 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMARCH: Model-Assisted Reinforcement Learning for the Perceptive Control of Humanoids over Sparse Footholds
Jun 09, 2026Perceptive bipedal locomotion over sparse terrain remains a difficult challenge: model-based methods are precise but brittle to uncertainty, while model-free methods are robust but struggle to discover the precise, constrained motions required for safety-critical locomotion where small errors can cause catastrophic failures. We propose a model-assisted reinforcement learning (RL) framework that combines both perspectives in three steps: (1) generate a safe reference trajectory using simplified models; (2) train a privileged teacher policy guided by a control Lyapunov function (CLF) reward built around the safe reference trajectory; and (3) distill the teacher into a vision-based student policy. We show that this model-assistance procedure produces physically grounded locomotion, improving sample efficiency, reducing the need for a complex learning curriculum, and achieving smoother locomotion behavior alongside stepping stone performance comparable to model-free baselines. We validate our approach in simulation and demonstrate successful deployment on a Unitree G1 humanoid robot navigating sparse footholds with lateral constraints.
Safe-SAGE: Social-Semantic Adaptive Guidance for Safe Engagement through Laplace-Modulated Poisson Safety Functions
Mar 05, 2026Traditional safety-critical control methods, such as control barrier functions, suffer from semantic blindness, exhibiting the same behavior around obstacles regardless of contextual significance. This limitation leads to the uniform treatment of all obstacles, despite their differing semantic meanings. We present Safe-SAGE (Social-Semantic Adaptive Guidance for Safe Engagement), a unified framework that bridges the gap between high-level semantic understanding and low-level safety-critical control through a Poisson safety function (PSF) modulated using a Laplace guidance field. Our approach perceives the environment by fusing multi-sensor point clouds with vision-based instance segmentation and persistent object tracking to maintain up-to-date semantics beyond the camera's field of view. A multi-layer safety filter is then used to modulate system inputs to achieve safe navigation using this semantic understanding of the environment. This safety filter consists of both a model predictive control layer and a control barrier function layer. Both layers utilize the PSF and flux modulation of the guidance field to introduce varying levels of conservatism and multi-agent passing norms for different obstacles in the environment. Our framework enables legged robots to navigate semantically rich, dynamic environments with context-dependent safety margins while maintaining rigorous safety guarantees.
Risk-Aware Safety Filters with Poisson Safety Functions and Laplace Guidance Fields
Oct 29, 2025Robotic systems navigating in real-world settings require a semantic understanding of their environment to properly determine safe actions. This work aims to develop the mathematical underpinnings of such a representation -- specifically, the goal is to develop safety filters that are risk-aware. To this end, we take a two step approach: encoding an understanding of the environment via Poisson's equation, and associated risk via Laplace guidance fields. That is, we first solve a Dirichlet problem for Poisson's equation to generate a safety function that encodes system safety as its 0-superlevel set. We then separately solve a Dirichlet problem for Laplace's equation to synthesize a safe \textit{guidance field} that encodes variable levels of caution around obstacles -- by enforcing a tunable flux boundary condition. The safety function and guidance fields are then combined to define a safety constraint and used to synthesize a risk-aware safety filter which, given a semantic understanding of an environment with associated risk levels of environmental features, guarantees safety while prioritizing avoidance of higher risk obstacles. We demonstrate this method in simulation and discuss how \textit{a priori} understandings of obstacle risk can be directly incorporated into the safety filter to generate safe behaviors that are risk-aware.
SHIELD: Safety on Humanoids via CBFs In Expectation on Learned Dynamics
May 16, 2025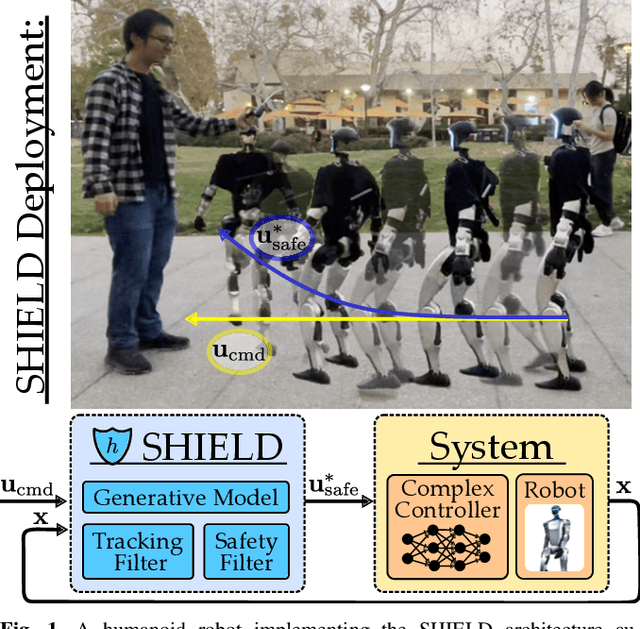
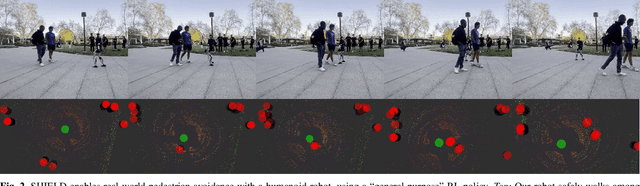
Robot learning has produced remarkably effective ``black-box'' controllers for complex tasks such as dynamic locomotion on humanoids. Yet ensuring dynamic safety, i.e., constraint satisfaction, remains challenging for such policies. Reinforcement learning (RL) embeds constraints heuristically through reward engineering, and adding or modifying constraints requires retraining. Model-based approaches, like control barrier functions (CBFs), enable runtime constraint specification with formal guarantees but require accurate dynamics models. This paper presents SHIELD, a layered safety framework that bridges this gap by: (1) training a generative, stochastic dynamics residual model using real-world data from hardware rollouts of the nominal controller, capturing system behavior and uncertainties; and (2) adding a safety layer on top of the nominal (learned locomotion) controller that leverages this model via a stochastic discrete-time CBF formulation enforcing safety constraints in probability. The result is a minimally-invasive safety layer that can be added to the existing autonomy stack to give probabilistic guarantees of safety that balance risk and performance. In hardware experiments on an Unitree G1 humanoid, SHIELD enables safe navigation (obstacle avoidance) through varied indoor and outdoor environments using a nominal (unknown) RL controller and onboard perception.
Constructive Safety-Critical Control: Synthesizing Control Barrier Functions for Partially Feedback Linearizable Systems
Jun 04, 2024Certifying the safety of nonlinear systems, through the lens of set invariance and control barrier functions (CBFs), offers a powerful method for controller synthesis, provided a CBF can be constructed. This paper draws connections between partial feedback linearization and CBF synthesis. We illustrate that when a control affine system is input-output linearizable with respect to a smooth output function, then, under mild regularity conditions, one may extend any safety constraint defined on the output to a CBF for the full-order dynamics. These more general results are specialized to robotic systems where the conditions required to synthesize CBFs simplify. The CBFs constructed from our approach are applied and verified in simulation and hardware experiments on a quadrotor.
A Constructive Method for Designing Safe Multirate Controllers for Differentially-Flat Systems
Mar 26, 2024We present a multi-rate control architecture that leverages fundamental properties of differential flatness to synthesize controllers for safety-critical nonlinear dynamical systems. We propose a two-layer architecture, where the high-level generates reference trajectories using a linear Model Predictive Controller, and the low-level tracks this reference using a feedback controller. The novelty lies in how we couple these layers, to achieve formal guarantees on recursive feasibility of the MPC problem, and safety of the nonlinear system. Furthermore, using differential flatness, we provide a constructive means to synthesize the multi-rate controller, thereby removing the need to search for suitable Lyapunov or barrier functions, or to approximately linearize/discretize nonlinear dynamics. We show the synthesized controller is a convex optimization problem, making it amenable to real-time implementations. The method is demonstrated experimentally on a ground rover and a quadruped robotic system.
* 6 pages, 3 figures, accepted at IEEE Control Systems Letters 2021
Input-to-State Stability in Probability
Apr 28, 2023Input-to-State Stability (ISS) is fundamental in mathematically quantifying how stability degrades in the presence of bounded disturbances. If a system is ISS, its trajectories will remain bounded, and will converge to a neighborhood of an equilibrium of the undisturbed system. This graceful degradation of stability in the presence of disturbances describes a variety of real-world control implementations. Despite its utility, this property requires the disturbance to be bounded and provides invariance and stability guarantees only with respect to this worst-case bound. In this work, we introduce the concept of ``ISS in probability (ISSp)'' which generalizes ISS to discrete-time systems subject to unbounded stochastic disturbances. Using tools from martingale theory, we provide Lyapunov conditions for a system to be exponentially ISSp, and connect ISSp to stochastic stability conditions found in literature. We exemplify the utility of this method through its application to a bipedal robot confronted with step heights sampled from a truncated Gaussian distribution.
Learning Responsibility Allocations for Safe Human-Robot Interaction with Applications to Autonomous Driving
Mar 06, 2023



Drivers have a responsibility to exercise reasonable care to avoid collision with other road users. This assumed responsibility allows interacting agents to maintain safety without explicit coordination. Thus to enable safe autonomous vehicle (AV) interactions, AVs must understand what their responsibilities are to maintain safety and how they affect the safety of nearby agents. In this work we seek to understand how responsibility is shared in multi-agent settings where an autonomous agent is interacting with human counterparts. We introduce Responsibility-Aware Control Barrier Functions (RA-CBFs) and present a method to learn responsibility allocations from data. By combining safety-critical control and learning-based techniques, RA-CBFs allow us to account for scene-dependent responsibility allocations and synthesize safe and efficient driving behaviors without making worst-case assumptions that typically result in overly-conservative behaviors. We test our framework using real-world driving data and demonstrate its efficacy as a tool for both safe control and forensic analysis of unsafe driving.
Safety of Sampled-Data Systems with Control Barrier Functions via Approximate Discrete Time Models
Mar 22, 2022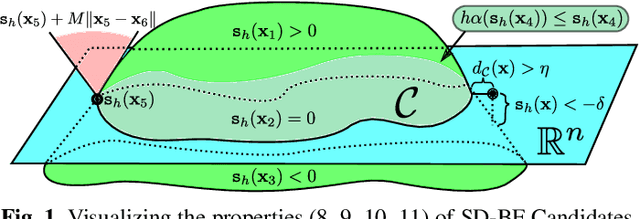
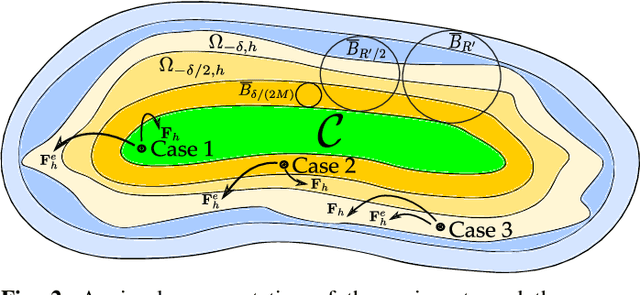
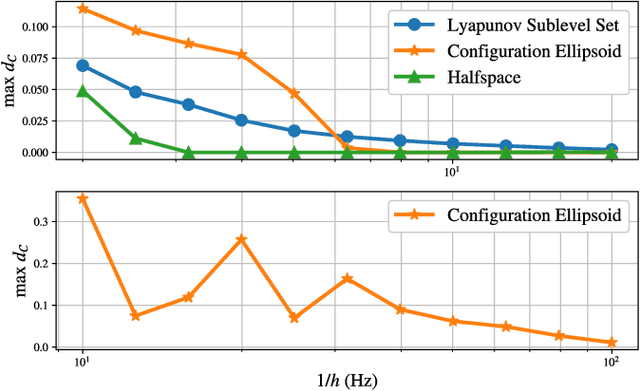

Control Barrier Functions (CBFs) have been demonstrated to be a powerful tool for safety-critical controller design for nonlinear systems. Existing design paradigms do not address the gap between theory (controller design with continuous time models) and practice (the discrete time sampled implementation of the resulting controllers); this can lead to poor performance and violations of safety for hardware instantiations. We propose an approach to close this gap by synthesizing sampled-data counterparts to these CBF-based controllers using approximate discrete time models and Sampled-Data Control Barrier Functions (SD-CBFs). Using properties of a system's continuous time model, we establish a relationship between SD-CBFs and a notion of practical safety for sampled-data systems. Furthermore, we construct convex optimization-based controllers that formally endow nonlinear systems with safety guarantees in practice. We demonstrate the efficacy of these controllers in simulation.
Self-Supervised Online Learning for Safety-Critical Control using Stereo Vision
Mar 02, 2022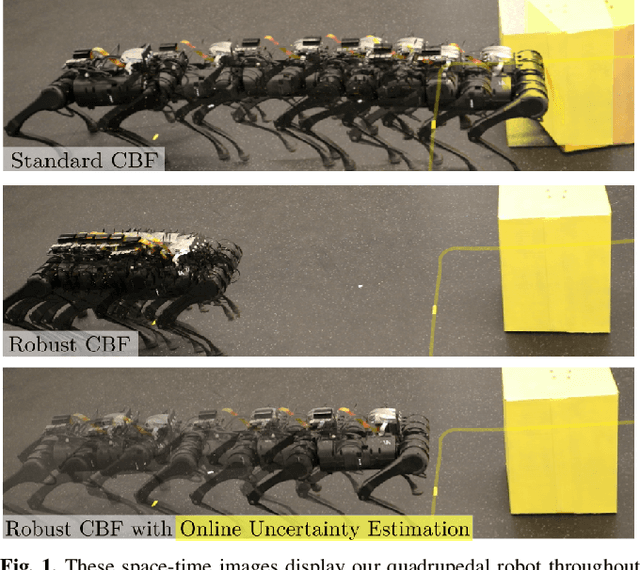
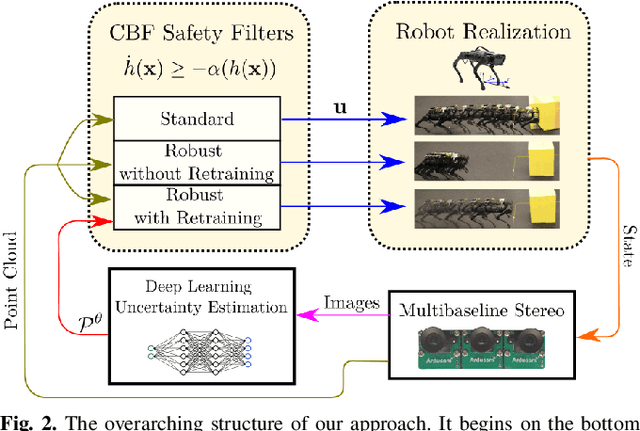
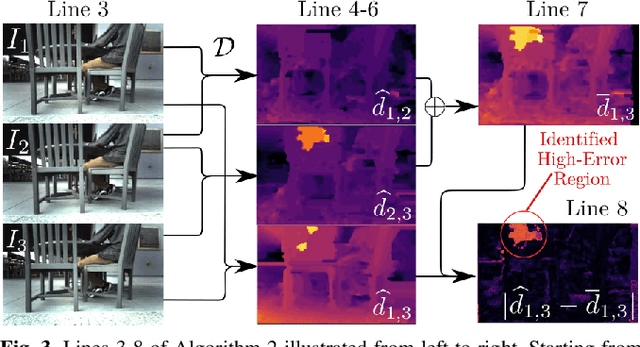
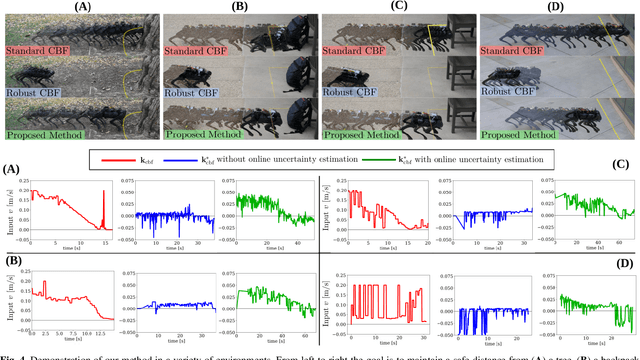
With the increasing prevalence of complex vision-based sensing methods for use in obstacle identification and state estimation, characterizing environment-dependent measurement errors has become a difficult and essential part of modern robotics. This paper presents a self-supervised learning approach to safety-critical control. In particular, the uncertainty associated with stereo vision is estimated, and adapted online to new visual environments, wherein this estimate is leveraged in a safety-critical controller in a robust fashion. To this end, we propose an algorithm that exploits the structure of stereo-vision to learn an uncertainty estimate without the need for ground-truth data. We then robustify existing Control Barrier Function-based controllers to provide safety in the presence of this uncertainty estimate. We demonstrate the efficacy of our method on a quadrupedal robot in a variety of environments. When not using our method safety is violated. With offline training alone we observe the robot is safe, but overly-conservative. With our online method the quadruped remains safe and conservatism is reduced.