 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMastering the Game of Stratego with Model-Free Multiagent Reinforcement Learning
Jun 30, 2022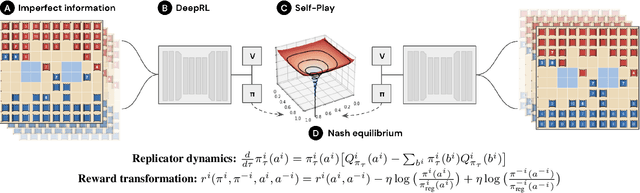
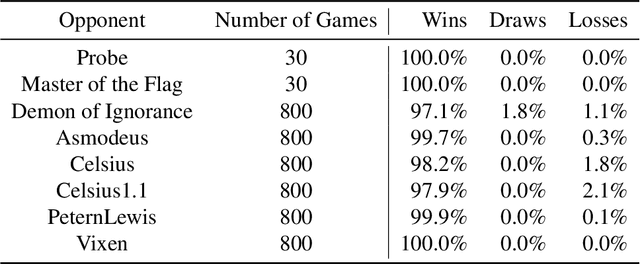
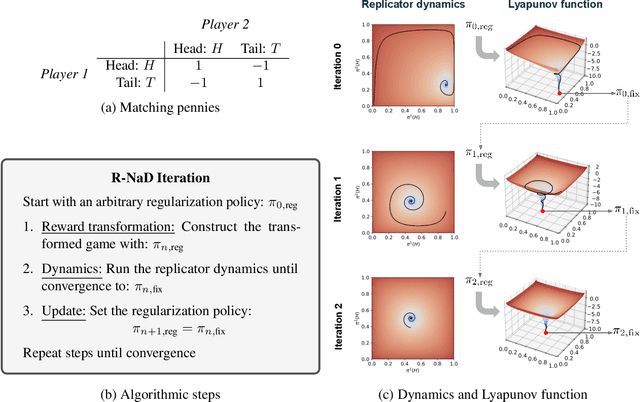
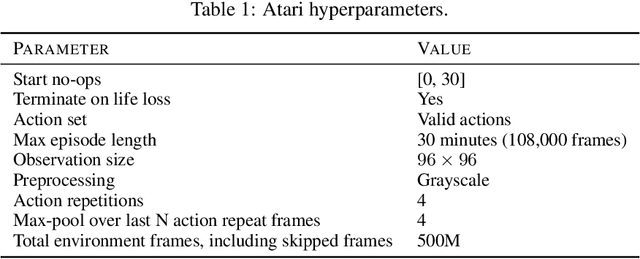
We introduce DeepNash, an autonomous agent capable of learning to play the imperfect information game Stratego from scratch, up to a human expert level. Stratego is one of the few iconic board games that Artificial Intelligence (AI) has not yet mastered. This popular game has an enormous game tree on the order of $10^{535}$ nodes, i.e., $10^{175}$ times larger than that of Go. It has the additional complexity of requiring decision-making under imperfect information, similar to Texas hold'em poker, which has a significantly smaller game tree (on the order of $10^{164}$ nodes). Decisions in Stratego are made over a large number of discrete actions with no obvious link between action and outcome. Episodes are long, with often hundreds of moves before a player wins, and situations in Stratego can not easily be broken down into manageably-sized sub-problems as in poker. For these reasons, Stratego has been a grand challenge for the field of AI for decades, and existing AI methods barely reach an amateur level of play. DeepNash uses a game-theoretic, model-free deep reinforcement learning method, without search, that learns to master Stratego via self-play. The Regularised Nash Dynamics (R-NaD) algorithm, a key component of DeepNash, converges to an approximate Nash equilibrium, instead of 'cycling' around it, by directly modifying the underlying multi-agent learning dynamics. DeepNash beats existing state-of-the-art AI methods in Stratego and achieved a yearly (2022) and all-time top-3 rank on the Gravon games platform, competing with human expert players.
Discovering Policies with DOMiNO: Diversity Optimization Maintaining Near Optimality
May 26, 2022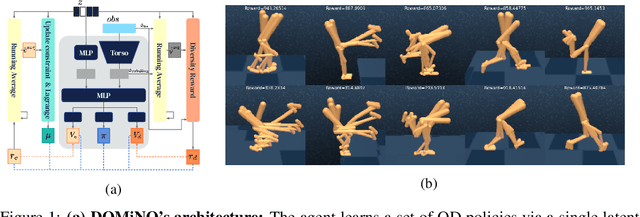
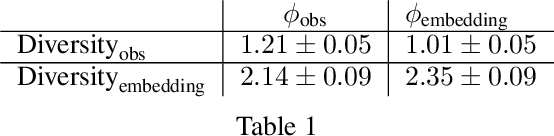
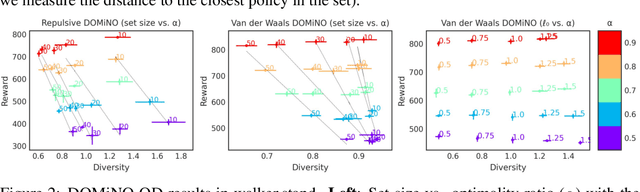
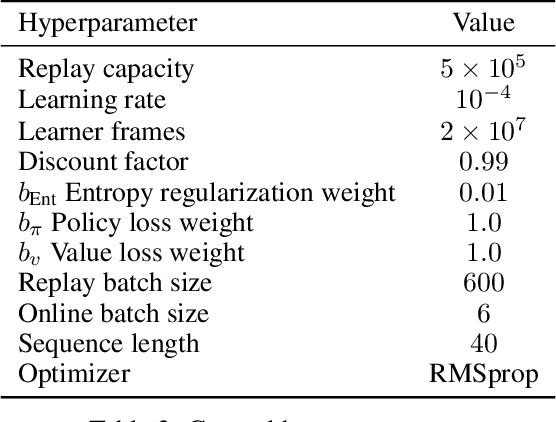
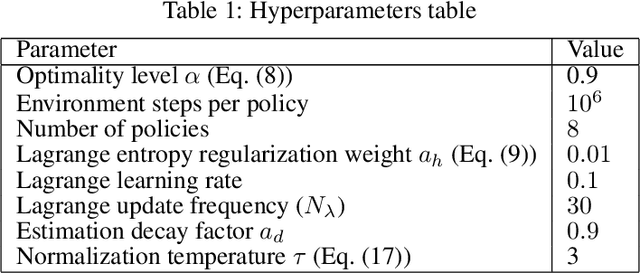
Finding different solutions to the same problem is a key aspect of intelligence associated with creativity and adaptation to novel situations. In reinforcement learning, a set of diverse policies can be useful for exploration, transfer, hierarchy, and robustness. We propose DOMiNO, a method for Diversity Optimization Maintaining Near Optimality. We formalize the problem as a Constrained Markov Decision Process where the objective is to find diverse policies, measured by the distance between the state occupancies of the policies in the set, while remaining near-optimal with respect to the extrinsic reward. We demonstrate that the method can discover diverse and meaningful behaviors in various domains, such as different locomotion patterns in the DeepMind Control Suite. We perform extensive analysis of our approach, compare it with other multi-objective baselines, demonstrate that we can control both the quality and the diversity of the set via interpretable hyperparameters, and show that the discovered set is robust to perturbations.
GrASP: Gradient-Based Affordance Selection for Planning
Feb 08, 2022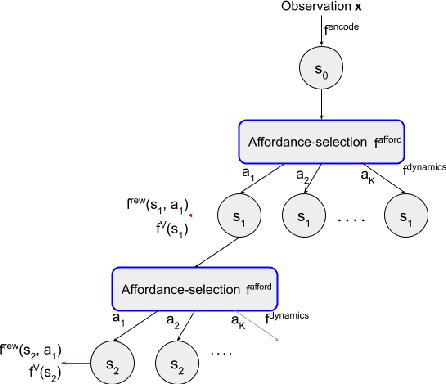
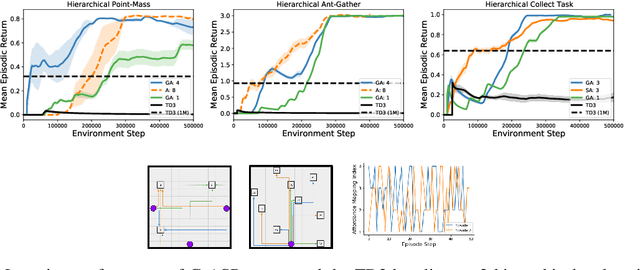
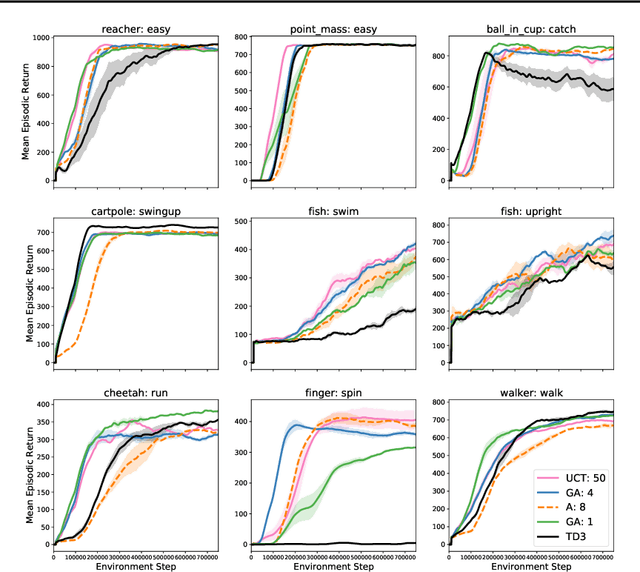
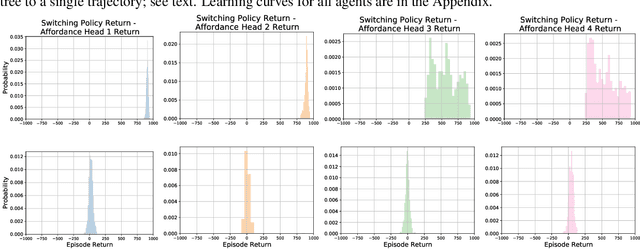
Planning with a learned model is arguably a key component of intelligence. There are several challenges in realizing such a component in large-scale reinforcement learning (RL) problems. One such challenge is dealing effectively with continuous action spaces when using tree-search planning (e.g., it is not feasible to consider every action even at just the root node of the tree). In this paper we present a method for selecting affordances useful for planning -- for learning which small number of actions/options from a continuous space of actions/options to consider in the tree-expansion process during planning. We consider affordances that are goal-and-state-conditional mappings to actions/options as well as unconditional affordances that simply select actions/options available in all states. Our selection method is gradient based: we compute gradients through the planning procedure to update the parameters of the function that represents affordances. Our empirical work shows that it is feasible to learn to select both primitive-action and option affordances, and that simultaneously learning to select affordances and planning with a learned value-equivalent model can outperform model-free RL.
On the Expressivity of Markov Reward
Nov 01, 2021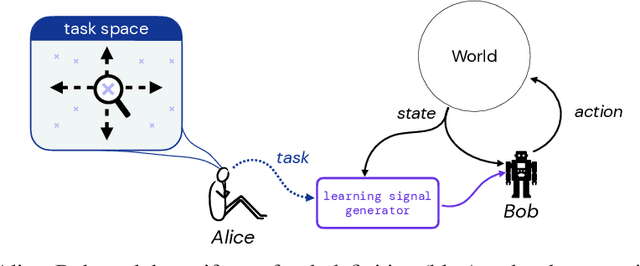
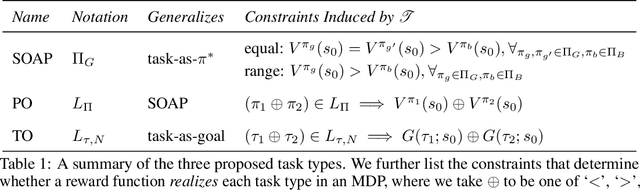

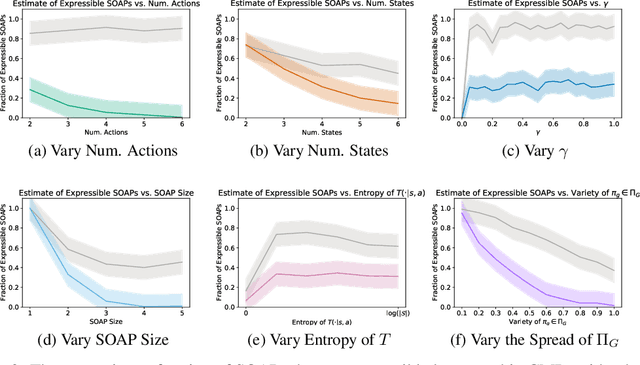
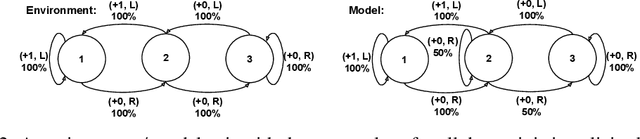
Reward is the driving force for reinforcement-learning agents. This paper is dedicated to understanding the expressivity of reward as a way to capture tasks that we would want an agent to perform. We frame this study around three new abstract notions of "task" that might be desirable: (1) a set of acceptable behaviors, (2) a partial ordering over behaviors, or (3) a partial ordering over trajectories. Our main results prove that while reward can express many of these tasks, there exist instances of each task type that no Markov reward function can capture. We then provide a set of polynomial-time algorithms that construct a Markov reward function that allows an agent to optimize tasks of each of these three types, and correctly determine when no such reward function exists. We conclude with an empirical study that corroborates and illustrates our theoretical findings.
Learning to Learn End-to-End Goal-Oriented Dialog From Related Dialog Tasks
Oct 10, 2021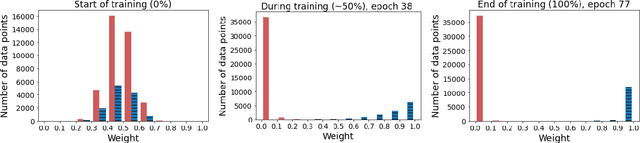
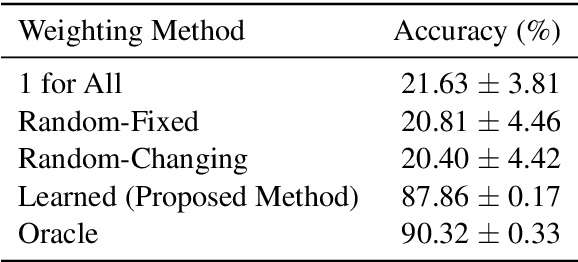
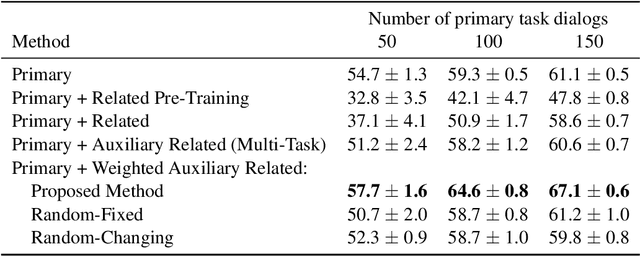
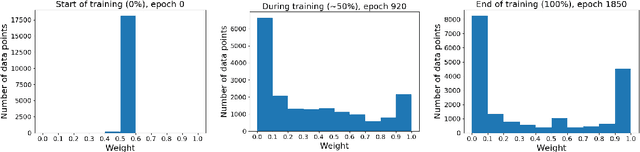
For each goal-oriented dialog task of interest, large amounts of data need to be collected for end-to-end learning of a neural dialog system. Collecting that data is a costly and time-consuming process. Instead, we show that we can use only a small amount of data, supplemented with data from a related dialog task. Naively learning from related data fails to improve performance as the related data can be inconsistent with the target task. We describe a meta-learning based method that selectively learns from the related dialog task data. Our approach leads to significant accuracy improvements in an example dialog task.
Bootstrapped Meta-Learning
Sep 09, 2021

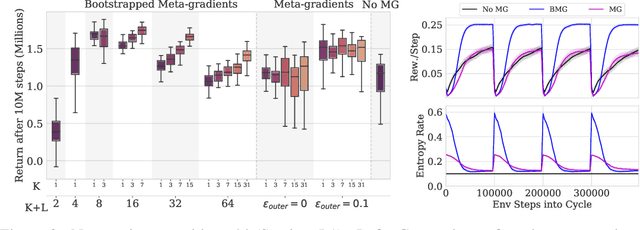
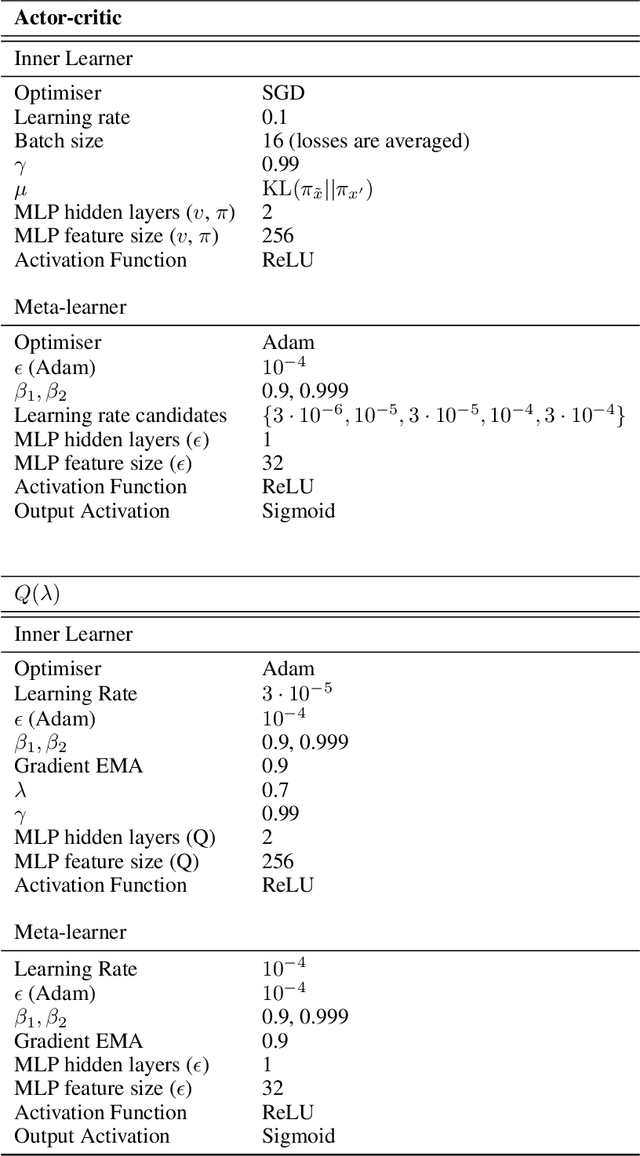
Meta-learning empowers artificial intelligence to increase its efficiency by learning how to learn. Unlocking this potential involves overcoming a challenging meta-optimisation problem that often exhibits ill-conditioning, and myopic meta-objectives. We propose an algorithm that tackles these issues by letting the meta-learner teach itself. The algorithm first bootstraps a target from the meta-learner, then optimises the meta-learner by minimising the distance to that target under a chosen (pseudo-)metric. Focusing on meta-learning with gradients, we establish conditions that guarantee performance improvements and show that the improvement is related to the target distance. Thus, by controlling curvature, the distance measure can be used to ease meta-optimization, for instance by reducing ill-conditioning. Further, the bootstrapping mechanism can extend the effective meta-learning horizon without requiring backpropagation through all updates. The algorithm is versatile and easy to implement. We achieve a new state-of-the art for model-free agents on the Atari ALE benchmark, improve upon MAML in few-shot learning, and demonstrate how our approach opens up new possibilities by meta-learning efficient exploration in a Q-learning agent.
Proper Value Equivalence
Jun 18, 2021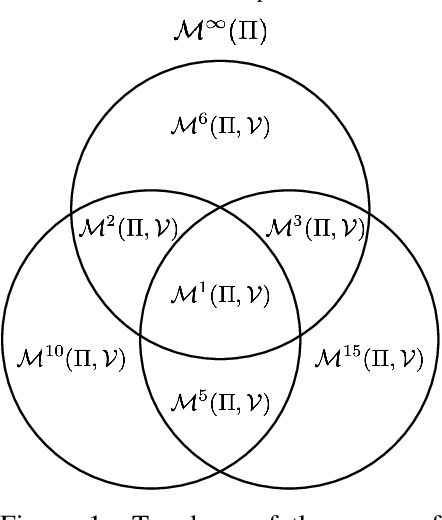
One of the main challenges in model-based reinforcement learning (RL) is to decide which aspects of the environment should be modeled. The value-equivalence (VE) principle proposes a simple answer to this question: a model should capture the aspects of the environment that are relevant for value-based planning. Technically, VE distinguishes models based on a set of policies and a set of functions: a model is said to be VE to the environment if the Bellman operators it induces for the policies yield the correct result when applied to the functions. As the number of policies and functions increase, the set of VE models shrinks, eventually collapsing to a single point corresponding to a perfect model. A fundamental question underlying the VE principle is thus how to select the smallest sets of policies and functions that are sufficient for planning. In this paper we take an important step towards answering this question. We start by generalizing the concept of VE to order-$k$ counterparts defined with respect to $k$ applications of the Bellman operator. This leads to a family of VE classes that increase in size as $k \rightarrow \infty$. In the limit, all functions become value functions, and we have a special instantiation of VE which we call proper VE or simply PVE. Unlike VE, the PVE class may contain multiple models even in the limit when all value functions are used. Crucially, all these models are sufficient for planning, meaning that they will yield an optimal policy despite the fact that they may ignore many aspects of the environment. We construct a loss function for learning PVE models and argue that popular algorithms such as MuZero and Muesli can be understood as minimizing an upper bound for this loss. We leverage this connection to propose a modification to MuZero and show that it can lead to improved performance in practice.
Discovering Diverse Nearly Optimal Policies withSuccessor Features
Jun 01, 2021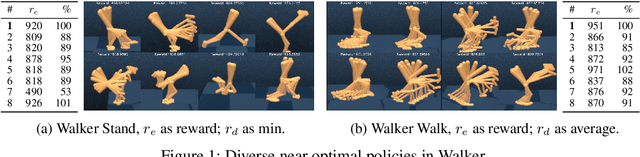
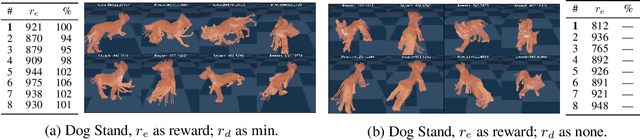
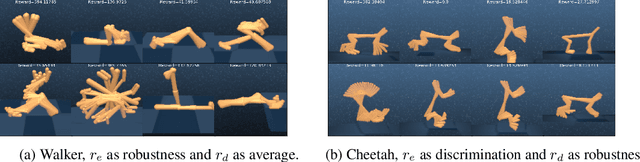
Finding different solutions to the same problem is a key aspect of intelligence associated with creativity and adaptation to novel situations. In reinforcement learning, a set of diverse policies can be useful for exploration, transfer, hierarchy, and robustness. We propose Diverse Successive Policies, a method for discovering policies that are diverse in the space of Successor Features, while assuring that they are near optimal. We formalize the problem as a Constrained Markov Decision Process (CMDP) where the goal is to find policies that maximize diversity, characterized by an intrinsic diversity reward, while remaining near-optimal with respect to the extrinsic reward of the MDP. We also analyze how recently proposed robustness and discrimination rewards perform and find that they are sensitive to the initialization of the procedure and may converge to sub-optimal solutions. To alleviate this, we propose new explicit diversity rewards that aim to minimize the correlation between the Successor Features of the policies in the set. We compare the different diversity mechanisms in the DeepMind Control Suite and find that the type of explicit diversity we are proposing is important to discover distinct behavior, like for example different locomotion patterns.
Reward is enough for convex MDPs
Jun 01, 2021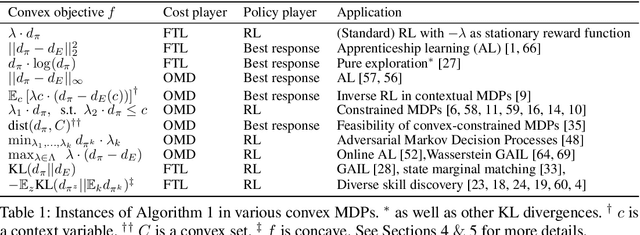
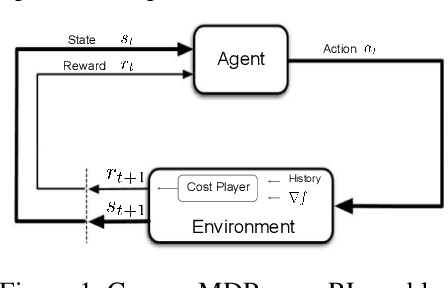
Maximising a cumulative reward function that is Markov and stationary, i.e., defined over state-action pairs and independent of time, is sufficient to capture many kinds of goals in a Markov Decision Process (MDP) based on the Reinforcement Learning (RL) problem formulation. However, not all goals can be captured in this manner. Specifically, it is easy to see that Convex MDPs in which goals are expressed as convex functions of stationary distributions cannot, in general, be formulated in this manner. In this paper, we reformulate the convex MDP problem as a min-max game between the policy and cost (negative reward) players using Fenchel duality and propose a meta-algorithm for solving it. We show that the average of the policies produced by an RL agent that maximizes the non-stationary reward produced by the cost player converges to an optimal solution to the convex MDP. Finally, we show that the meta-algorithm unifies several disparate branches of reinforcement learning algorithms in the literature, such as apprenticeship learning, variational intrinsic control, constrained MDPs, and pure exploration into a single framework.
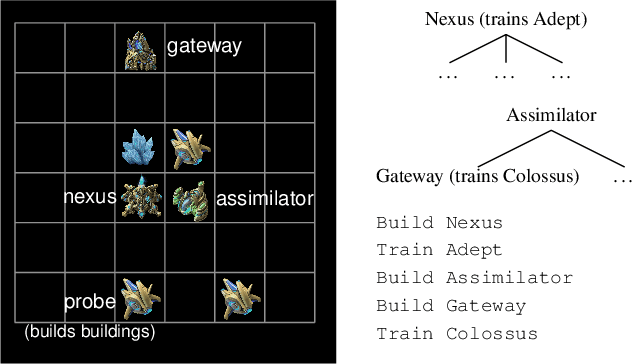
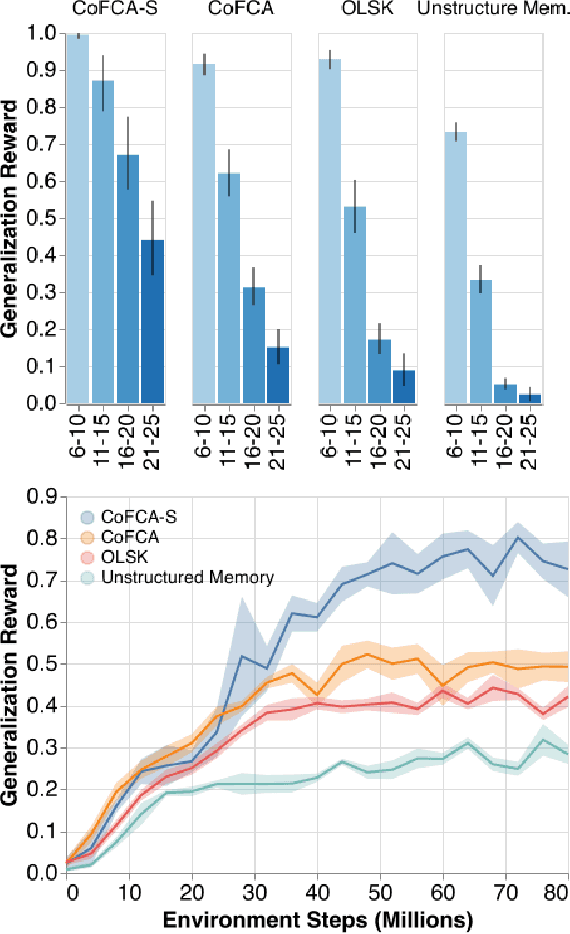
Reinforcement Learning of Implicit and Explicit Control Flow in Instructions
Feb 25, 2021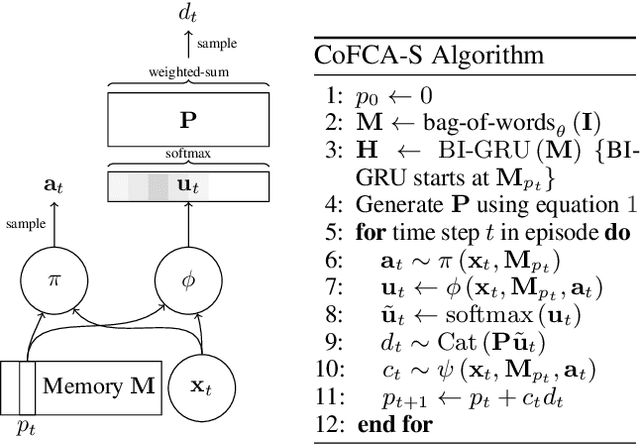

Learning to flexibly follow task instructions in dynamic environments poses interesting challenges for reinforcement learning agents. We focus here on the problem of learning control flow that deviates from a strict step-by-step execution of instructions -- that is, control flow that may skip forward over parts of the instructions or return backward to previously completed or skipped steps. Demand for such flexible control arises in two fundamental ways: explicitly when control is specified in the instructions themselves (such as conditional branching and looping) and implicitly when stochastic environment dynamics require re-completion of instructions whose effects have been perturbed, or opportunistic skipping of instructions whose effects are already present. We formulate an attention-based architecture that meets these challenges by learning, from task reward only, to flexibly attend to and condition behavior on an internal encoding of the instructions. We test the architecture's ability to learn both explicit and implicit control in two illustrative domains -- one inspired by Minecraft and the other by StarCraft -- and show that the architecture exhibits zero-shot generalization to novel instructions of length greater than those in a training set, at a performance level unmatched by two baseline recurrent architectures and one ablation architecture.