 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHARC: Reference point driven Spherical Harmonic Representation for Complex Shapes
Apr 02, 2026We propose SHARC, a novel framework that synthesizes arbitrary, genus-agnostic shapes by means of a collection of Spherical Harmonic (SH) representations of distance fields. These distance fields are anchored at optimally placed reference points in the interior volume of the surface in a way that maximizes learning of the finer details of the surface. To achieve this, we employ a cost function that jointly maximizes sparsity and centrality in terms of positioning, as well as visibility of the surface from their location. For each selected reference point, we sample the visible distance field to the surface geometry via ray-casting and compute the SH coefficients using the Fast Spherical Harmonic Transform (FSHT). To enhance geometric fidelity, we apply a configurable low-pass filter to the coefficients and refine the output using a local consistency constraint based on proximity. Evaluation of SHARC against state-of-the-art methods demonstrates that the proposed method outperforms existing approaches in both reconstruction accuracy and time efficiency without sacrificing model parsimony. The source code is available at https://github.com/POSE-Lab/SHARC.
Shape Representation using Gaussian Process mixture models
Apr 01, 2026Traditional explicit 3D representations, such as point clouds and meshes, demand significant storage to capture fine geometric details and require complex indexing systems for surface lookups, making functional representations an efficient, compact, and continuous alternative. In this work, we propose a novel, object-specific functional shape representation that models surface geometry with Gaussian Process (GP) mixture models. Rather than relying on computationally heavy neural architectures, our method is lightweight, leveraging GPs to learn continuous directional distance fields from sparsely sampled point clouds. We capture complex topologies by anchoring local GP priors at strategic reference points, which can be flexibly extracted using any structural decomposition method (e.g. skeletonization, distance-based clustering). Extensive evaluations on the ShapeNetCore and IndustryShapes datasets demonstrate that our method can efficiently and accurately represent complex geometries.
COBRA -- COnfidence score Based on shape Regression Analysis for method-independent quality assessment of object pose estimation from single images
Apr 25, 2024We present a generic algorithm for scoring pose estimation methods that rely on single image semantic analysis. The algorithm employs a lightweight putative shape representation using a combination of multiple Gaussian Processes. Each Gaussian Process (GP) yields distance normal distributions from multiple reference points in the object's coordinate system to its surface, thus providing a geometric evaluation framework for scoring predicted poses. Our confidence measure comprises the average mixture probability of pixel back-projections onto the shape template. In the reported experiments, we compare the accuracy of our GP based representation of objects versus the actual geometric models and demonstrate the ability of our method to capture the influence of outliers as opposed to the corresponding intrinsic measures that ship with the segmentation and pose estimation methods.
Monocular Visual Odometry for an Unmanned Sea-Surface Vehicle
Jul 19, 2017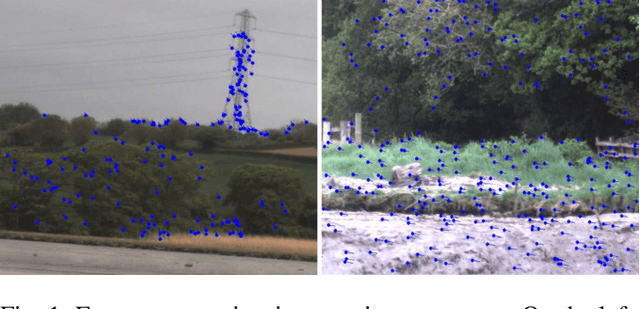
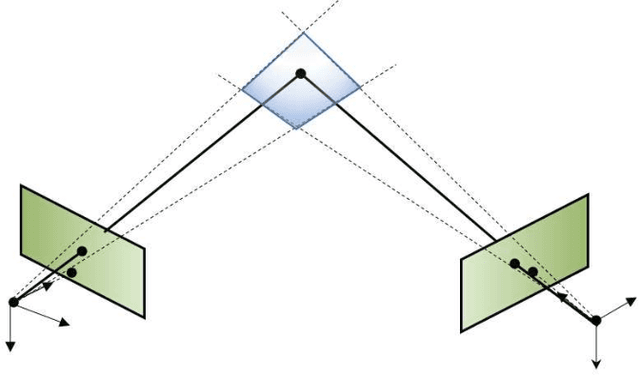

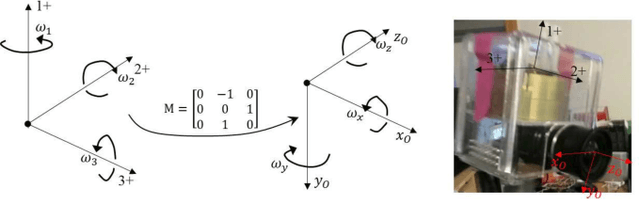
We tackle the problem of localizing an autonomous sea-surface vehicle in river estuarine areas using monocular camera and angular velocity input from an inertial sensor. Our method is challenged by two prominent drawbacks associated with the environment, which are typically not present in standard visual simultaneous localization and mapping (SLAM) applications on land (or air): a) Scene depth varies significantly (from a few meters to several kilometers) and, b) In conjunction to the latter, there exists no ground plane to provide features with enough disparity based on which to reliably detect motion. To that end, we use the IMU orientation feedback in order to re-cast the problem of visual localization without the mapping component, although the map can be implicitly obtained from the camera pose estimates. We find that our method produces reliable odometry estimates for trajectories several hundred meters long in the water. To compare the visual odometry estimates with GPS based ground truth, we interpolate the trajectory with splines on a common parameter and obtain position error in meters recovering an optimal affine transformation between the two splines.