 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning All-Terrain Locomotion for a Planetary Rover with Actively Articulated Suspension
Jun 05, 2026This paper presents ERNEST, a four-wheeled planetary rover concept equipped with a two-degree-of-freedom Active Gimbal Suspension that combines yaw and roll actuation to enable wheel reconfiguration, steering, and active load redistribution. A single neural network controller, trained to track a desired path across challenging terrain, fully unlocks the capabilities of this actuated suspension system for autonomous obstacle negotiation. A reinforcement learning framework is developed using the high-fidelity DARTS simulation engine, which combines rigid-contact dynamics and Bekker-Wong terramechanics, enabling the emergence of locomotion strategies adapted to loose-soil conditions. To obtain a single unified controller across heterogeneous terrains, a policy consolidation strategy merges the experience of terrain-specialized agents into one neural network, eliminating the need for explicit terrain classification and controller switching. The resulting controller operates on a combination of proprioceptive and exteroceptive feedback, including sparse stereo-derived terrain elevation, chassis attitude, joint states, and force-torque measurements. Zero-shot transfer to the physical rover is achieved through domain randomization, sensor noise injection, and model-to-real system identification. Experimental results demonstrate autonomous traversal of rock fields, a bump trap, a wheel-high step, sand ripples, and sandy slopes. On a 20° sandy slope, the learned controller reduces the cost of transport by 37% on dry sand despite the additional actuation, and achieves superior performance on wet sand where the passive suspension becomes completely immobilized.
Conv1D Energy-Aware Path Planner for Mobile Robots in Unstructured Environments
Apr 04, 2021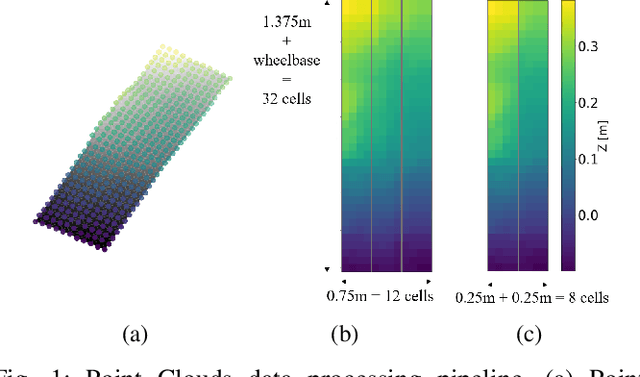
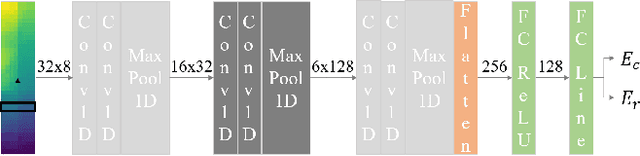
Driving energy consumption plays a major role in the navigation of mobile robots in challenging environments, especially if they are left to operate unattended under limited on-board power. This paper reports on first results of an energy-aware path planner, which can provide estimates of the driving energy consumption and energy recovery of a robot traversing complex uneven terrains. Energy is estimated over trajectories making use of a self-supervised learning approach, in which the robot autonomously learns how to correlate perceived terrain point clouds to energy consumption and recovery. A novel feature of the method is the use of 1D convolutional neural network to analyse the terrain sequentially in the same temporal order as it would be experienced by the robot when moving. The performance of the proposed approach is assessed in simulation over several digital terrain models collected from real natural scenarios, and is compared with a heuristic inclination-based energy model. We show evidence of the benefit of our method to increase the overall prediction r2 score by 66.8% and to reduce the driving energy consumption over planned paths by 5.5%.