 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBokehFlow: Depth-Free Controllable Bokeh Rendering via Flow Matching
Nov 19, 2025



Bokeh rendering simulates the shallow depth-of-field effect in photography, enhancing visual aesthetics and guiding viewer attention to regions of interest. Although recent approaches perform well, rendering controllable bokeh without additional depth inputs remains a significant challenge. Existing classical and neural controllable methods rely on accurate depth maps, while generative approaches often struggle with limited controllability and efficiency. In this paper, we propose BokehFlow, a depth-free framework for controllable bokeh rendering based on flow matching. BokehFlow directly synthesizes photorealistic bokeh effects from all-in-focus images, eliminating the need for depth inputs. It employs a cross-attention mechanism to enable semantic control over both focus regions and blur intensity via text prompts. To support training and evaluation, we collect and synthesize four datasets. Extensive experiments demonstrate that BokehFlow achieves visually compelling bokeh effects and offers precise control, outperforming existing depth-dependent and generative methods in both rendering quality and efficiency.
Generalized Category Discovery in Event-Centric Contexts: Latent Pattern Mining with LLMs
May 29, 2025Generalized Category Discovery (GCD) aims to classify both known and novel categories using partially labeled data that contains only known classes. Despite achieving strong performance on existing benchmarks, current textual GCD methods lack sufficient validation in realistic settings. We introduce Event-Centric GCD (EC-GCD), characterized by long, complex narratives and highly imbalanced class distributions, posing two main challenges: (1) divergent clustering versus classification groupings caused by subjective criteria, and (2) Unfair alignment for minority classes. To tackle these, we propose PaMA, a framework leveraging LLMs to extract and refine event patterns for improved cluster-class alignment. Additionally, a ranking-filtering-mining pipeline ensures balanced representation of prototypes across imbalanced categories. Evaluations on two EC-GCD benchmarks, including a newly constructed Scam Report dataset, demonstrate that PaMA outperforms prior methods with up to 12.58% H-score gains, while maintaining strong generalization on base GCD datasets.
Bulk-Switching Memristor-based Compute-In-Memory Module for Deep Neural Network Training
May 23, 2023The need for deep neural network (DNN) models with higher performance and better functionality leads to the proliferation of very large models. Model training, however, requires intensive computation time and energy. Memristor-based compute-in-memory (CIM) modules can perform vector-matrix multiplication (VMM) in situ and in parallel, and have shown great promises in DNN inference applications. However, CIM-based model training faces challenges due to non-linear weight updates, device variations, and low-precision in analog computing circuits. In this work, we experimentally implement a mixed-precision training scheme to mitigate these effects using a bulk-switching memristor CIM module. Lowprecision CIM modules are used to accelerate the expensive VMM operations, with high precision weight updates accumulated in digital units. Memristor devices are only changed when the accumulated weight update value exceeds a pre-defined threshold. The proposed scheme is implemented with a system-on-chip (SoC) of fully integrated analog CIM modules and digital sub-systems, showing fast convergence of LeNet training to 97.73%. The efficacy of training larger models is evaluated using realistic hardware parameters and shows that that analog CIM modules can enable efficient mix-precision DNN training with accuracy comparable to full-precision software trained models. Additionally, models trained on chip are inherently robust to hardware variations, allowing direct mapping to CIM inference chips without additional re-training.
Design and Control of a Highly Redundant Rigid-Flexible Coupling Robot to Assist the COVID-19 Oropharyngeal-Swab Sampling
Feb 25, 2021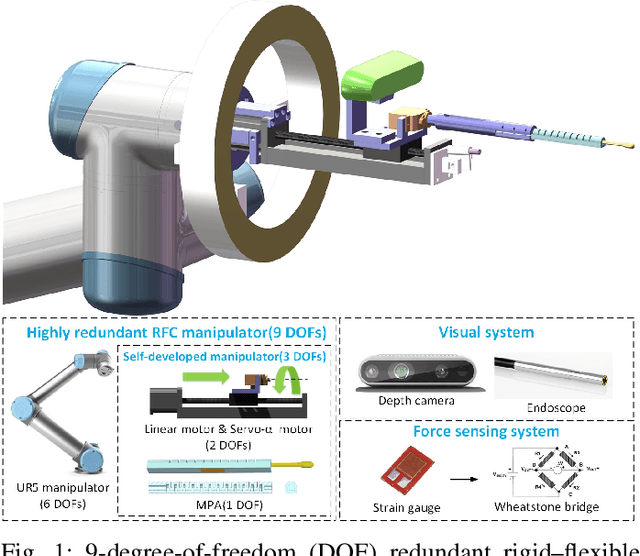
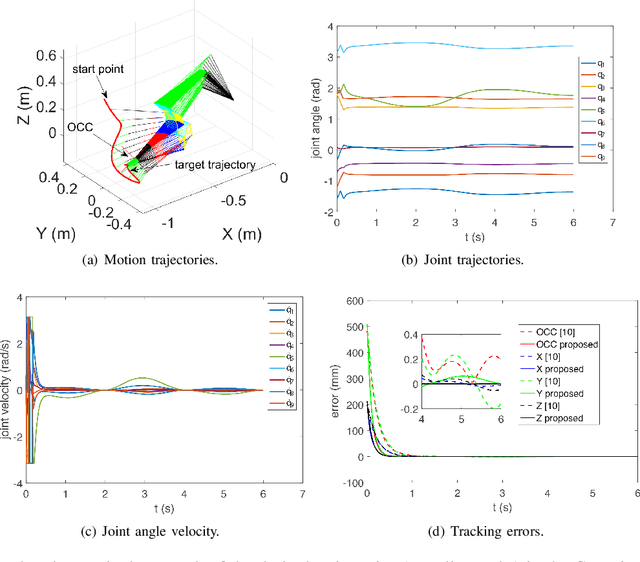
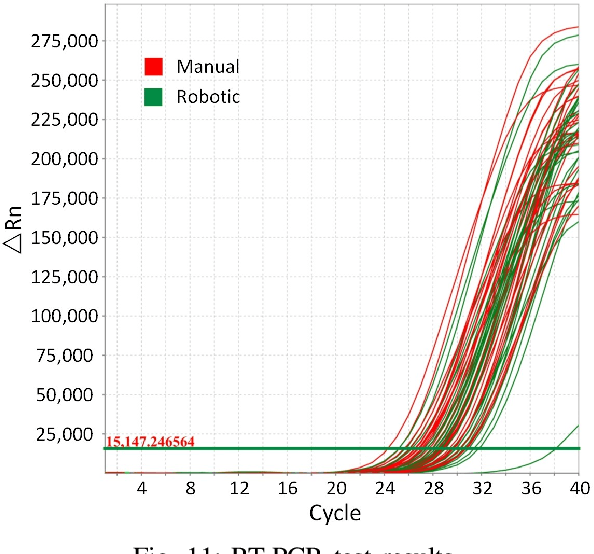
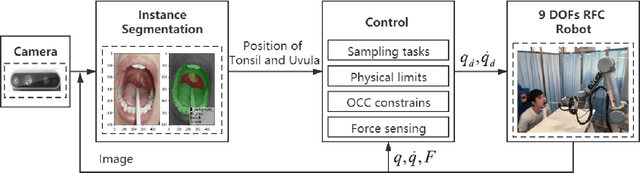
The outbreak of novel coronavirus pneumonia (COVID-19) has caused mortality and morbidity worldwide. Oropharyngeal-swab (OP-swab) sampling is widely used for the diagnosis of COVID-19 in the world. To avoid the clinical staff from being affected by the virus, we developed a 9-degree-of-freedom (DOF) rigid-flexible coupling (RFC) robot to assist the COVID-19 OP-swab sampling. This robot is composed of a visual system, UR5 robot arm, micro-pneumatic actuator and force-sensing system. The robot is expected to reduce risk and free up the clinical staff from the long-term repetitive sampling work. Compared with a rigid sampling robot, the developed force-sensing RFC robot can facilitate OP-swab sampling procedures in a safer and softer way. In addition, a varying-parameter zeroing neural network-based optimization method is also proposed for motion planning of the 9-DOF redundant manipulator. The developed robot system is validated by OP-swab sampling on both oral cavity phantoms and volunteers.