 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBEVIO: Efficient Bird's-Eye-View based Sparse-Update Visual-Inertial Odometry for Lunar Day-Night Navigation
May 30, 2026Visual-Inertial Odometry (VIO) provides smooth, high-rate state estimates and has been widely used for robotic navigation in both terrestrial and planetary applications. However, its performance is typically dependent on the frequency of visual updates, which is a challenge for planetary rovers operating under extreme resource constraints and low frame rates. This work investigates enabling reliable VIO with very sparse visual updates for lunar rover applications, addressing both day and night-time operations where feature associations become especially difficult under self-illumination conditions. We propose a Bird's Eye View (BEV)-based image matching scheme that remains robust to larger inter-frame motions and more reliable feature matching despite significant visual appearance changes. We extensively evaluate our proposed approach, BEVIO, through high-fidelity photorealistic lunar and real-time robotic experiments conducted using a half-scale lunar rover, in a long-term day-night deployment at Plaster City, CA, USA. The results demonstrate that our method enables reliable day and nighttime self-illuminated traverses at visual update rates as low as 0.25 Hz, underscoring its suitability for navigation on power- and compute-limited lunar rovers.
How to Deploy a 10-km Interferometric Radio Telescope on the Moon with Just Four Tethered Robots
Sep 06, 2022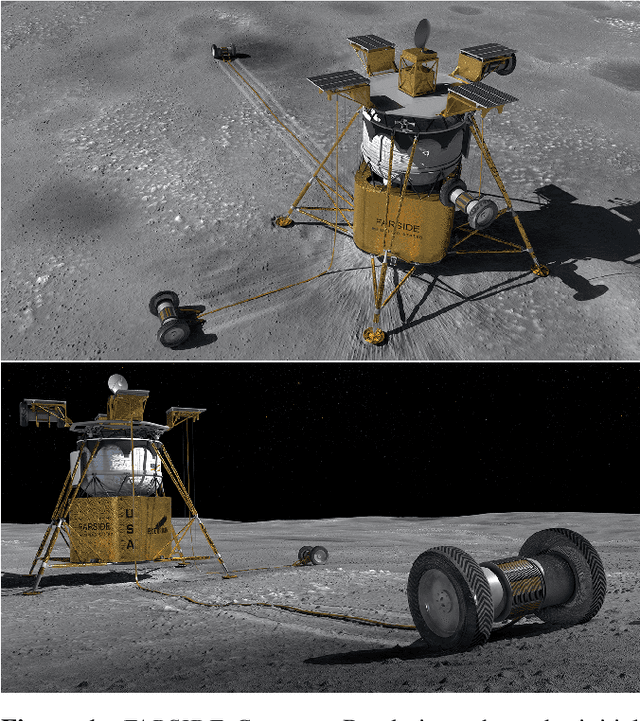
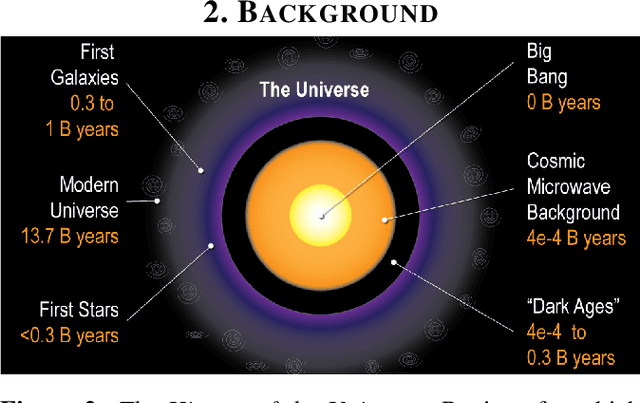
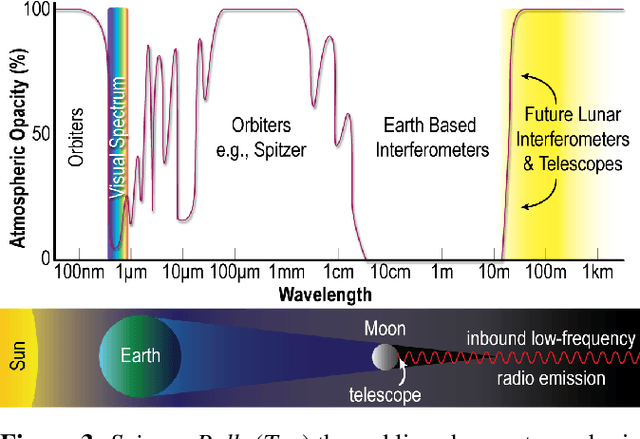
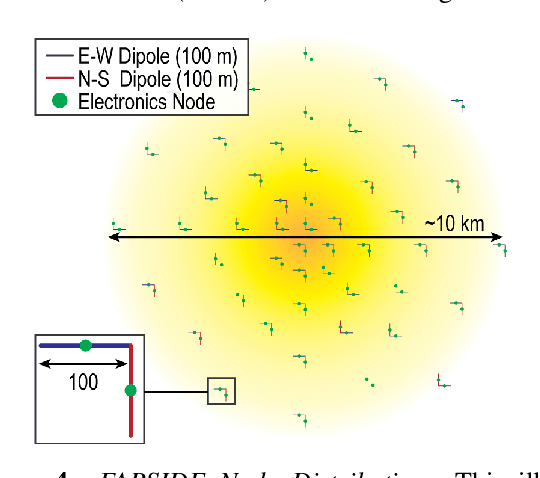
The Far-side Array for Radio Science Investigations of the Dark ages and Exoplanets (FARSIDE) is a proposed mission concept to the lunar far side that seeks to deploy and operate an array of 128 dual-polarization, dipole antennas over a region of 100 square kilometers. The resulting interferometric radio telescope would provide unprecedented radio images of distant star systems, allowing for the investigation of faint radio signatures of coronal mass ejections and energetic particle events and could also lead to the detection of magnetospheres around exoplanets within their parent star's habitable zone. Simultaneously, FARSIDE would also measure the "Dark Ages" of the early Universe at a global 21-cm signal across a range of red shifts (z approximately 50-100). Each discrete antenna node in the array is connected to a central hub (located at the lander) via a communication and power tether. Nodes are driven by cold=operable electronics that continuously monitor an extremely wide-band of frequencies (200 kHz to 40 MHz), which surpass the capabilities of Earth-based telescopes by two orders of magnitude. Achieving this ground-breaking capability requires a robust deployment strategy on the lunar surface, which is feasible with existing, high TRL technologies (demonstrated or under active development) and is capable of delivery to the surface on next-generation commercial landers, such as Blue Origin's Blue Moon Lander. This paper presents an antenna packaging, placement, and surface deployment trade study that leverages recent advances in tethered mobile robots under development at NASA's Jet Propulsion Laboratory, which are used to deploy a flat, antenna-embedded, tape tether with optical communication and power transmission capabilities.
* 8 pages, 17 figures, IEEE Aerospace Conference Proceedings, 2021