 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFluSplat: Sparse-View 3D Editing without Test-Time Optimization
Apr 21, 2026Recent advances in text-guided image editing and 3D Gaussian Splatting (3DGS) have enabled high-quality 3D scene manipulation. However, existing pipelines rely on iterative edit-and-fit optimization at test time, alternating between 2D diffusion editing and 3D reconstruction. This process is computationally expensive, scene-specific, and prone to cross-view inconsistencies. We propose a feed-forward framework for cross-view consistent 3D scene editing from sparse views. Instead of enforcing consistency through iterative 3D refinement, we introduce a cross-view regularization scheme in the image domain during training. By jointly supervising multi-view edits with geometric alignment constraints, our model produces view-consistent results without per-scene optimization at inference. The edited views are then lifted into 3D via a feedforward 3DGS model, yielding a coherent 3DGS representation in a single forward pass. Experiments demonstrate competitive editing fidelity and substantially improved cross-view consistency compared to optimization-based methods, while reducing inference time by orders of magnitude.
FAST3DIS: Feed-forward Anchored Scene Transformer for 3D Instance Segmentation
Mar 27, 2026While recent feed-forward 3D reconstruction models provide a strong geometric foundation for scene understanding, extending them to 3D instance segmentation typically relies on a disjointed "lift-and-cluster" paradigm. Grouping dense pixel-wise embeddings via non-differentiable clustering scales poorly with the number of views and disconnects representation learning from the final segmentation objective. In this paper, we present a Feed-forward Anchored Scene Transformer for 3D Instance Segmentation (FAST3DIS), an end-to-end approach that effectively bypasses post-hoc clustering. We introduce a 3D-anchored, query-based Transformer architecture built upon a foundational depth backbone, adapted efficiently to learn instance-specific semantics while retaining its zero-shot geometric priors. We formulate a learned 3D anchor generator coupled with an anchor-sampling cross-attention mechanism for view-consistent 3D instance segmentation. By projecting 3D object queries directly into multi-view feature maps, our method samples context efficiently. Furthermore, we introduce a dual-level regularization strategy, that couples multi-view contrastive learning with a dynamically scheduled spatial overlap penalty to explicitly prevent query collisions and ensure precise instance boundaries. Experiments on complex indoor 3D datasets demonstrate that our approach achieves competitive segmentation accuracy with significantly improved memory scalability and inference speed over state-of-the-art clustering-based methods.
GRLoc: Geometric Representation Regression for Visual Localization
Nov 17, 2025



Absolute Pose Regression (APR) has emerged as a compelling paradigm for visual localization. However, APR models typically operate as black boxes, directly regressing a 6-DoF pose from a query image, which can lead to memorizing training views rather than understanding 3D scene geometry. In this work, we propose a geometrically-grounded alternative. Inspired by novel view synthesis, which renders images from intermediate geometric representations, we reformulate APR as its inverse that regresses the underlying 3D representations directly from the image, and we name this paradigm Geometric Representation Regression (GRR). Our model explicitly predicts two disentangled geometric representations in the world coordinate system: (1) a ray bundle's directions to estimate camera rotation, and (2) a corresponding pointmap to estimate camera translation. The final 6-DoF camera pose is then recovered from these geometric components using a differentiable deterministic solver. This disentangled approach, which separates the learned visual-to-geometry mapping from the final pose calculation, introduces a strong geometric prior into the network. We find that the explicit decoupling of rotation and translation predictions measurably boosts performance. We demonstrate state-of-the-art performance on 7-Scenes and Cambridge Landmarks datasets, validating that modeling the inverse rendering process is a more robust path toward generalizable absolute pose estimation.
RLGS: Reinforcement Learning-Based Adaptive Hyperparameter Tuning for Gaussian Splatting
Aug 06, 2025



Hyperparameter tuning in 3D Gaussian Splatting (3DGS) is a labor-intensive and expert-driven process, often resulting in inconsistent reconstructions and suboptimal results. We propose RLGS, a plug-and-play reinforcement learning framework for adaptive hyperparameter tuning in 3DGS through lightweight policy modules, dynamically adjusting critical hyperparameters such as learning rates and densification thresholds. The framework is model-agnostic and seamlessly integrates into existing 3DGS pipelines without architectural modifications. We demonstrate its generalization ability across multiple state-of-the-art 3DGS variants, including Taming-3DGS and 3DGS-MCMC, and validate its robustness across diverse datasets. RLGS consistently enhances rendering quality. For example, it improves Taming-3DGS by 0.7dB PSNR on the Tanks and Temple (TNT) dataset, under a fixed Gaussian budget, and continues to yield gains even when baseline performance saturates. Our results suggest that RLGS provides an effective and general solution for automating hyperparameter tuning in 3DGS training, bridging a gap in applying reinforcement learning to 3DGS.
ActiveGAMER: Active GAussian Mapping through Efficient Rendering
Jan 12, 2025



We introduce ActiveGAMER, an active mapping system that utilizes 3D Gaussian Splatting (3DGS) to achieve high-quality, real-time scene mapping and exploration. Unlike traditional NeRF-based methods, which are computationally demanding and restrict active mapping performance, our approach leverages the efficient rendering capabilities of 3DGS, allowing effective and efficient exploration in complex environments. The core of our system is a rendering-based information gain module that dynamically identifies the most informative viewpoints for next-best-view planning, enhancing both geometric and photometric reconstruction accuracy. ActiveGAMER also integrates a carefully balanced framework, combining coarse-to-fine exploration, post-refinement, and a global-local keyframe selection strategy to maximize reconstruction completeness and fidelity. Our system autonomously explores and reconstructs environments with state-of-the-art geometric and photometric accuracy and completeness, significantly surpassing existing approaches in both aspects. Extensive evaluations on benchmark datasets such as Replica and MP3D highlight ActiveGAMER's effectiveness in active mapping tasks.
NARUTO: Neural Active Reconstruction from Uncertain Target Observations
Feb 29, 2024We present NARUTO, a neural active reconstruction system that combines a hybrid neural representation with uncertainty learning, enabling high-fidelity surface reconstruction. Our approach leverages a multi-resolution hash-grid as the mapping backbone, chosen for its exceptional convergence speed and capacity to capture high-frequency local features.The centerpiece of our work is the incorporation of an uncertainty learning module that dynamically quantifies reconstruction uncertainty while actively reconstructing the environment. By harnessing learned uncertainty, we propose a novel uncertainty aggregation strategy for goal searching and efficient path planning. Our system autonomously explores by targeting uncertain observations and reconstructs environments with remarkable completeness and fidelity. We also demonstrate the utility of this uncertainty-aware approach by enhancing SOTA neural SLAM systems through an active ray sampling strategy. Extensive evaluations of NARUTO in various environments, using an indoor scene simulator, confirm its superior performance and state-of-the-art status in active reconstruction, as evidenced by its impressive results on benchmark datasets like Replica and MP3D.
PlanarNeRF: Online Learning of Planar Primitives with Neural Radiance Fields
Dec 30, 2023Identifying spatially complete planar primitives from visual data is a crucial task in computer vision. Prior methods are largely restricted to either 2D segment recovery or simplifying 3D structures, even with extensive plane annotations. We present PlanarNeRF, a novel framework capable of detecting dense 3D planes through online learning. Drawing upon the neural field representation, PlanarNeRF brings three major contributions. First, it enhances 3D plane detection with concurrent appearance and geometry knowledge. Second, a lightweight plane fitting module is proposed to estimate plane parameters. Third, a novel global memory bank structure with an update mechanism is introduced, ensuring consistent cross-frame correspondence. The flexible architecture of PlanarNeRF allows it to function in both 2D-supervised and self-supervised solutions, in each of which it can effectively learn from sparse training signals, significantly improving training efficiency. Through extensive experiments, we demonstrate the effectiveness of PlanarNeRF in various scenarios and remarkable improvement over existing works.
Dynamic Voxel Grid Optimization for High-Fidelity RGB-D Supervised Surface Reconstruction
Apr 12, 2023Direct optimization of interpolated features on multi-resolution voxel grids has emerged as a more efficient alternative to MLP-like modules. However, this approach is constrained by higher memory expenses and limited representation capabilities. In this paper, we introduce a novel dynamic grid optimization method for high-fidelity 3D surface reconstruction that incorporates both RGB and depth observations. Rather than treating each voxel equally, we optimize the process by dynamically modifying the grid and assigning more finer-scale voxels to regions with higher complexity, allowing us to capture more intricate details. Furthermore, we develop a scheme to quantify the dynamic subdivision of voxel grid during optimization without requiring any priors. The proposed approach is able to generate high-quality 3D reconstructions with fine details on both synthetic and real-world data, while maintaining computational efficiency, which is substantially faster than the baseline method NeuralRGBD.
CLIP-FLow: Contrastive Learning by semi-supervised Iterative Pseudo labeling for Optical Flow Estimation
Nov 01, 2022



Synthetic datasets are often used to pretrain end-to-end optical flow networks, due to the lack of a large amount of labeled, real-scene data. But major drops in accuracy occur when moving from synthetic to real scenes. How do we better transfer the knowledge learned from synthetic to real domains? To this end, we propose CLIP-FLow, a semi-supervised iterative pseudo-labeling framework to transfer the pretraining knowledge to the target real domain. We leverage large-scale, unlabeled real data to facilitate transfer learning with the supervision of iteratively updated pseudo-ground truth labels, bridging the domain gap between the synthetic and the real. In addition, we propose a contrastive flow loss on reference features and the warped features by pseudo ground truth flows, to further boost the accurate matching and dampen the mismatching due to motion, occlusion, or noisy pseudo labels. We adopt RAFT as the backbone and obtain an F1-all error of 4.11%, i.e. a 19% error reduction from RAFT (5.10%) and ranking 2$^{nd}$ place at submission on the KITTI 2015 benchmark. Our framework can also be extended to other models, e.g. CRAFT, reducing the F1-all error from 4.79% to 4.66% on KITTI 2015 benchmark.
CNN-Augmented Visual-Inertial SLAM with Planar Constraints
May 05, 2022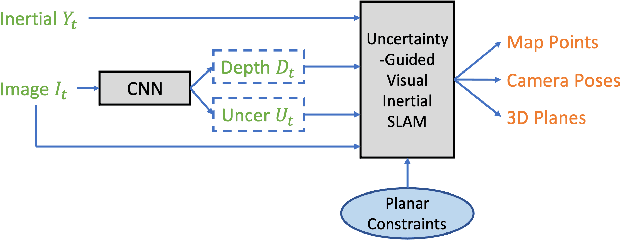
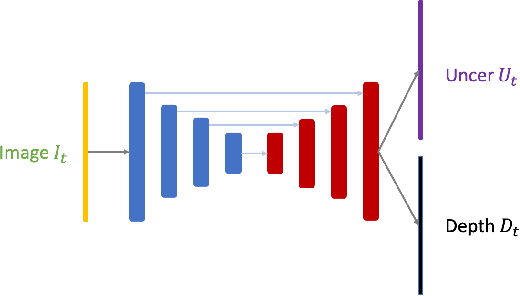
We present a robust visual-inertial SLAM system that combines the benefits of Convolutional Neural Networks (CNNs) and planar constraints. Our system leverages a CNN to predict the depth map and the corresponding uncertainty map for each image. The CNN depth effectively bootstraps the back-end optimization of SLAM and meanwhile the CNN uncertainty adaptively weighs the contribution of each feature point to the back-end optimization. Given the gravity direction from the inertial sensor, we further present a fast plane detection method that detects horizontal planes via one-point RANSAC and vertical planes via two-point RANSAC. Those stably detected planes are in turn used to regularize the back-end optimization of SLAM. We evaluate our system on a public dataset, \ie, EuRoC, and demonstrate improved results over a state-of-the-art SLAM system, \ie, ORB-SLAM3.