 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSemantics-Guided Multimodal Masked Autoencoder Pretraining for 3D BEV Object Detection
May 24, 2026Accurate 3D bird's-eye view (BEV) object detection is essential for autonomous driving, and depends strongly on effective multimodal representations from complementary sensors such as cameras and LiDAR. Multimodal masked autoencoders have shown strong potential for learning such representations for downstream 3D BEV object detection. However, existing methods typically apply uniform random masking to camera and LiDAR inputs, treating all regions equally, and learn representations only through masked reconstruction. We propose a semantics-guided multimodal masked autoencoder framework that introduces semantic information during pretraining through two separate components: (i) semantics-guided LiDAR voxel masking, which preserves semantically important LiDAR regions more strongly, and (ii) an auxiliary point-wise LiDAR semantic decoder branch that injects semantic guidance in addition to reconstruction. On BEVFusion 3D object detection, our semantics-guided pretraining strategy improves performance on the nuScenes mini validation set compared to the standard UniM2AE baseline: semantics-guided LiDAR voxel masking yields +1.49% mean Average Precision (mAP) and +1.66% nuScenes Detection Score (NDS), while decoder-side point semantic supervision yields +1.39% mAP and +3.22% NDS over the baseline.
Calibration-Informative Region Selection for Online LiDAR--Camera Calibration in Agricultural Environments
May 22, 2026Reliable multi-modal calibration requires identifying which observations truly constrain the extrinsic parameters and which ones mainly add noise or ambiguity. In this paper, we propose a support-map-driven approach to multi-modal calibration that decouples four functional blocks: initial calibration, cross-modal residual extraction, support-map estimation, and support-aware refinement. We instantiate this formulation for online LiDAR--camera calibration using MDPCalib, a target-less LiDAR--camera calibration method based on motion and deep point correspondences, and CMRNext, a dense LiDAR--camera matching model that predicts optical-flow-like image-plane residuals. The key contribution is a dense calibration support map that aggregates cross-modal agreement over aligned observations and highlights where calibration evidence is consistently reliable. Across the Bacchus Long-Term (BLT) dataset and KITTI, we show that calibration evidence is spatially and semantically non-uniform, indicating that some semantic regions provide stronger cues for calibration than others. On KITTI, support-guided refinement improves the calibration performance with better translation accuracy while rotational gains remain limited.
Perception-Aware Autonomous Exploration in Feature-Limited Environments
Mar 16, 2026Autonomous exploration in unknown environments typically relies on onboard state estimation for localisation and mapping. Existing exploration methods primarily maximise coverage efficiency, but often overlook that visual-inertial odometry (VIO) performance strongly depends on the availability of robust visual features. As a result, exploration policies can drive a robot into feature-sparse regions where tracking degrades, leading to odometry drift, corrupted maps, and mission failure. We propose a hierarchical perception-aware exploration framework for a stereo-equipped unmanned aerial vehicle (UAV) that explicitly couples exploration progress with feature observability. Our approach (i) associates each candidate frontier with an expected feature quality using a global feature map, and prioritises visually informative subgoals, and (ii) optimises a continuous yaw trajectory along the planned motion to maintain stable feature tracks. We evaluate our method in simulation across environments with varying texture levels and in real-world indoor experiments with largely textureless walls. Compared to baselines that ignore feature quality and/or do not optimise continuous yaw, our method maintains more reliable feature tracking, reduces odometry drift, and achieves on average 30\% higher coverage before the odometry error exceeds specified thresholds.
Semantic Landmark Particle Filter for Robot Localisation in Vineyards
Mar 11, 2026Reliable localisation in vineyards is hindered by row-level perceptual aliasing: parallel crop rows produce nearly identical LiDAR observations, causing geometry-only and vision-based SLAM systems to converge towards incorrect corridors, particularly during headland transitions. We present a Semantic Landmark Particle Filter (SLPF) that integrates trunk and pole landmark detections with 2D LiDAR within a probabilistic localisation framework. Detected trunks are converted into semantic walls, forming structural row boundaries embedded in the measurement model to improve discrimination between adjacent rows. GNSS is incorporated as a lightweight prior that stabilises localisation when semantic observations are sparse. Field experiments in a 10-row vineyard demonstrate consistent improvements over geometry-only (AMCL), vision-based (RTAB-Map), and GNSS baselines. Compared to AMCL, SLPF reduces Absolute Pose Error by 22% and 65% across two traversal directions; relative to a NoisyGNSS baseline, APE decreases by 65% and 61%. Row correctness improves from 0.67 to 0.73, while mean cross-track error decreases from 1.40 m to 1.26 m. These results show that embedding row-level structural semantics within the measurement model enables robust localisation in highly repetitive outdoor agricultural environments.
Keypoint Semantic Integration for Improved Feature Matching in Outdoor Agricultural Environments
Mar 11, 2025Robust robot navigation in outdoor environments requires accurate perception systems capable of handling visual challenges such as repetitive structures and changing appearances. Visual feature matching is crucial to vision-based pipelines but remains particularly challenging in natural outdoor settings due to perceptual aliasing. We address this issue in vineyards, where repetitive vine trunks and other natural elements generate ambiguous descriptors that hinder reliable feature matching. We hypothesise that semantic information tied to keypoint positions can alleviate perceptual aliasing by enhancing keypoint descriptor distinctiveness. To this end, we introduce a keypoint semantic integration technique that improves the descriptors in semantically meaningful regions within the image, enabling more accurate differentiation even among visually similar local features. We validate this approach in two vineyard perception tasks: (i) relative pose estimation and (ii) visual localisation. Across all tested keypoint types and descriptors, our method improves matching accuracy by 12.6%, demonstrating its effectiveness over multiple months in challenging vineyard conditions.
SPARROW: Smart Precision Agriculture Robot for Ridding of Weeds
May 31, 2024The advancements in precision agriculture are vital to support the increasing demand for global food supply. Precision spot spraying is a major step towards reducing chemical usage for pest and weed control in agriculture. A novel spot spraying algorithm that autonomously detects weeds and performs trajectory planning for the sprayer nozzle has been proposed. Furthermore, this research introduces a vision-based autonomous navigation system that operates through the detected crop row, effectively synchronizing with an autonomous spraying algorithm. This proposed system is characterized by its cost effectiveness that enable the autonomous spraying of herbicides onto detected weeds.
Crop Row Switching for Vision-Based Navigation: A Comprehensive Approach for Efficient Crop Field Navigation
Sep 21, 2023



Vision-based mobile robot navigation systems in arable fields are mostly limited to in-row navigation. The process of switching from one crop row to the next in such systems is often aided by GNSS sensors or multiple camera setups. This paper presents a novel vision-based crop row-switching algorithm that enables a mobile robot to navigate an entire field of arable crops using a single front-mounted camera. The proposed row-switching manoeuvre uses deep learning-based RGB image segmentation and depth data to detect the end of the crop row, and re-entry point to the next crop row which would be used in a multi-state row switching pipeline. Each state of this pipeline use visual feedback or wheel odometry of the robot to successfully navigate towards the next crop row. The proposed crop row navigation pipeline was tested in a real sugar beet field containing crop rows with discontinuities, varying light levels, shadows and irregular headland surfaces. The robot could successfully exit from one crop row and re-enter the next crop row using the proposed pipeline with absolute median errors averaging at 19.25 cm and 6.77{\deg} for linear and rotational steps of the proposed manoeuvre.
Leaving the Lines Behind: Vision-Based Crop Row Exit for Agricultural Robot Navigation
Jun 09, 2023Usage of purely vision based solutions for row switching is not well explored in existing vision based crop row navigation frameworks. This method only uses RGB images for local feature matching based visual feedback to exit crop row. Depth images were used at crop row end to estimate the navigation distance within headland. The algorithm was tested on diverse headland areas with soil and vegetation. The proposed method could reach the end of the crop row and then navigate into the headland completely leaving behind the crop row with an error margin of 50 cm.
Vision based Crop Row Navigation under Varying Field Conditions in Arable Fields
Sep 28, 2022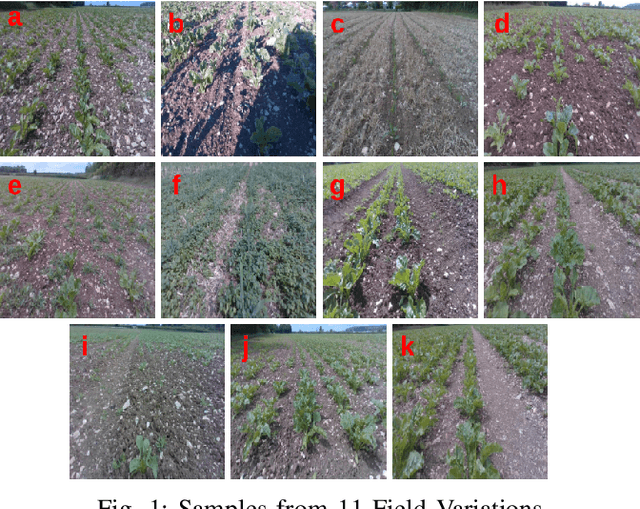

Accurate crop row detection is often challenged by the varying field conditions present in real-world arable fields. Traditional colour based segmentation is unable to cater for all such variations. The lack of comprehensive datasets in agricultural environments limits the researchers from developing robust segmentation models to detect crop rows. We present a dataset for crop row detection with 11 field variations from Sugar Beet and Maize crops. We also present a novel crop row detection algorithm for visual servoing in crop row fields. Our algorithm can detect crop rows against varying field conditions such as curved crop rows, weed presence, discontinuities, growth stages, tramlines, shadows and light levels. Our method only uses RGB images from a front-mounted camera on a Husky robot to predict crop rows. Our method outperformed the classic colour based crop row detection baseline. Dense weed presence within inter-row space and discontinuities in crop rows were the most challenging field conditions for our crop row detection algorithm. Our method can detect the end of the crop row and navigate the robot towards the headland area when it reaches the end of the crop row.
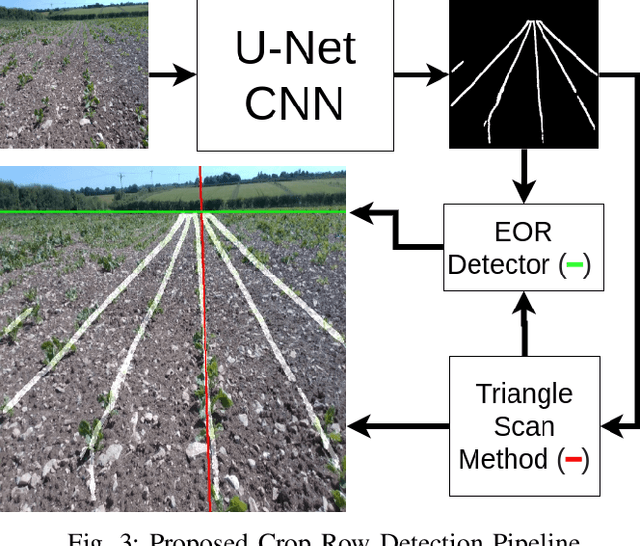
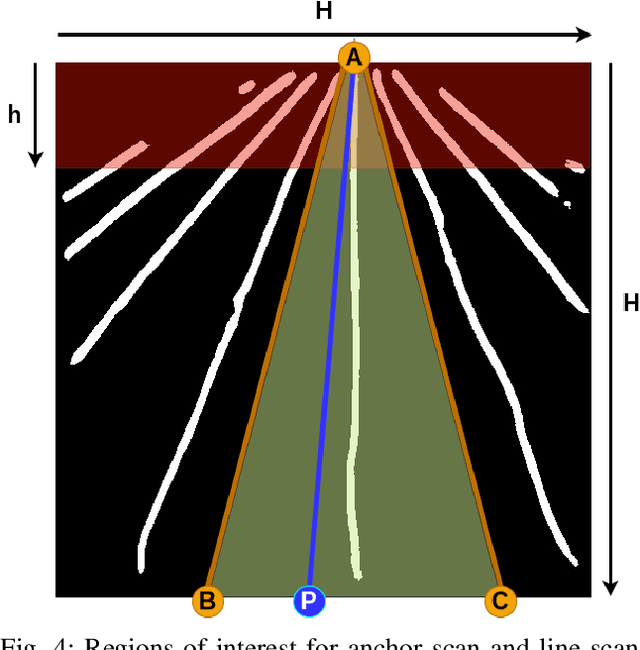
Deep learning-based Crop Row Following for Infield Navigation of Agri-Robots
Sep 09, 2022
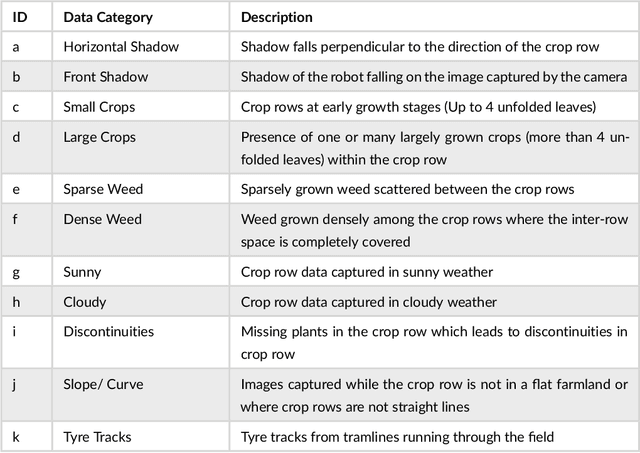
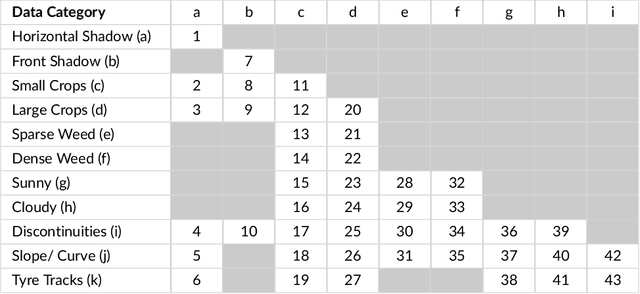
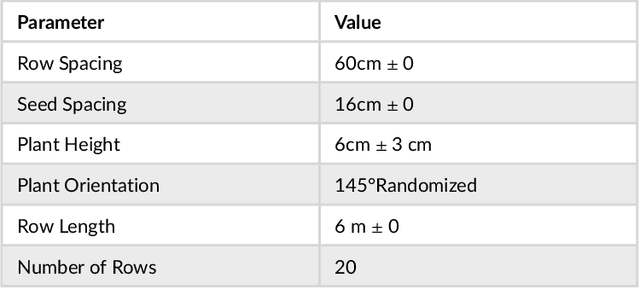
Autonomous navigation in agricultural environments is often challenged by varying field conditions that may arise in arable fields. The state-of-the-art solutions for autonomous navigation in these agricultural environments will require expensive hardware such as RTK-GPS. This paper presents a robust crop row detection algorithm that can withstand those variations while detecting crop rows for visual servoing. A dataset of sugar beet images was created with 43 combinations of 11 field variations found in arable fields. The novel crop row detection algorithm is tested both for the crop row detection performance and also the capability of visual servoing along a crop row. The algorithm only uses RGB images as input and a convolutional neural network was used to predict crop row masks. Our algorithm outperformed the baseline method which uses colour-based segmentation for all the combinations of field variations. We use a combined performance indicator that accounts for the angular and displacement errors of the crop row detection. Our algorithm exhibited the worst performance during the early growth stages of the crop.