 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Theory of Regularized Markov Decision Processes
Jan 31, 2019Many recent successful (deep) reinforcement learning algorithms make use of regularization, generally based on entropy or on Kullback-Leibler divergence. We propose a general theory of regularized Markov Decision Processes that generalizes these approaches in two directions: we consider a larger class of regularizers, and we consider the general modified policy iteration approach, encompassing both policy iteration and value iteration. The core building blocks of this theory are a notion of regularized Bellman operator and the Legendre-Fenchel transform, a classical tool of convex optimization. This approach allows for error propagation analyses of general algorithmic schemes of which (possibly variants of) classical algorithms such as Trust Region Policy Optimization, Soft Q-learning, Stochastic Actor Critic or Dynamic Policy Programming are special cases. This also draws connections to proximal convex optimization, especially to Mirror Descent.
Visual Reasoning with Multi-hop Feature Modulation
Oct 12, 2018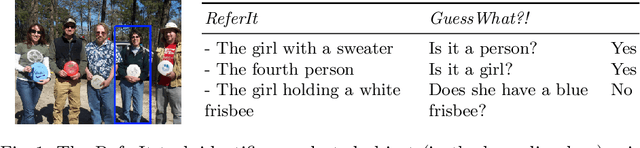
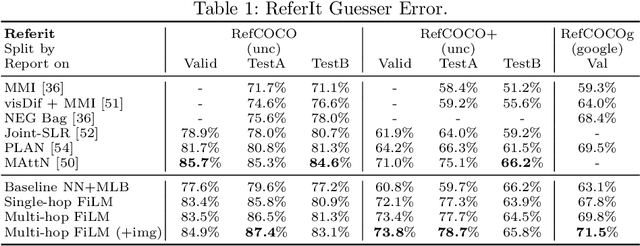
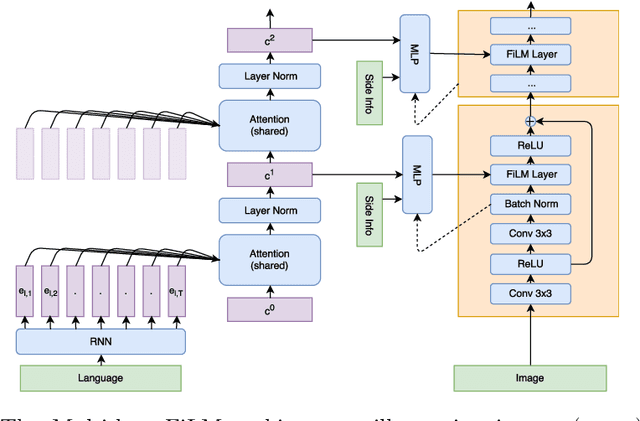
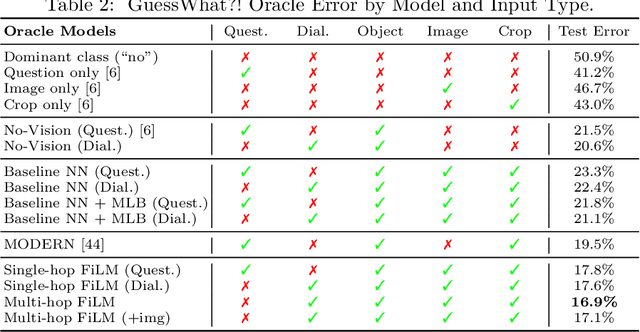
Recent breakthroughs in computer vision and natural language processing have spurred interest in challenging multi-modal tasks such as visual question-answering and visual dialogue. For such tasks, one successful approach is to condition image-based convolutional network computation on language via Feature-wise Linear Modulation (FiLM) layers, i.e., per-channel scaling and shifting. We propose to generate the parameters of FiLM layers going up the hierarchy of a convolutional network in a multi-hop fashion rather than all at once, as in prior work. By alternating between attending to the language input and generating FiLM layer parameters, this approach is better able to scale to settings with longer input sequences such as dialogue. We demonstrate that multi-hop FiLM generation achieves state-of-the-art for the short input sequence task ReferIt --- on-par with single-hop FiLM generation --- while also significantly outperforming prior state-of-the-art and single-hop FiLM generation on the GuessWhat?! visual dialogue task.
Leveraging Demonstrations for Deep Reinforcement Learning on Robotics Problems with Sparse Rewards
Oct 08, 2018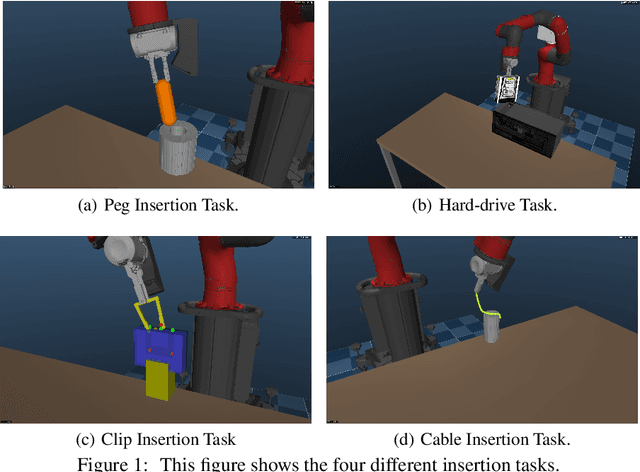
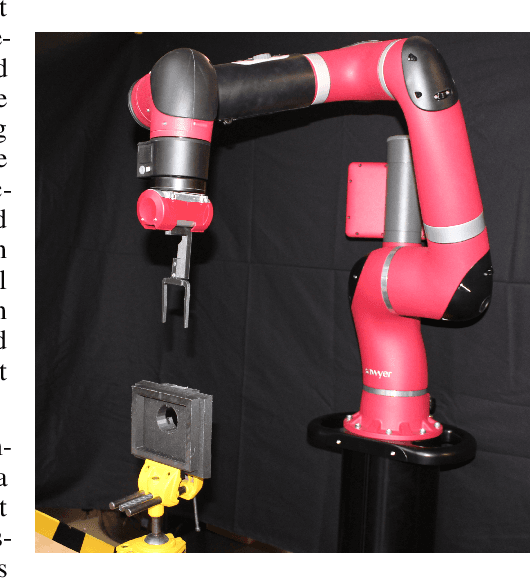
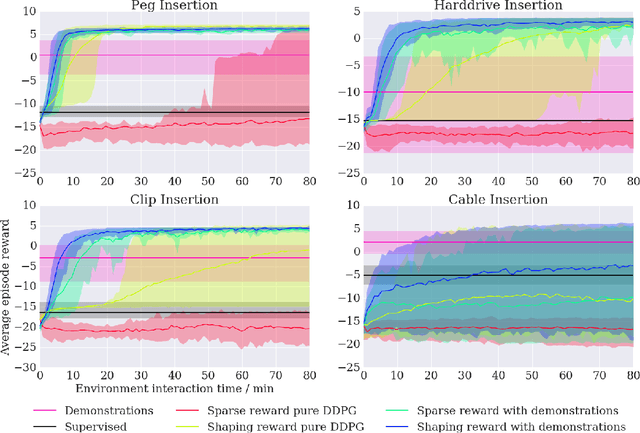
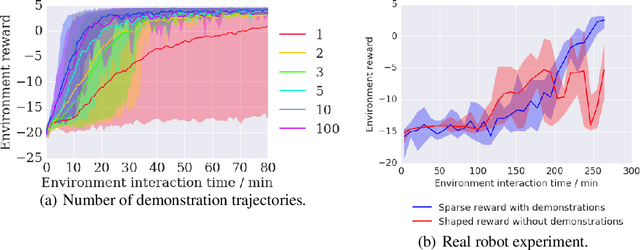
We propose a general and model-free approach for Reinforcement Learning (RL) on real robotics with sparse rewards. We build upon the Deep Deterministic Policy Gradient (DDPG) algorithm to use demonstrations. Both demonstrations and actual interactions are used to fill a replay buffer and the sampling ratio between demonstrations and transitions is automatically tuned via a prioritized replay mechanism. Typically, carefully engineered shaping rewards are required to enable the agents to efficiently explore on high dimensional control problems such as robotics. They are also required for model-based acceleration methods relying on local solvers such as iLQG (e.g. Guided Policy Search and Normalized Advantage Function). The demonstrations replace the need for carefully engineered rewards, and reduce the exploration problem encountered by classical RL approaches in these domains. Demonstrations are collected by a robot kinesthetically force-controlled by a human demonstrator. Results on four simulated insertion tasks show that DDPG from demonstrations out-performs DDPG, and does not require engineered rewards. Finally, we demonstrate the method on a real robotics task consisting of inserting a clip (flexible object) into a rigid object.
Playing the Game of Universal Adversarial Perturbations
Sep 25, 2018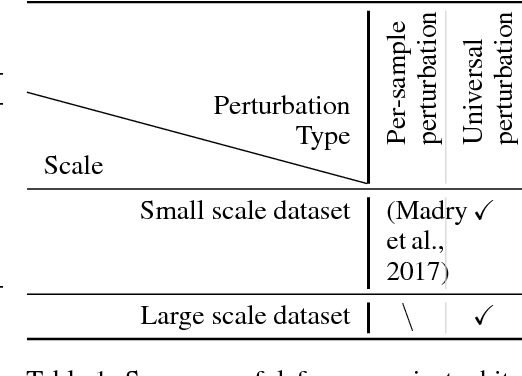
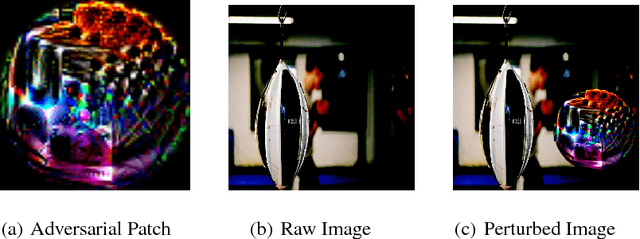
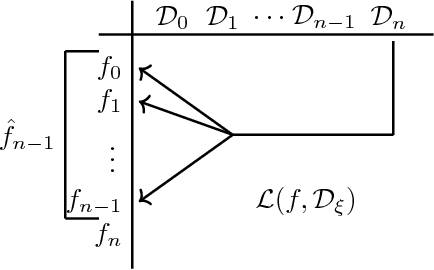
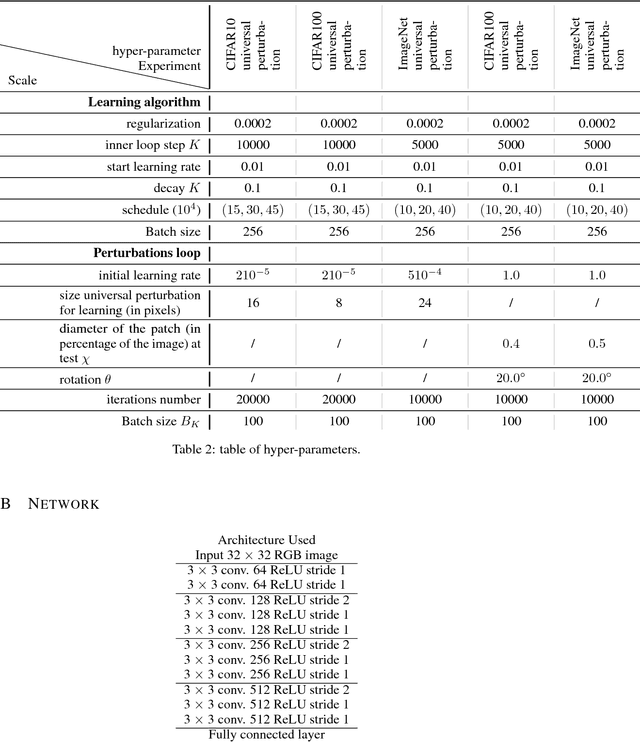
We study the problem of learning classifiers robust to universal adversarial perturbations. While prior work approaches this problem via robust optimization, adversarial training, or input transformation, we instead phrase it as a two-player zero-sum game. In this new formulation, both players simultaneously play the same game, where one player chooses a classifier that minimizes a classification loss whilst the other player creates an adversarial perturbation that increases the same loss when applied to every sample in the training set. By observing that performing a classification (respectively creating adversarial samples) is the best response to the other player, we propose a novel extension of a game-theoretic algorithm, namely fictitious play, to the domain of training robust classifiers. Finally, we empirically show the robustness and versatility of our approach in two defence scenarios where universal attacks are performed on several image classification datasets -- CIFAR10, CIFAR100 and ImageNet.
Observe and Look Further: Achieving Consistent Performance on Atari
May 29, 2018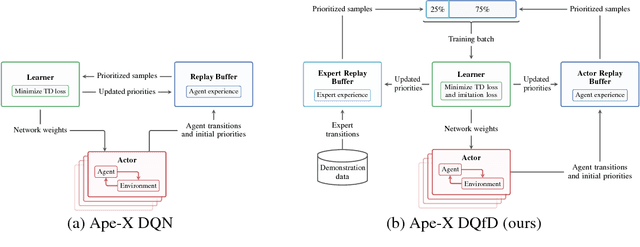
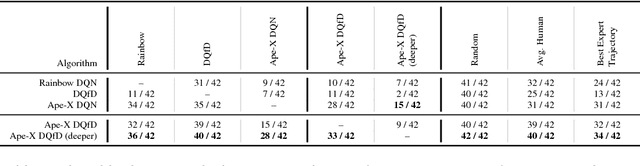
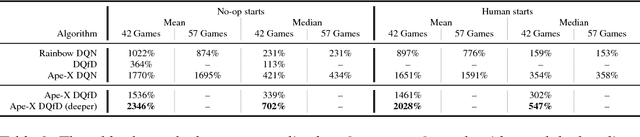
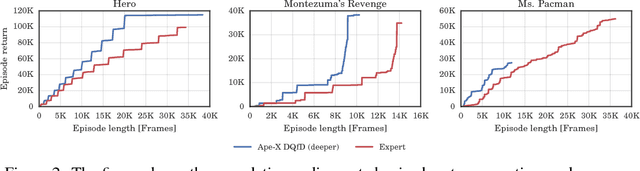
Despite significant advances in the field of deep Reinforcement Learning (RL), today's algorithms still fail to learn human-level policies consistently over a set of diverse tasks such as Atari 2600 games. We identify three key challenges that any algorithm needs to master in order to perform well on all games: processing diverse reward distributions, reasoning over long time horizons, and exploring efficiently. In this paper, we propose an algorithm that addresses each of these challenges and is able to learn human-level policies on nearly all Atari games. A new transformed Bellman operator allows our algorithm to process rewards of varying densities and scales; an auxiliary temporal consistency loss allows us to train stably using a discount factor of $\gamma = 0.999$ (instead of $\gamma = 0.99$) extending the effective planning horizon by an order of magnitude; and we ease the exploration problem by using human demonstrations that guide the agent towards rewarding states. When tested on a set of 42 Atari games, our algorithm exceeds the performance of an average human on 40 games using a common set of hyper parameters. Furthermore, it is the first deep RL algorithm to solve the first level of Montezuma's Revenge.
Noisy Networks for Exploration
Feb 15, 2018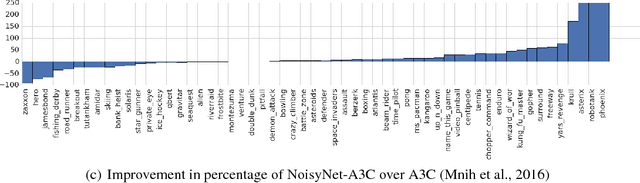
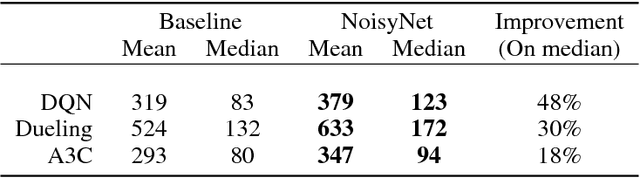
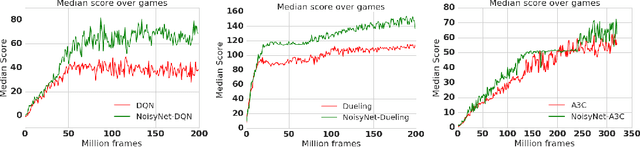
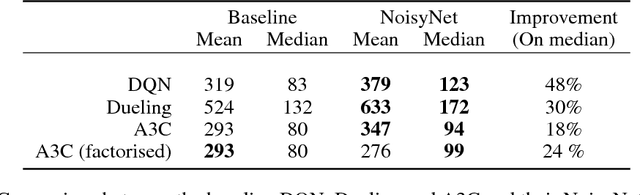
We introduce NoisyNet, a deep reinforcement learning agent with parametric noise added to its weights, and show that the induced stochasticity of the agent's policy can be used to aid efficient exploration. The parameters of the noise are learned with gradient descent along with the remaining network weights. NoisyNet is straightforward to implement and adds little computational overhead. We find that replacing the conventional exploration heuristics for A3C, DQN and dueling agents (entropy reward and $\epsilon$-greedy respectively) with NoisyNet yields substantially higher scores for a wide range of Atari games, in some cases advancing the agent from sub to super-human performance.
End-to-End Automatic Speech Translation of Audiobooks
Feb 12, 2018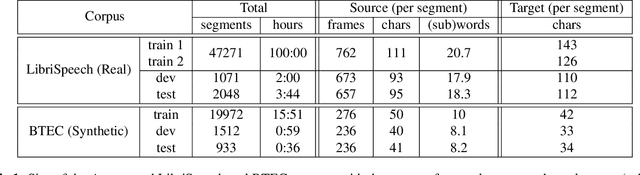
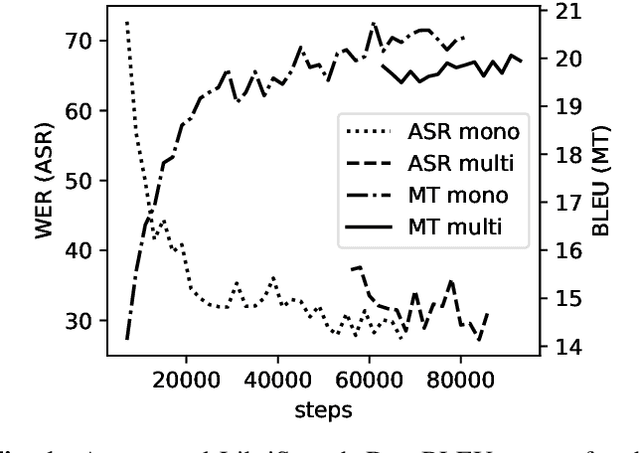
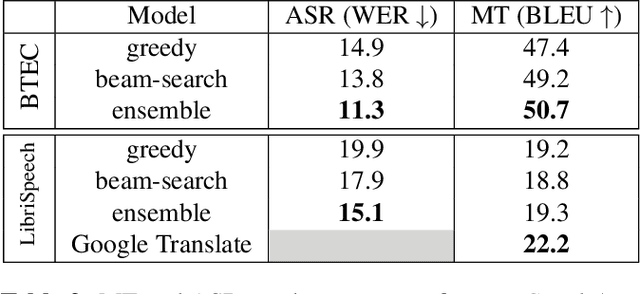
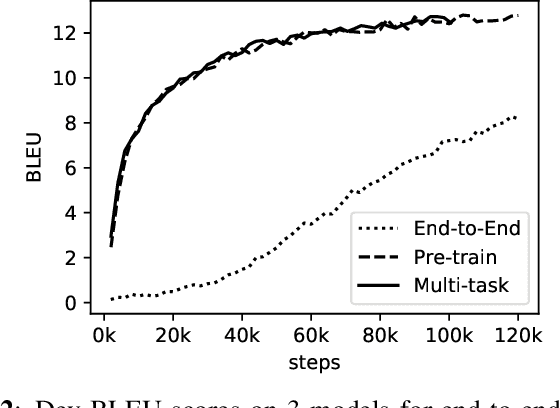
We investigate end-to-end speech-to-text translation on a corpus of audiobooks specifically augmented for this task. Previous works investigated the extreme case where source language transcription is not available during learning nor decoding, but we also study a midway case where source language transcription is available at training time only. In this case, a single model is trained to decode source speech into target text in a single pass. Experimental results show that it is possible to train compact and efficient end-to-end speech translation models in this setup. We also distribute the corpus and hope that our speech translation baseline on this corpus will be challenged in the future.
Modulating early visual processing by language
Dec 18, 2017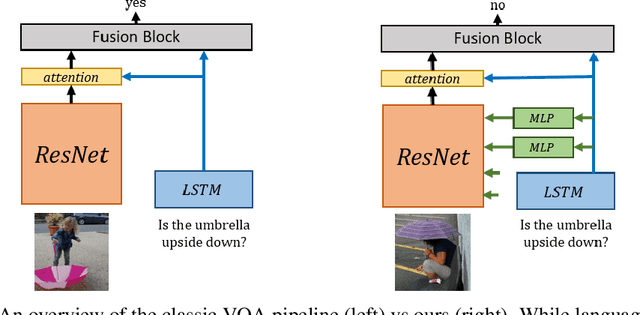
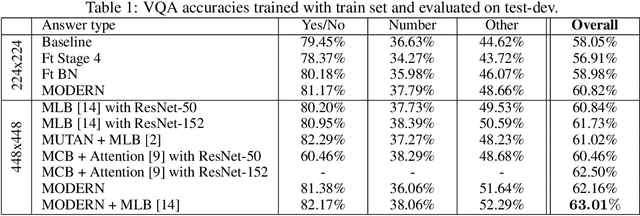
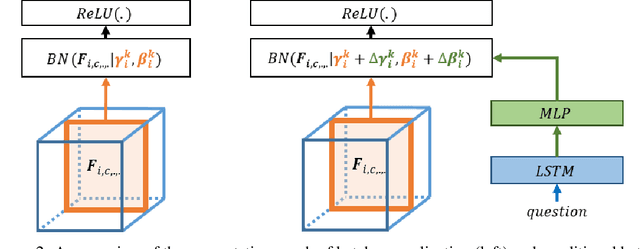
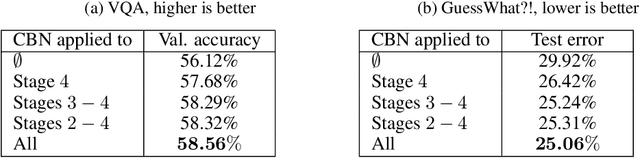
It is commonly assumed that language refers to high-level visual concepts while leaving low-level visual processing unaffected. This view dominates the current literature in computational models for language-vision tasks, where visual and linguistic input are mostly processed independently before being fused into a single representation. In this paper, we deviate from this classic pipeline and propose to modulate the \emph{entire visual processing} by linguistic input. Specifically, we condition the batch normalization parameters of a pretrained residual network (ResNet) on a language embedding. This approach, which we call MOdulated RESnet (\MRN), significantly improves strong baselines on two visual question answering tasks. Our ablation study shows that modulating from the early stages of the visual processing is beneficial.
Is the Bellman residual a bad proxy?
Dec 12, 2017
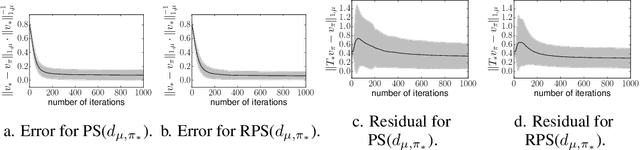
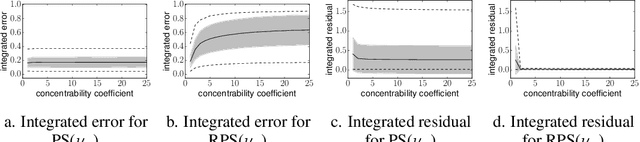
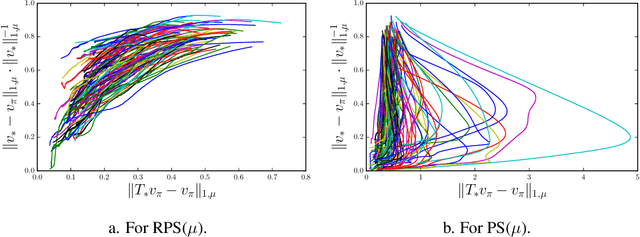
This paper aims at theoretically and empirically comparing two standard optimization criteria for Reinforcement Learning: i) maximization of the mean value and ii) minimization of the Bellman residual. For that purpose, we place ourselves in the framework of policy search algorithms, that are usually designed to maximize the mean value, and derive a method that minimizes the residual $\|T_* v_\pi - v_\pi\|_{1,\nu}$ over policies. A theoretical analysis shows how good this proxy is to policy optimization, and notably that it is better than its value-based counterpart. We also propose experiments on randomly generated generic Markov decision processes, specifically designed for studying the influence of the involved concentrability coefficient. They show that the Bellman residual is generally a bad proxy to policy optimization and that directly maximizing the mean value is much better, despite the current lack of deep theoretical analysis. This might seem obvious, as directly addressing the problem of interest is usually better, but given the prevalence of (projected) Bellman residual minimization in value-based reinforcement learning, we believe that this question is worth to be considered.
Deep Q-learning from Demonstrations
Nov 22, 2017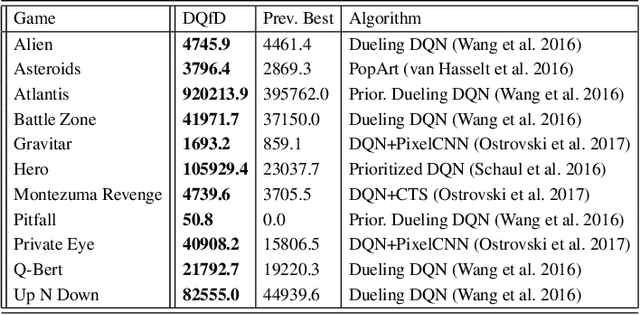
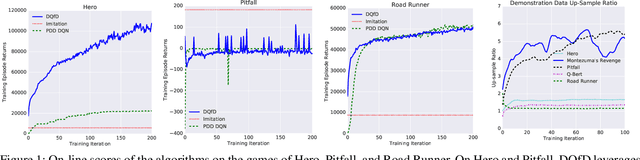
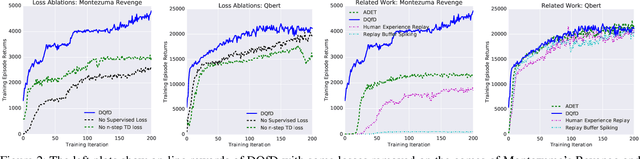
Deep reinforcement learning (RL) has achieved several high profile successes in difficult decision-making problems. However, these algorithms typically require a huge amount of data before they reach reasonable performance. In fact, their performance during learning can be extremely poor. This may be acceptable for a simulator, but it severely limits the applicability of deep RL to many real-world tasks, where the agent must learn in the real environment. In this paper we study a setting where the agent may access data from previous control of the system. We present an algorithm, Deep Q-learning from Demonstrations (DQfD), that leverages small sets of demonstration data to massively accelerate the learning process even from relatively small amounts of demonstration data and is able to automatically assess the necessary ratio of demonstration data while learning thanks to a prioritized replay mechanism. DQfD works by combining temporal difference updates with supervised classification of the demonstrator's actions. We show that DQfD has better initial performance than Prioritized Dueling Double Deep Q-Networks (PDD DQN) as it starts with better scores on the first million steps on 41 of 42 games and on average it takes PDD DQN 83 million steps to catch up to DQfD's performance. DQfD learns to out-perform the best demonstration given in 14 of 42 games. In addition, DQfD leverages human demonstrations to achieve state-of-the-art results for 11 games. Finally, we show that DQfD performs better than three related algorithms for incorporating demonstration data into DQN.