 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Share and Hide Intentions using Information Regularization
Aug 06, 2018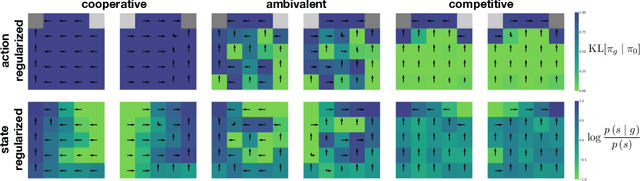
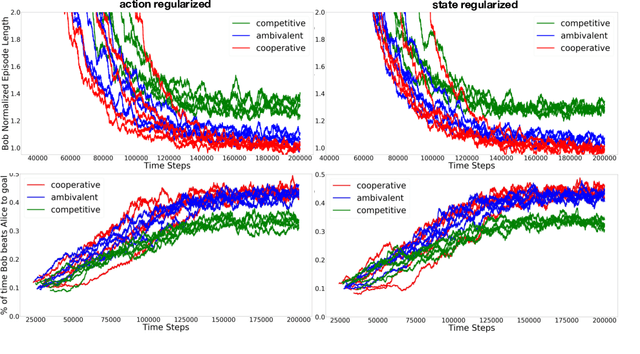
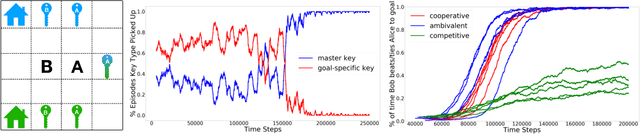
Learning to cooperate with friends and compete with foes is a key component of multi-agent reinforcement learning. Typically to do so, one requires access to either a model of or interaction with the other agent(s). Here we show how to learn effective strategies for cooperation and competition in an asymmetric information game with no such model or interaction. Our approach is to encourage an agent to reveal or hide their intentions using an information-theoretic regularizer. We consider both the mutual information between goal and action given state, as well as the mutual information between goal and state. We show how to stochastically optimize these regularizers in a way that is easy to integrate with policy gradient reinforcement learning. Finally, we demonstrate that cooperative (competitive) policies learned with our approach lead to more (less) reward for a second agent in two simple asymmetric information games.
Probing Physics Knowledge Using Tools from Developmental Psychology
Apr 03, 2018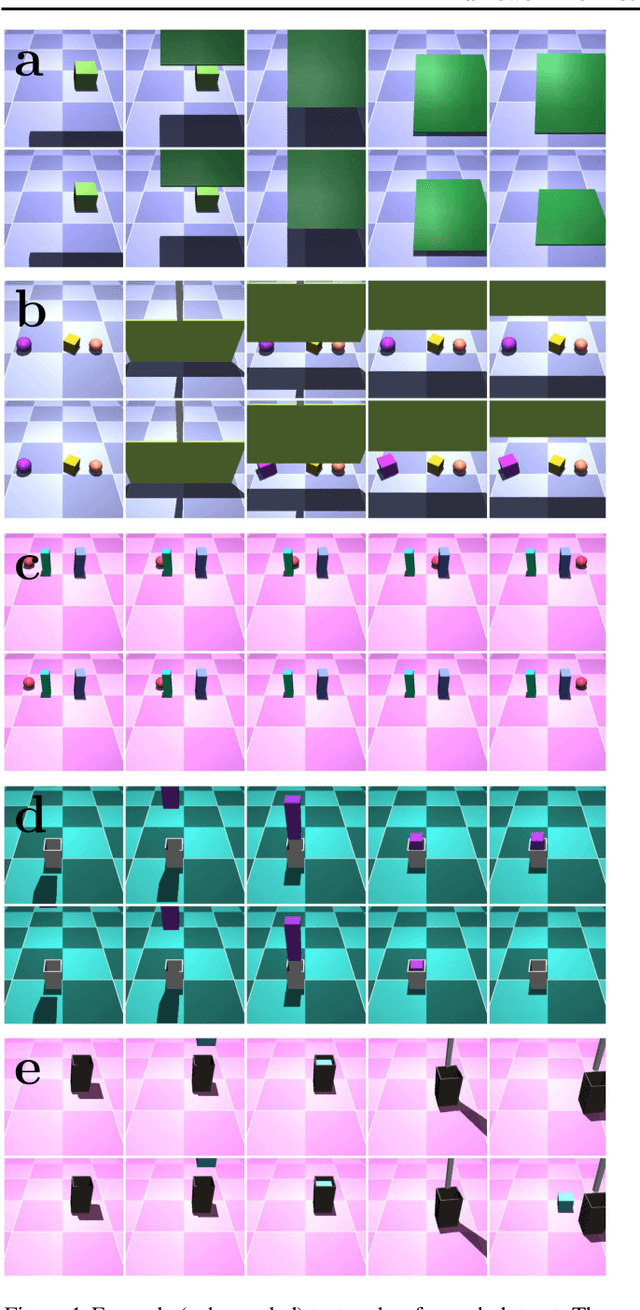
In order to build agents with a rich understanding of their environment, one key objective is to endow them with a grasp of intuitive physics; an ability to reason about three-dimensional objects, their dynamic interactions, and responses to forces. While some work on this problem has taken the approach of building in components such as ready-made physics engines, other research aims to extract general physical concepts directly from sensory data. In the latter case, one challenge that arises is evaluating the learning system. Research on intuitive physics knowledge in children has long employed a violation of expectations (VOE) method to assess children's mastery of specific physical concepts. We take the novel step of applying this method to artificial learning systems. In addition to introducing the VOE technique, we describe a set of probe datasets inspired by classic test stimuli from developmental psychology. We test a baseline deep learning system on this battery, as well as on a physics learning dataset ("IntPhys") recently posed by another research group. Our results show how the VOE technique may provide a useful tool for tracking physics knowledge in future research.
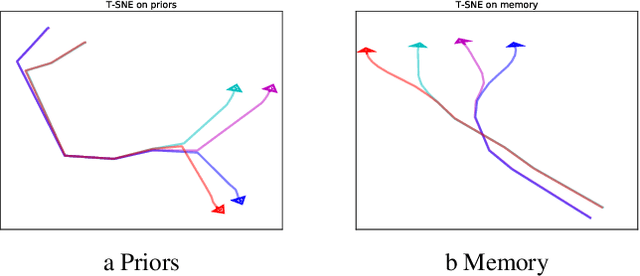
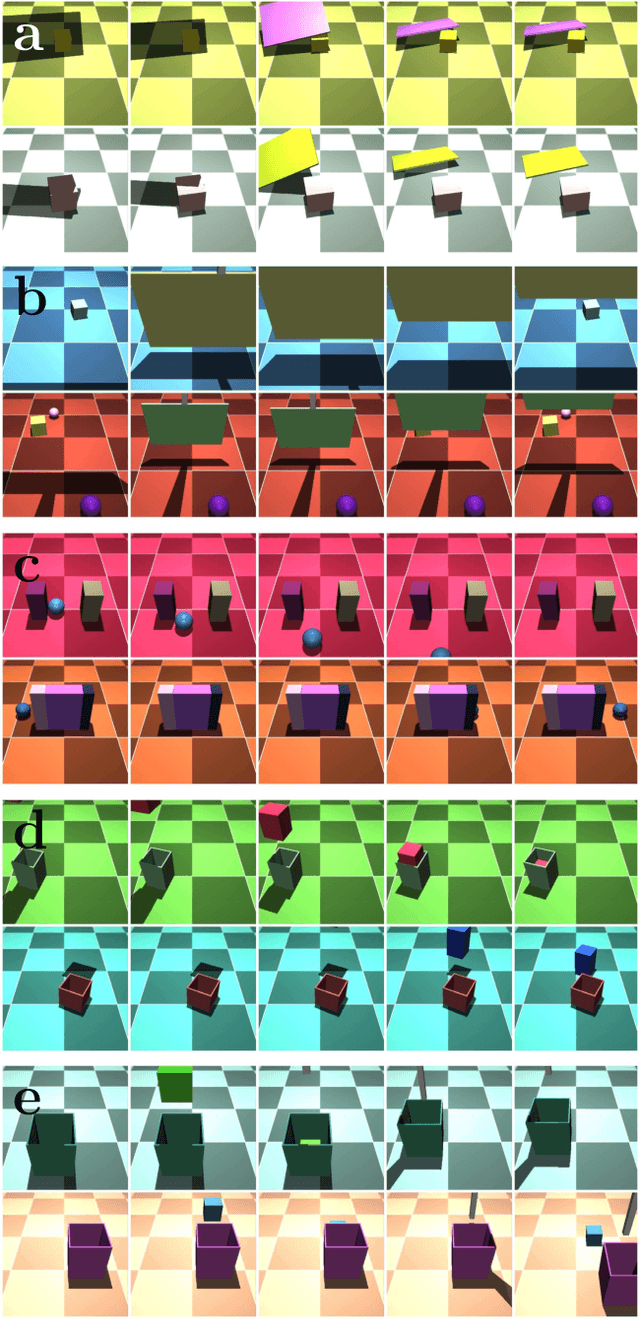
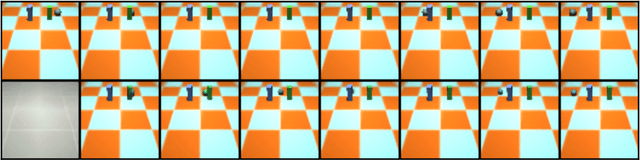
Unsupervised Predictive Memory in a Goal-Directed Agent
Mar 28, 2018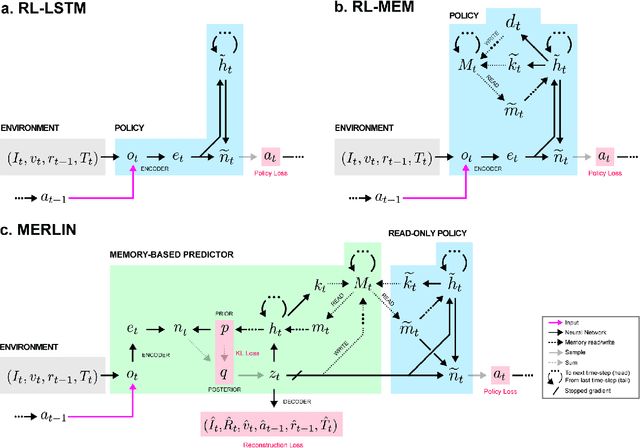
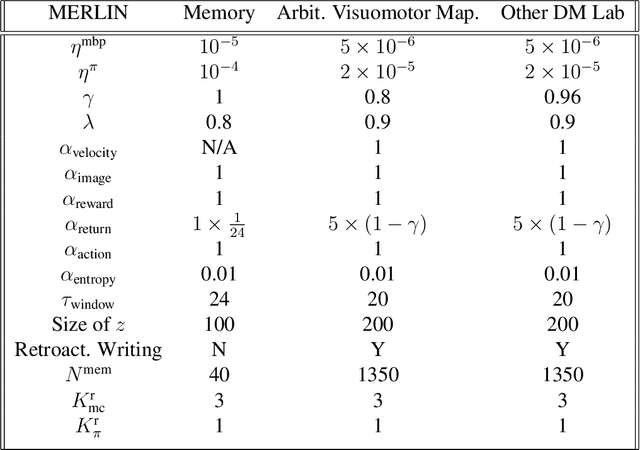
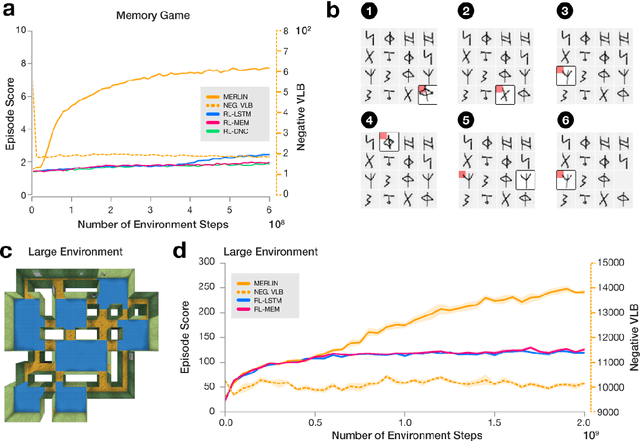
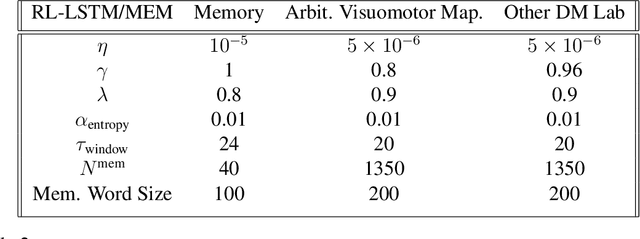
Animals execute goal-directed behaviours despite the limited range and scope of their sensors. To cope, they explore environments and store memories maintaining estimates of important information that is not presently available. Recently, progress has been made with artificial intelligence (AI) agents that learn to perform tasks from sensory input, even at a human level, by merging reinforcement learning (RL) algorithms with deep neural networks, and the excitement surrounding these results has led to the pursuit of related ideas as explanations of non-human animal learning. However, we demonstrate that contemporary RL algorithms struggle to solve simple tasks when enough information is concealed from the sensors of the agent, a property called "partial observability". An obvious requirement for handling partially observed tasks is access to extensive memory, but we show memory is not enough; it is critical that the right information be stored in the right format. We develop a model, the Memory, RL, and Inference Network (MERLIN), in which memory formation is guided by a process of predictive modeling. MERLIN facilitates the solution of tasks in 3D virtual reality environments for which partial observability is severe and memories must be maintained over long durations. Our model demonstrates a single learning agent architecture that can solve canonical behavioural tasks in psychology and neurobiology without strong simplifying assumptions about the dimensionality of sensory input or the duration of experiences.
Learning to Learn without Gradient Descent by Gradient Descent
Jun 12, 2017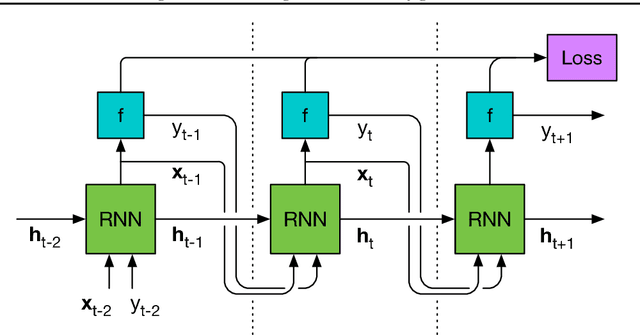
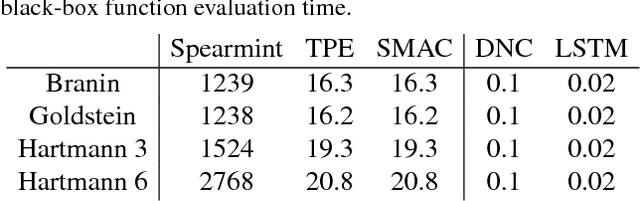
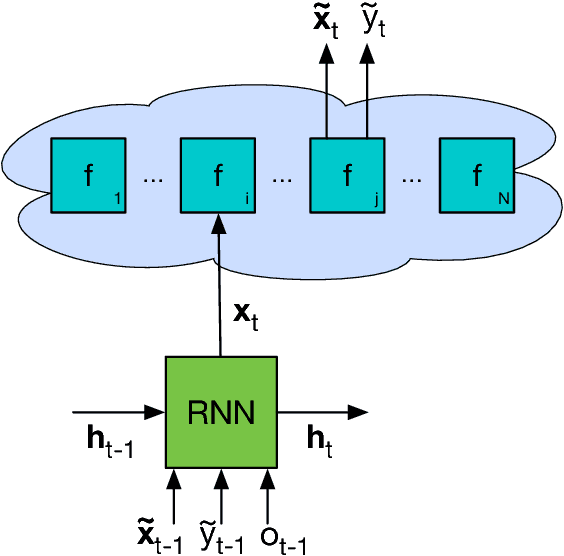
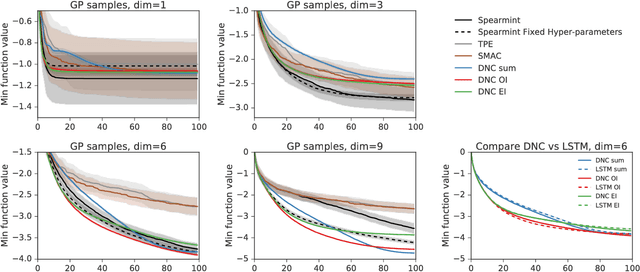
We learn recurrent neural network optimizers trained on simple synthetic functions by gradient descent. We show that these learned optimizers exhibit a remarkable degree of transfer in that they can be used to efficiently optimize a broad range of derivative-free black-box functions, including Gaussian process bandits, simple control objectives, global optimization benchmarks and hyper-parameter tuning tasks. Up to the training horizon, the learned optimizers learn to trade-off exploration and exploitation, and compare favourably with heavily engineered Bayesian optimization packages for hyper-parameter tuning.
Learning to reinforcement learn
Jan 23, 2017
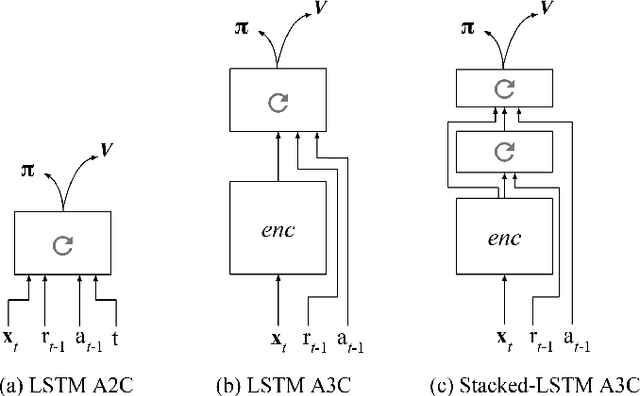
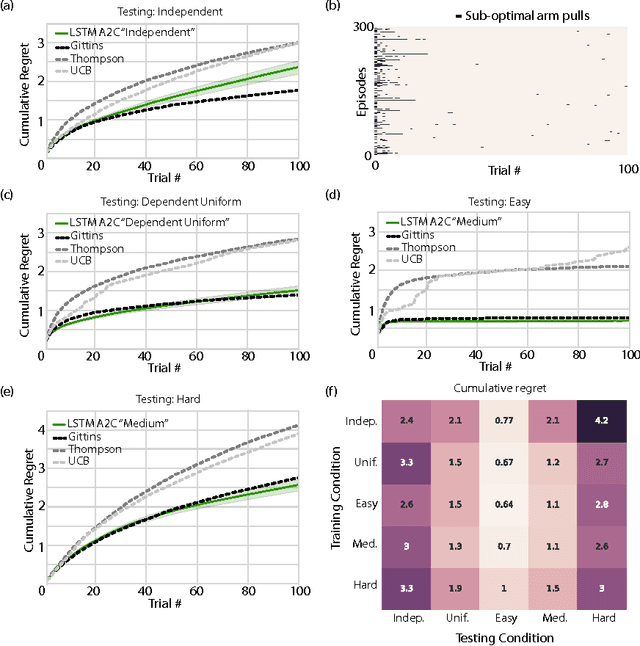
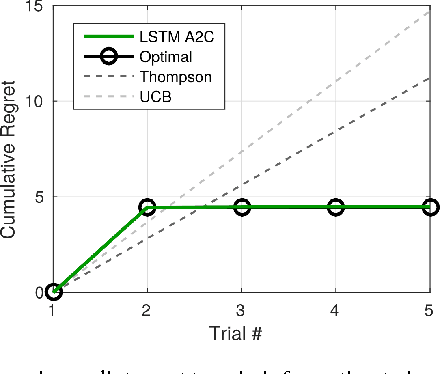
In recent years deep reinforcement learning (RL) systems have attained superhuman performance in a number of challenging task domains. However, a major limitation of such applications is their demand for massive amounts of training data. A critical present objective is thus to develop deep RL methods that can adapt rapidly to new tasks. In the present work we introduce a novel approach to this challenge, which we refer to as deep meta-reinforcement learning. Previous work has shown that recurrent networks can support meta-learning in a fully supervised context. We extend this approach to the RL setting. What emerges is a system that is trained using one RL algorithm, but whose recurrent dynamics implement a second, quite separate RL procedure. This second, learned RL algorithm can differ from the original one in arbitrary ways. Importantly, because it is learned, it is configured to exploit structure in the training domain. We unpack these points in a series of seven proof-of-concept experiments, each of which examines a key aspect of deep meta-RL. We consider prospects for extending and scaling up the approach, and also point out some potentially important implications for neuroscience.