 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiagnosing and Addressing Pitfalls in KG-RAG Datasets: Toward More Reliable Benchmarking
May 29, 2025



Knowledge Graph Question Answering (KGQA) systems rely on high-quality benchmarks to evaluate complex multi-hop reasoning. However, despite their widespread use, popular datasets such as WebQSP and CWQ suffer from critical quality issues, including inaccurate or incomplete ground-truth annotations, poorly constructed questions that are ambiguous, trivial, or unanswerable, and outdated or inconsistent knowledge. Through a manual audit of 16 popular KGQA datasets, including WebQSP and CWQ, we find that the average factual correctness rate is only 57 %. To address these issues, we introduce KGQAGen, an LLM-in-the-loop framework that systematically resolves these pitfalls. KGQAGen combines structured knowledge grounding, LLM-guided generation, and symbolic verification to produce challenging and verifiable QA instances. Using KGQAGen, we construct KGQAGen-10k, a ten-thousand scale benchmark grounded in Wikidata, and evaluate a diverse set of KG-RAG models. Experimental results demonstrate that even state-of-the-art systems struggle on this benchmark, highlighting its ability to expose limitations of existing models. Our findings advocate for more rigorous benchmark construction and position KGQAGen as a scalable framework for advancing KGQA evaluation.
Extending Graph Condensation to Multi-Label Datasets: A Benchmark Study
Dec 23, 2024



As graph data grows increasingly complicate, training graph neural networks (GNNs) on large-scale datasets presents significant challenges, including computational resource constraints, data redundancy, and transmission inefficiencies. While existing graph condensation techniques have shown promise in addressing these issues, they are predominantly designed for single-label datasets, where each node is associated with a single class label. However, many real-world applications, such as social network analysis and bioinformatics, involve multi-label graph datasets, where one node can have various related labels. To deal with this problem, we extends traditional graph condensation approaches to accommodate multi-label datasets by introducing modifications to synthetic dataset initialization and condensing optimization. Through experiments on eight real-world multi-label graph datasets, we prove the effectiveness of our method. In experiment, the GCond framework, combined with K-Center initialization and binary cross-entropy loss (BCELoss), achieves best performance in general. This benchmark for multi-label graph condensation not only enhances the scalability and efficiency of GNNs for multi-label graph data, but also offering substantial benefits for diverse real-world applications.
A Survey on Safe Multi-Modal Learning System
Feb 08, 2024
With the wide deployment of multimodal learning systems (MMLS) in real-world scenarios, safety concerns have become increasingly prominent. The absence of systematic research into their safety is a significant barrier to progress in this field. To bridge the gap, we present the first taxonomy for MMLS safety, identifying four essential pillars of these concerns. Leveraging this taxonomy, we conduct in-depth reviews for each pillar, highlighting key limitations based on the current state of development. Finally, we pinpoint unique challenges in MMLS safety and provide potential directions for future research.
A Survey on Graph Condensation
Feb 03, 2024Analytics on large-scale graphs have posed significant challenges to computational efficiency and resource requirements. Recently, Graph condensation (GC) has emerged as a solution to address challenges arising from the escalating volume of graph data. The motivation of GC is to reduce the scale of large graphs to smaller ones while preserving essential information for downstream tasks. For a better understanding of GC and to distinguish it from other related topics, we present a formal definition of GC and establish a taxonomy that systematically categorizes existing methods into three types based on its objective, and classify the formulations to generate the condensed graphs into two categories as modifying the original graphs or synthetic completely new ones. Moreover, our survey includes a comprehensive analysis of datasets and evaluation metrics in this field. Finally, we conclude by addressing challenges and limitations, outlining future directions, and offering concise guidelines to inspire future research in this field.
Key-frame Guided Network for Thyroid Nodule Recognition using Ultrasound Videos
Jun 30, 2022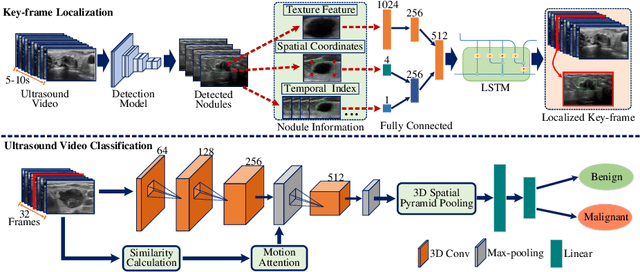
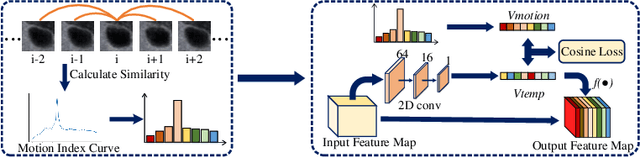
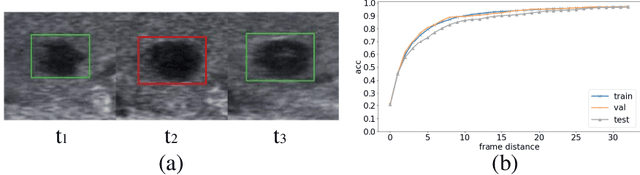
Ultrasound examination is widely used in the clinical diagnosis of thyroid nodules (benign/malignant). However, the accuracy relies heavily on radiologist experience. Although deep learning techniques have been investigated for thyroid nodules recognition. Current solutions are mainly based on static ultrasound images, with limited temporal information used and inconsistent with clinical diagnosis. This paper proposes a novel method for the automated recognition of thyroid nodules through an exhaustive exploration of ultrasound videos and key-frames. We first propose a detection-localization framework to automatically identify the clinical key-frame with a typical nodule in each ultrasound video. Based on the localized key-frame, we develop a key-frame guided video classification model for thyroid nodule recognition. Besides, we introduce a motion attention module to help the network focus on significant frames in an ultrasound video, which is consistent with clinical diagnosis. The proposed thyroid nodule recognition framework is validated on clinically collected ultrasound videos, demonstrating superior performance compared with other state-of-the-art methods.
Autonomous Last-mile Delivery Vehicles in Complex Traffic Environments
Jan 22, 2020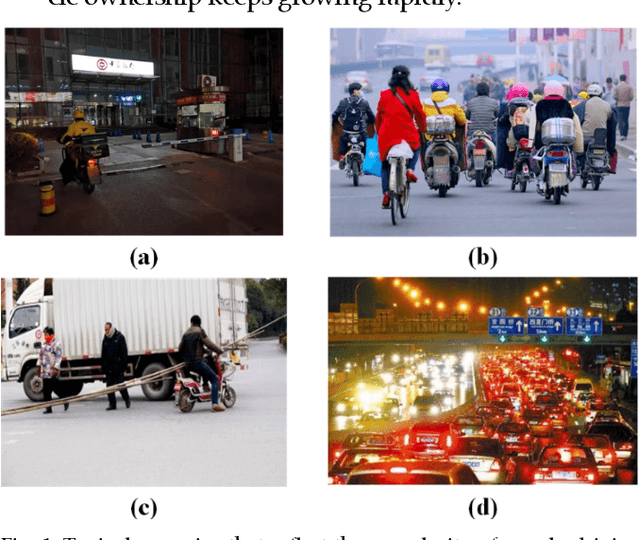
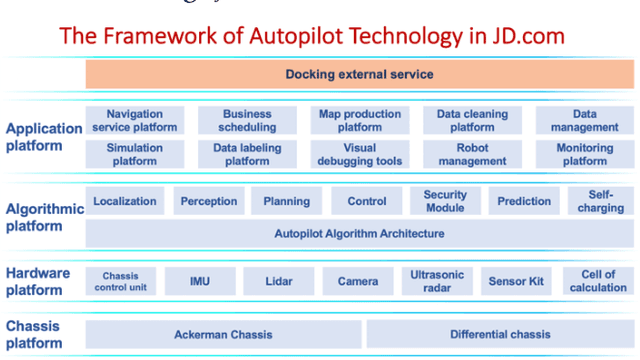
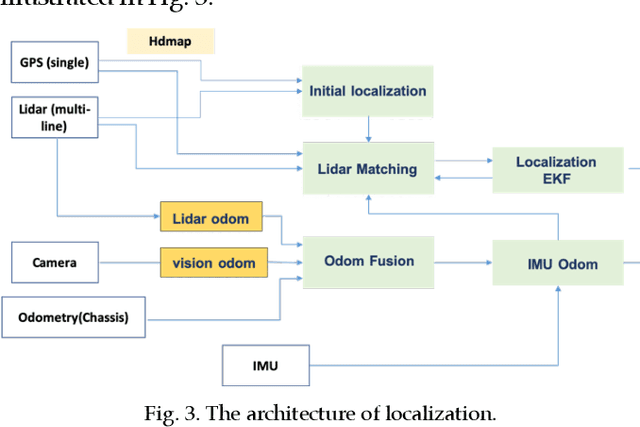
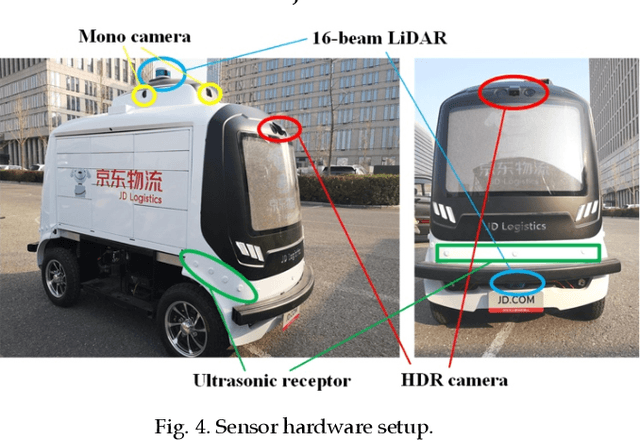
E-commerce has evolved with the digital technology revolution over the years. Last-mile logistics service contributes a significant part of the e-commerce experience. In contrast to the traditional last-mile logistics services, smart logistics service with autonomous driving technologies provides a promising solution to reduce the delivery cost and to improve efficiency. However, the traffic conditions in complex traffic environments, such as those in China, are more challenging compared to those in well-developed countries. Many types of moving objects (such as pedestrians, bicycles, electric bicycles, and motorcycles, etc.) share the road with autonomous vehicles, and their behaviors are not easy to track and predict. This paper introduces a technical solution from JD.com, a leading E-commerce company in China, to the autonomous last-mile delivery in complex traffic environments. Concretely, the methodologies in each module of our autonomous vehicles are presented, together with safety guarantee strategies. Up to this point, JD.com has deployed more than 300 self-driving vehicles for trial operations in tens of provinces of China, with an accumulated 715,819 miles and up to millions of on-road testing hours.
Baidu Apollo EM Motion Planner
Jul 20, 2018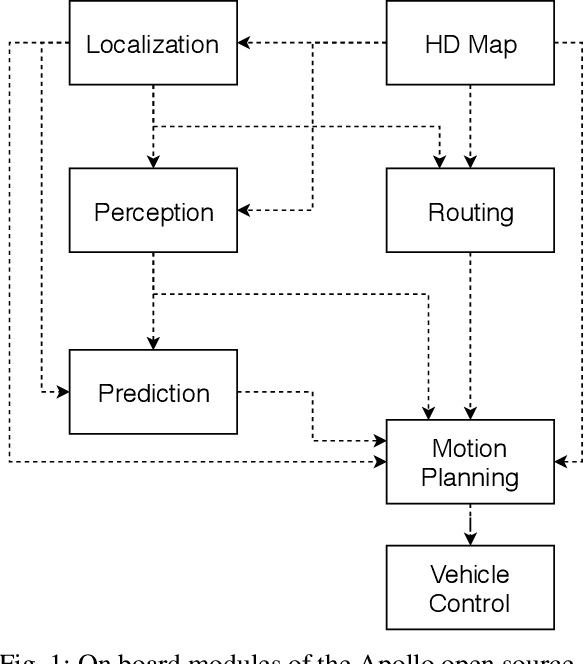
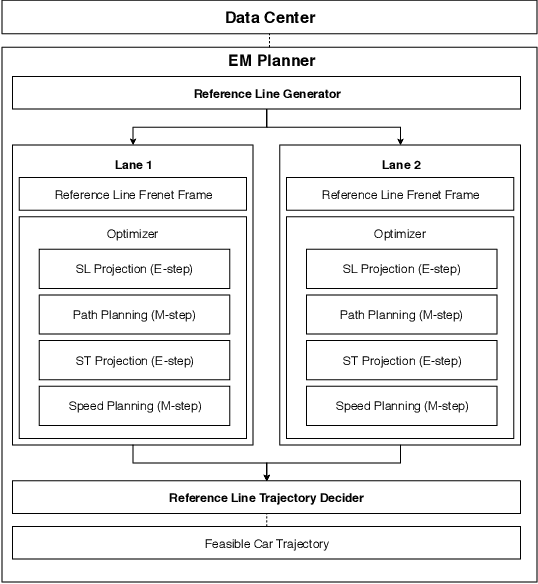
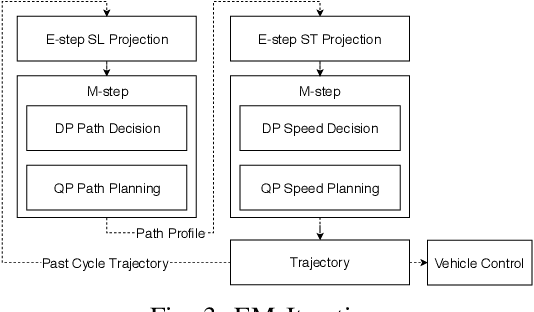

In this manuscript, we introduce a real-time motion planning system based on the Baidu Apollo (open source) autonomous driving platform. The developed system aims to address the industrial level-4 motion planning problem while considering safety, comfort and scalability. The system covers multilane and single-lane autonomous driving in a hierarchical manner: (1) The top layer of the system is a multilane strategy that handles lane-change scenarios by comparing lane-level trajectories computed in parallel. (2) Inside the lane-level trajectory generator, it iteratively solves path and speed optimization based on a Frenet frame. (3) For path and speed optimization, a combination of dynamic programming and spline-based quadratic programming is proposed to construct a scalable and easy-to-tune framework to handle traffic rules, obstacle decisions and smoothness simultaneously. The planner is scalable to both highway and lower-speed city driving scenarios. We also demonstrate the algorithm through scenario illustrations and on-road test results. The system described in this manuscript has been deployed to dozens of Baidu Apollo autonomous driving vehicles since Apollo v1.5 was announced in September 2017. As of May 16th, 2018, the system has been tested under 3,380 hours and approximately 68,000 kilometers (42,253 miles) of closed-loop autonomous driving under various urban scenarios. The algorithm described in this manuscript is available at https://github.com/ApolloAuto/apollo/tree/master/modules/planning.