providing precise control over scene entities. To facilitate the easy generation of diverse photorealistic scenes, we propose Scene Copilot, a framework combining large language models (LLMs) with a procedural 3D scene generator. Specifically, Scene Copilot consists of Scene Codex, BlenderGPT, and Human in the loop. Scene Codex is designed to translate textual user input into commands understandable by the 3D scene generator. BlenderGPT provides users with an intuitive and direct way to precisely control the generated 3D scene and the final output video. Furthermore, users can utilize Blender UI to receive instant visual feedback. Additionally, we have curated a procedural dataset of objects in code format to further enhance our system's capabilities. Each component works seamlessly together to support users in generating desired 3D scenes. Extensive experiments demonstrate the capability of our framework in customizing 3D scenes and video generation.