 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Spiking Neural Network from Easy to Hard task
Sep 26, 2023



Starting with small and simple concepts, and gradually introducing complex and difficult concepts is the natural process of human learning. Spiking Neural Networks (SNNs) aim to mimic the way humans process information, but current SNNs models treat all samples equally, which does not align with the principles of human learning and overlooks the biological plausibility of SNNs. To address this, we propose a CL-SNN model that introduces Curriculum Learning(CL) into SNNs, making SNNs learn more like humans and providing higher biological interpretability. CL is a training strategy that advocates presenting easier data to models before gradually introducing more challenging data, mimicking the human learning process. We use a confidence-aware loss to measure and process the samples with different difficulty levels. By learning the confidence of different samples, the model reduces the contribution of difficult samples to parameter optimization automatically. We conducted experiments on static image datasets MNIST, Fashion-MNIST, CIFAR10, and neuromorphic datasets N-MNIST, CIFAR10-DVS, DVS-Gesture. The results are promising. To our best knowledge, this is the first proposal to enhance the biologically plausibility of SNNs by introducing CL.
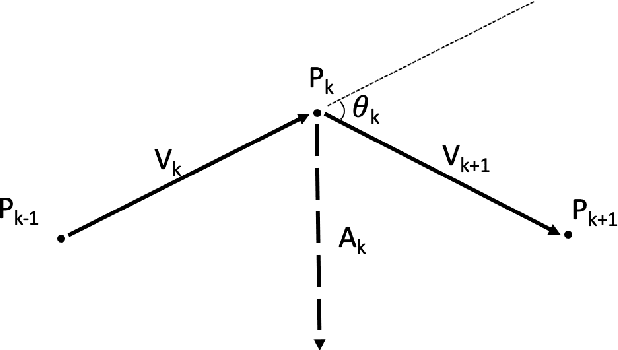
Optimal Trajectory Generation for Autonomous Vehicles Under Centripetal Acceleration Constraints for In-lane Driving Scenarios
Dec 03, 2021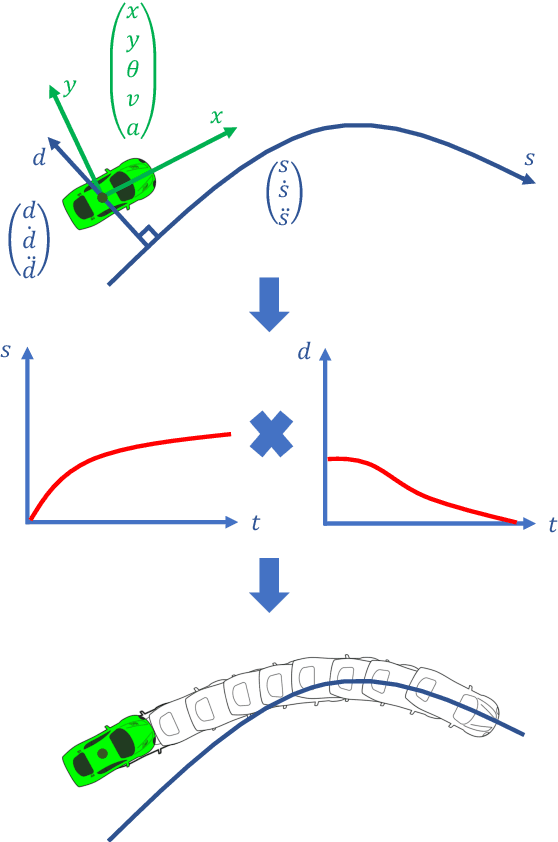
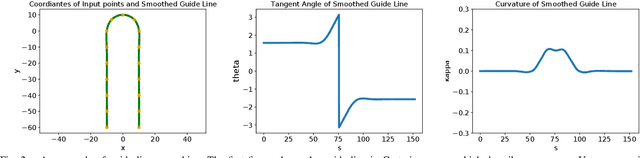
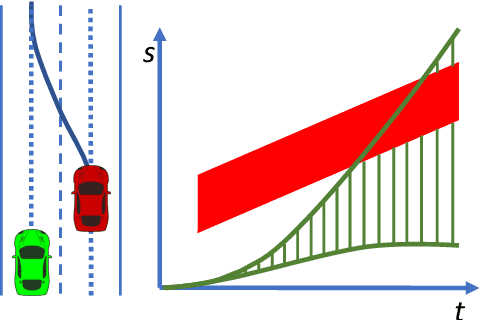
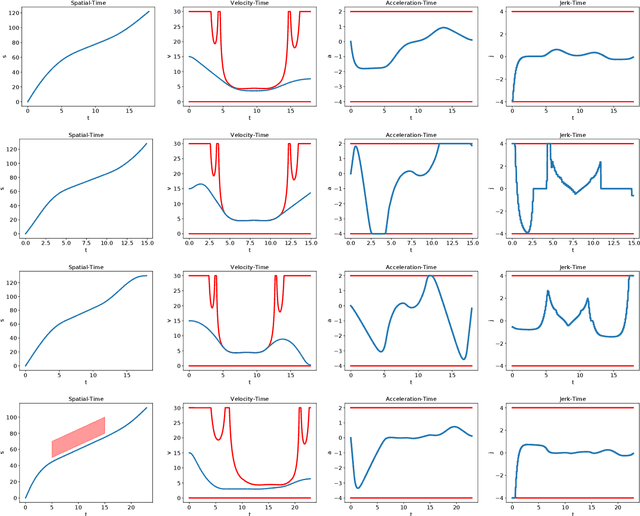
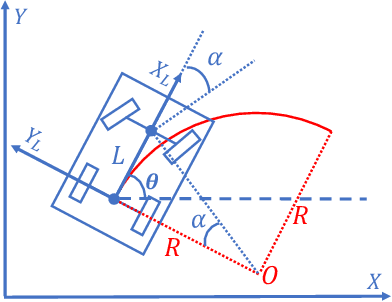
This paper presents a noval method that generates optimal trajectories for autonomous vehicles for in-lane driving scenarios. The method computes a trajectory using a two-phase optimization procedure. In the first phase, the optimization procedure generates a close-form driving guide line with differetiable curvatures. In the second phase, the procedure takes the driving guide line as input, and outputs dynamically feasible, jerk and time optimal trajectories for vehicles driving along the guide line. This method is especially useful for generating trajectories at curvy road where the vehicles need to apply frequent accelerations and decelerations to accommodate centripetal acceleration limits.
Optimal Vehicle Path Planning Using Quadratic Optimization for Baidu Apollo Open Platform
Dec 03, 2021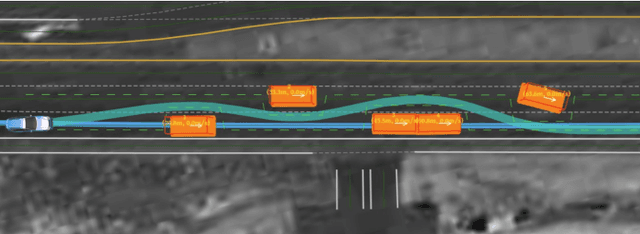

Path planning is a key component in motion planning for autonomous vehicles. A path specifies the geometrical shape that the vehicle will travel, thus, it is critical to safe and comfortable vehicle motions. For urban driving scenarios, autonomous vehicles need the ability to navigate in cluttered environment, e.g., roads partially blocked by a number of vehicles/obstacles on the sides. How to generate a kinematically feasible and smooth path, that can avoid collision in complex environment, makes path planning a challenging problem. In this paper, we present a novel quadratic programming approach that generates optimal paths with resolution-complete collision avoidance capability.
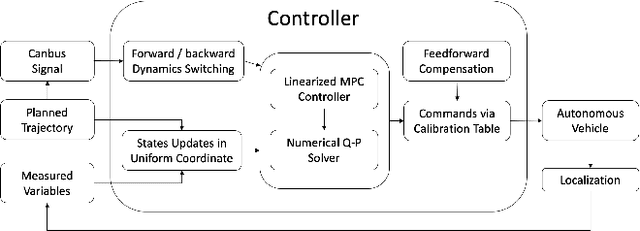
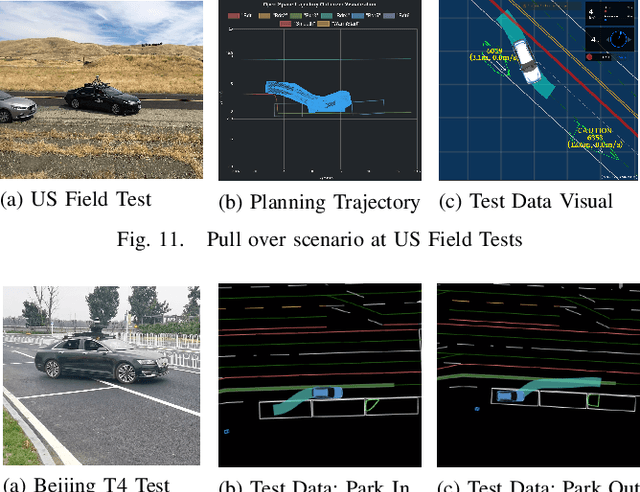
A Learning-Based Tune-Free Control Framework for Large Scale Autonomous Driving System Deployment
Nov 09, 2020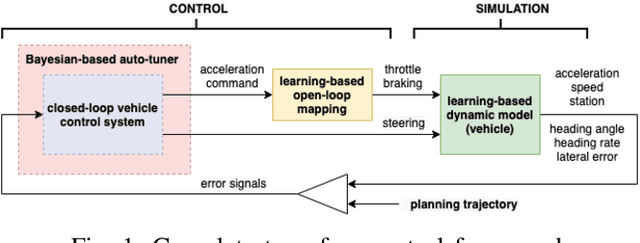
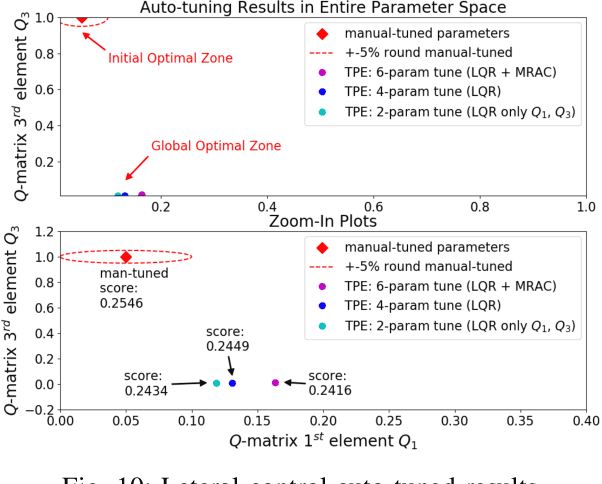
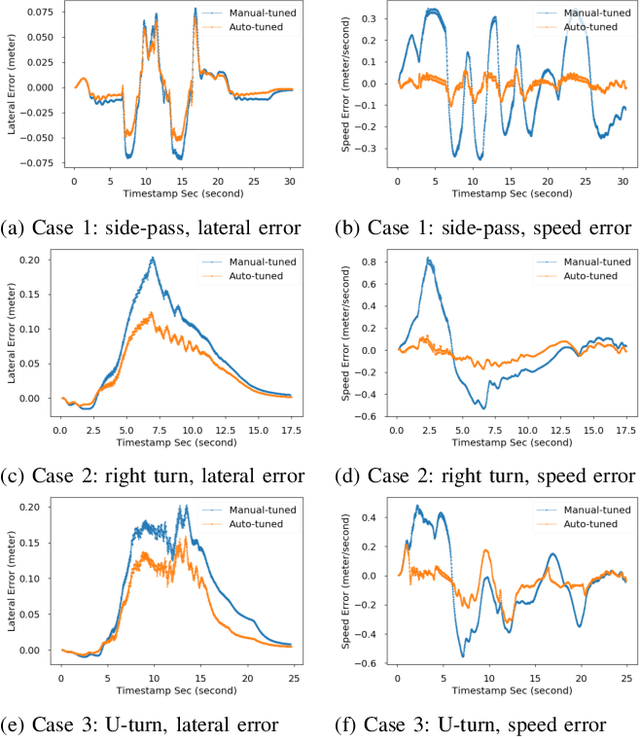
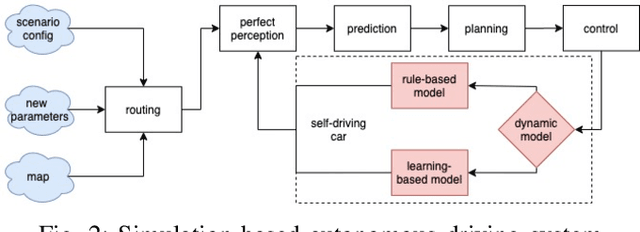
This paper presents the design of a tune-free (human-out-of-the-loop parameter tuning) control framework, aiming at accelerating large scale autonomous driving system deployed on various vehicles and driving environments. The framework consists of three machine-learning-based procedures, which jointly automate the control parameter tuning for autonomous driving, including: a learning-based dynamic modeling procedure, to enable the control-in-the-loop simulation with highly accurate vehicle dynamics for parameter tuning; a learning-based open-loop mapping procedure, to solve the feedforward control parameters tuning; and more significantly, a Bayesian-optimization-based closed-loop parameter tuning procedure, to automatically tune feedback control (PID, LQR, MRAC, MPC, etc.) parameters in simulation environment. The paper shows an improvement in control performance with a significant increase in parameter tuning efficiency, in both simulation and road tests. This framework has been validated on different vehicles in US and China.
TDR-OBCA: A Reliable Planner for Autonomous Driving in Free-Space Environment
Sep 23, 2020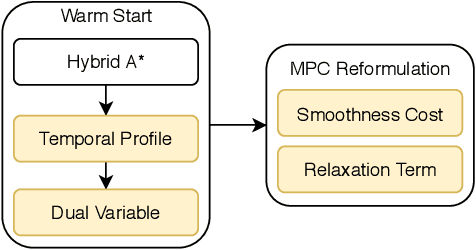
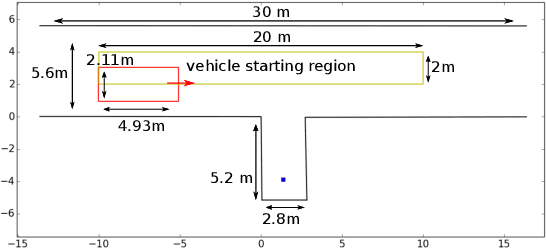
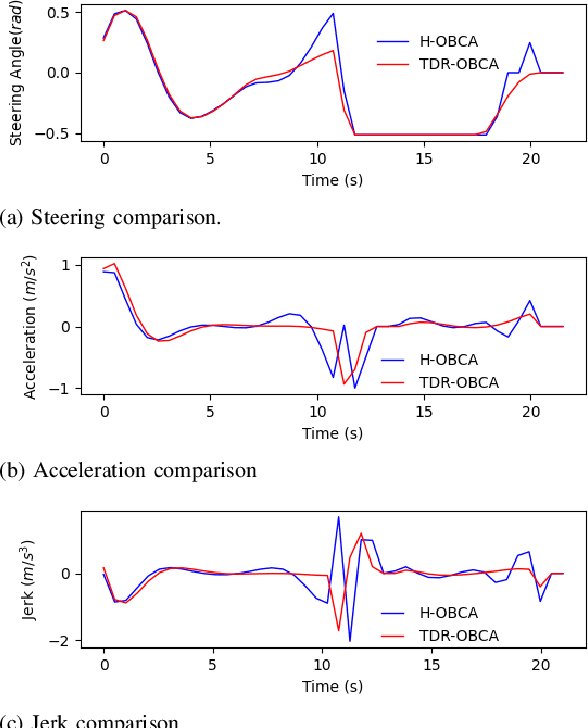
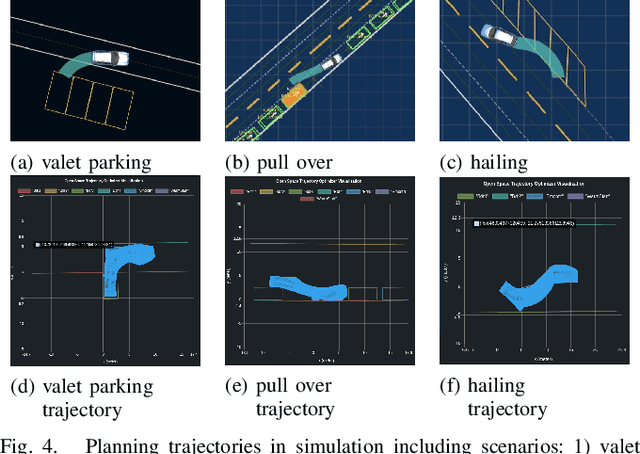
This paper presents an optimization-based collision avoidance trajectory generation method for autonomous driving in free-space environments, with enhanced robust-ness, driving comfort and efficiency. Starting from the hybrid optimization-based framework, we introduces two warm start methods, temporal and dual variable warm starts, to improve the efficiency. We also reformulates the problem to improve the robustness and efficiency. We name this new algorithm TDR-OBCA. With these changes, compared with original hybrid optimization we achieve a 96.67% failure rate decrease with respect to initial conditions, 13.53% increase in driving comforts and 3.33% to 44.82% increase in planner efficiency as obstacles number scales. We validate our results in hundreds of simulation scenarios and hundreds of hours of public road tests in both U.S. and China. Our source code is availableathttps://github.com/ApolloAuto/apollo.
DL-IAPS and PJSO: A Path/Speed Decoupled Trajectory Optimization and its Application in Autonomous Driving
Sep 23, 2020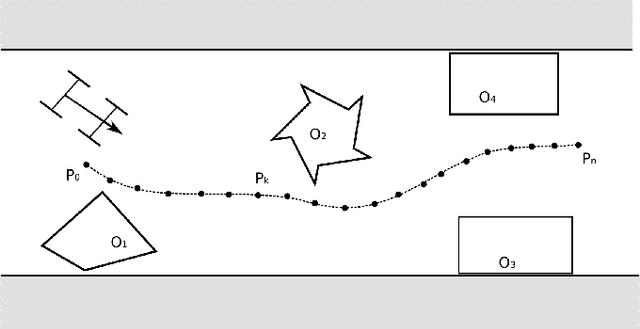
This paper presents a free space trajectory optimization algorithm of autonomous driving vehicle, which decouples the collision-free trajectory planning problem into a Dual-Loop Iterative Anchoring Path Smoothing (DL-IAPS) and a Piece-wise Jerk Speed Optimization (PJSO). The work leads to remarkable driving performance improvements including more precise collision avoidance, higher control feasibility and better driving comfort, as those are often hard to realize in other existing path/speed decoupled trajectory optimization methods. Our algorithm's efficiency, robustness and adaptiveness to complex driving scenarios have been validated by both simulations and real on-road tests.
Lane Attention: Predicting Vehicles' Moving Trajectories by Learning Their Attention over Lanes
Sep 29, 2019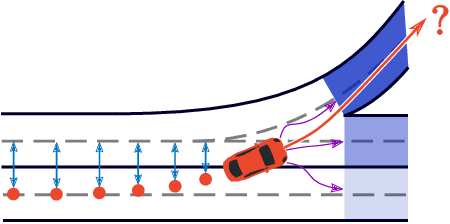
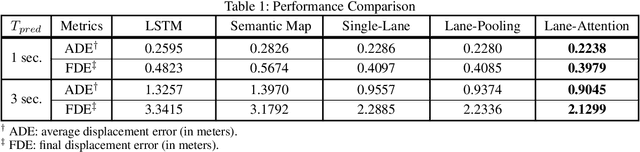
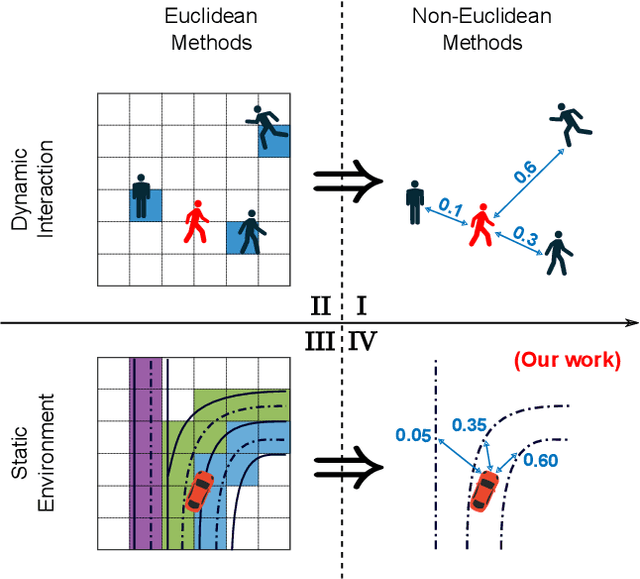
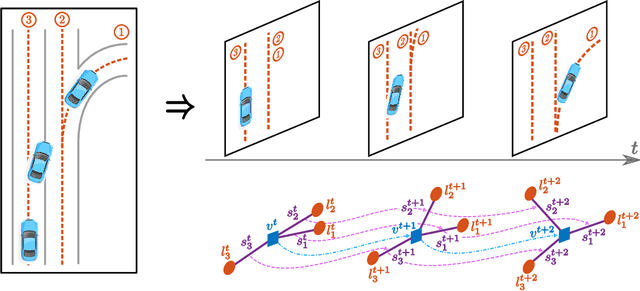
Accurately forecasting the future movements of surrounding vehicles is essential for safe and efficient operations of autonomous driving cars. This task is difficult because a vehicle's moving trajectory is greatly determined by its driver's intention, which is often hard to estimate. By leveraging attention mechanisms along with long short-term memory (LSTM) networks, this work learns the relation between a driver's intention and the vehicle's changing positions relative to road infrastructures, and uses it to guide the prediction. Different from other state-of-the-art solutions, our work treats the on-road lanes as non-Euclidean structures, unfolds the vehicle's moving history to form a spatio-temporal graph, and uses methods from Graph Neural Networks to solve the problem. Not only is our approach a pioneering attempt in using non-Euclidean methods to process static environmental features around a predicted object, our model also outperforms other state-of-the-art models in several metrics. The practicability and interpretability analysis of the model shows great potential for large-scale deployment in various autonomous driving systems in addition to our own.
Baidu Apollo EM Motion Planner
Jul 20, 2018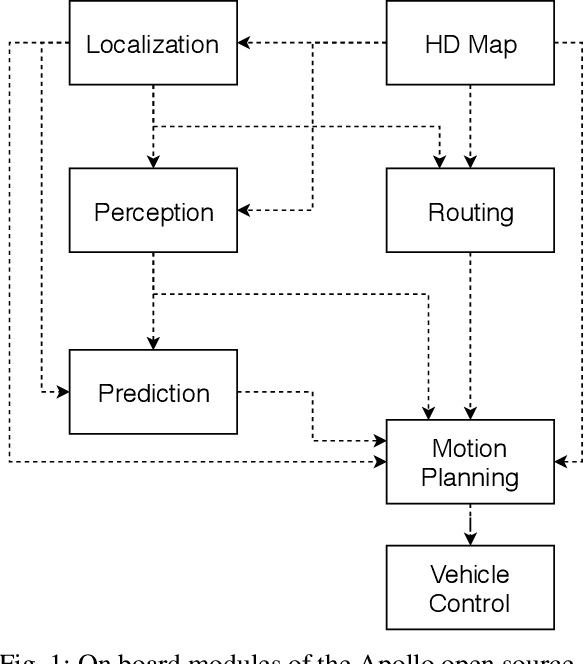
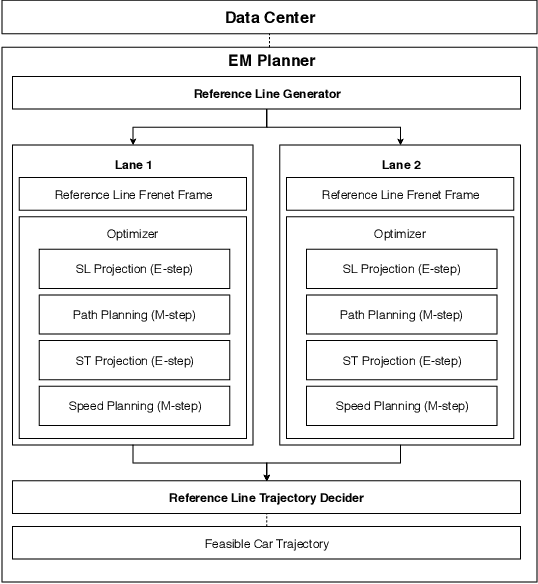
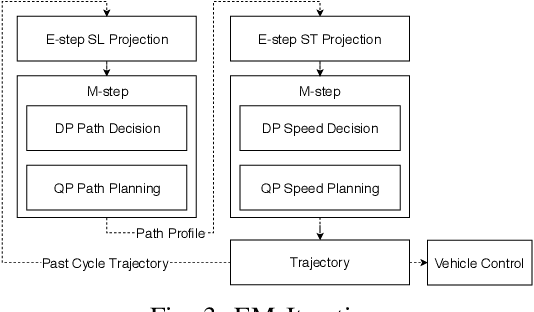

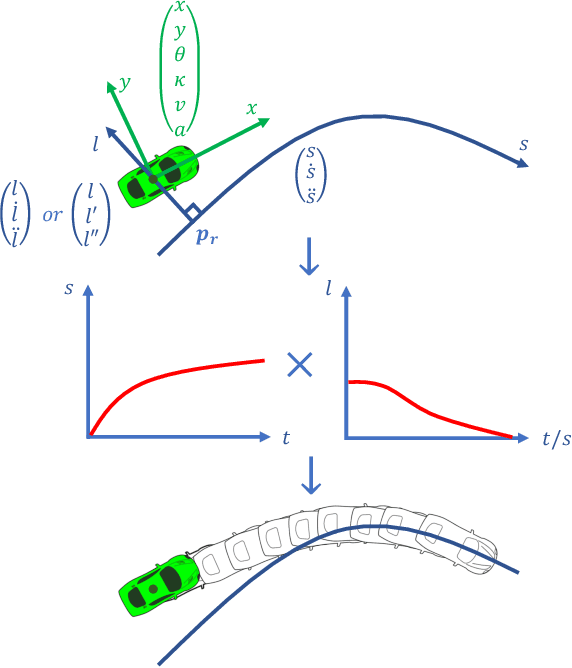
In this manuscript, we introduce a real-time motion planning system based on the Baidu Apollo (open source) autonomous driving platform. The developed system aims to address the industrial level-4 motion planning problem while considering safety, comfort and scalability. The system covers multilane and single-lane autonomous driving in a hierarchical manner: (1) The top layer of the system is a multilane strategy that handles lane-change scenarios by comparing lane-level trajectories computed in parallel. (2) Inside the lane-level trajectory generator, it iteratively solves path and speed optimization based on a Frenet frame. (3) For path and speed optimization, a combination of dynamic programming and spline-based quadratic programming is proposed to construct a scalable and easy-to-tune framework to handle traffic rules, obstacle decisions and smoothness simultaneously. The planner is scalable to both highway and lower-speed city driving scenarios. We also demonstrate the algorithm through scenario illustrations and on-road test results. The system described in this manuscript has been deployed to dozens of Baidu Apollo autonomous driving vehicles since Apollo v1.5 was announced in September 2017. As of May 16th, 2018, the system has been tested under 3,380 hours and approximately 68,000 kilometers (42,253 miles) of closed-loop autonomous driving under various urban scenarios. The algorithm described in this manuscript is available at https://github.com/ApolloAuto/apollo/tree/master/modules/planning.