 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePLGRIM: Hierarchical Value Learning for Large-scale Exploration in Unknown Environments
Feb 10, 2021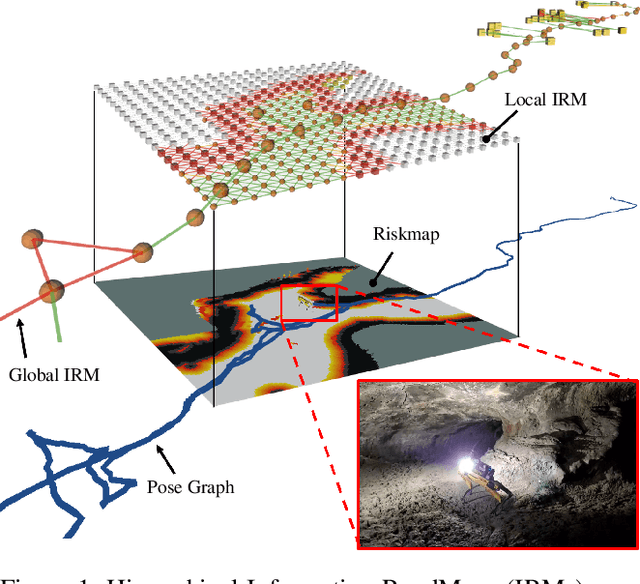
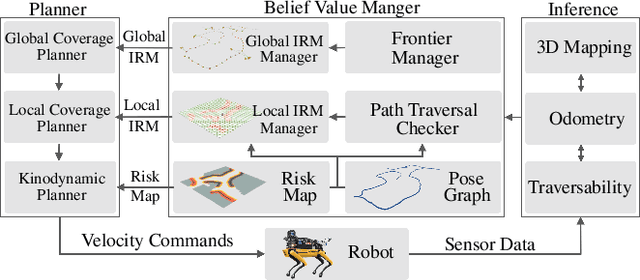
In order for a robot to explore an unknown environment autonomously, it must account for uncertainty in sensor measurements, hazard assessment, localization, and motion execution. Making decisions for maximal reward in a stochastic setting requires learning values and constructing policies over a belief space, i.e., probability distribution of the robot-world state. Value learning over belief spaces suffer from computational challenges in high-dimensional spaces, such as large spatial environments and long temporal horizons for exploration. At the same time, it should be adaptive and resilient to disturbances at run time in order to ensure the robot's safety, as required in many real-world applications. This work proposes a scalable value learning framework, PLGRIM (Probabilistic Local and Global Reasoning on Information roadMaps), that bridges the gap between (i) local, risk-aware resiliency and (ii) global, reward-seeking mission objectives. By leveraging hierarchical belief space planners with information-rich graph structures, PLGRIM can address large-scale exploration problems while providing locally near-optimal coverage plans. PLGRIM is a step toward enabling belief space planners on physical robots operating in unknown and complex environments. We validate our proposed framework with a high-fidelity dynamic simulation in diverse environments and with physical hardware, Boston Dynamics' Spot robot, in a lava tube.
Autonomous Off-road Navigation over Extreme Terrains with Perceptually-challenging Conditions
Jan 26, 2021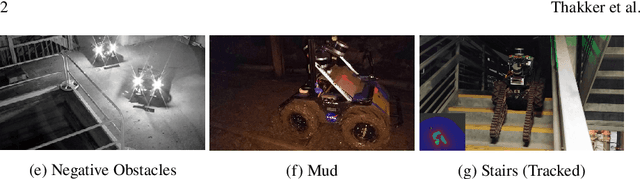
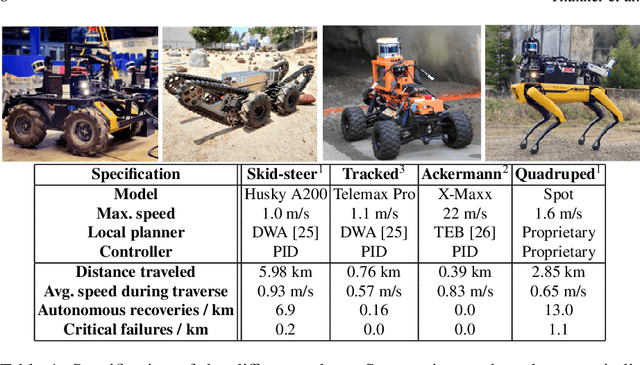
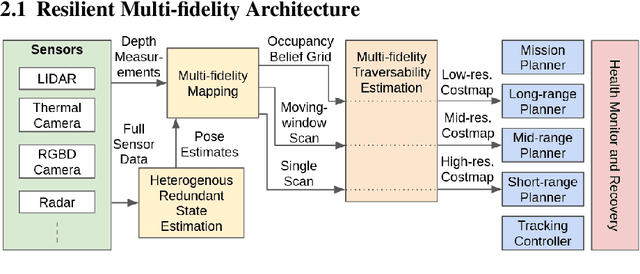
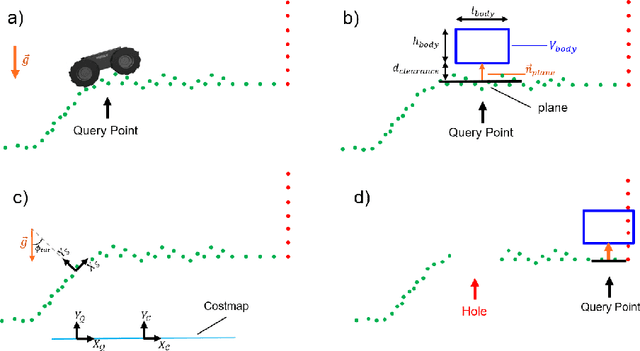
We propose a framework for resilient autonomous navigation in perceptually challenging unknown environments with mobility-stressing elements such as uneven surfaces with rocks and boulders, steep slopes, negative obstacles like cliffs and holes, and narrow passages. Environments are GPS-denied and perceptually-degraded with variable lighting from dark to lit and obscurants (dust, fog, smoke). Lack of prior maps and degraded communication eliminates the possibility of prior or off-board computation or operator intervention. This necessitates real-time on-board computation using noisy sensor data. To address these challenges, we propose a resilient architecture that exploits redundancy and heterogeneity in sensing modalities. Further resilience is achieved by triggering recovery behaviors upon failure. We propose a fast settling algorithm to generate robust multi-fidelity traversability estimates in real-time. The proposed approach was deployed on multiple physical systems including skid-steer and tracked robots, a high-speed RC car and legged robots, as a part of Team CoSTAR's effort to the DARPA Subterranean Challenge, where the team won 2nd and 1st place in the Tunnel and Urban Circuits, respectively.
Autonomous Spot: Long-Range Autonomous Exploration of Extreme Environments with Legged Locomotion
Nov 01, 2020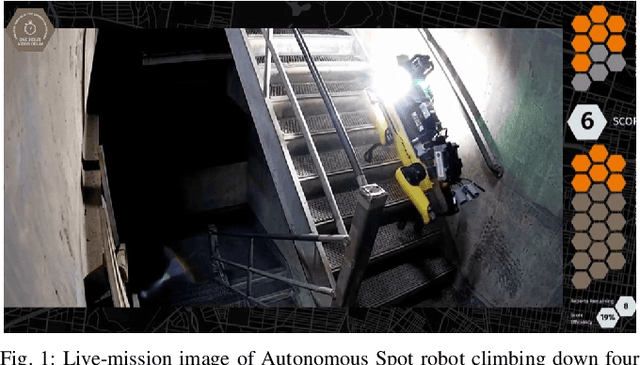
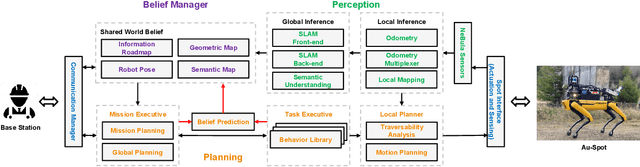
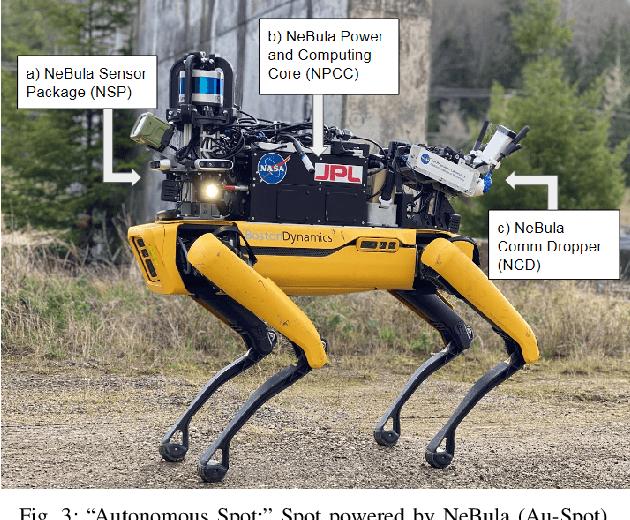
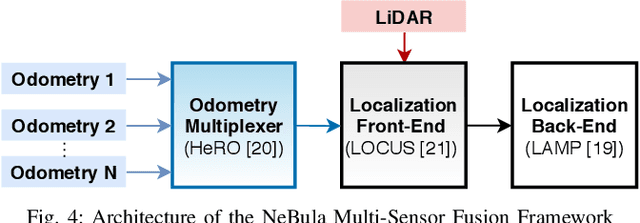
This paper serves as one of the first efforts to enable large-scale and long-duration autonomy using the Boston Dynamics Spot robot. Motivated by exploring extreme environments, particularly those involved in the DARPA Subterranean Challenge, this paper pushes the boundaries of the state-of-practice in enabling legged robotic systems to accomplish real-world complex missions in relevant scenarios. In particular, we discuss the behaviors and capabilities which emerge from the integration of the autonomy architecture NeBula (Networked Belief-aware Perceptual Autonomy) with next-generation mobility systems. We will discuss the hardware and software challenges, and solutions in mobility, perception, autonomy, and very briefly, wireless networking, as well as lessons learned and future directions. We demonstrate the performance of the proposed solutions on physical systems in real-world scenarios.
Where to Map? Iterative Rover-Copter Path Planning for Mars Exploration
Aug 17, 2020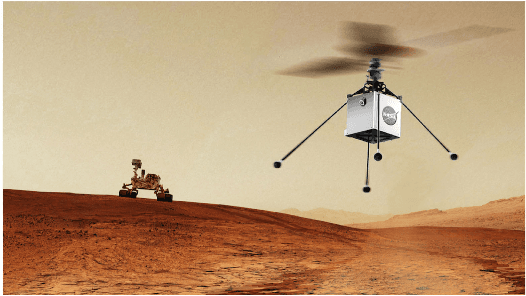

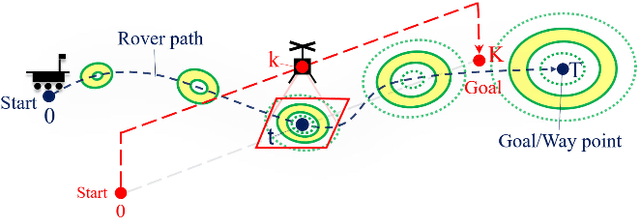
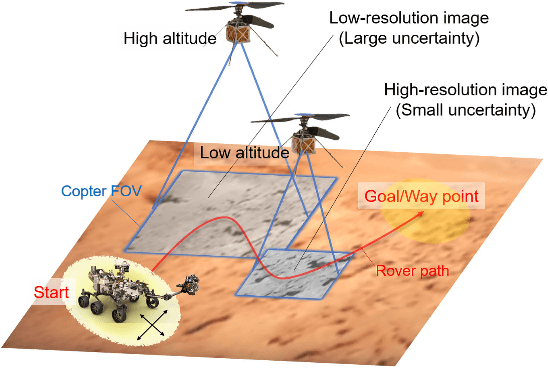
In addition to conventional ground rovers, the Mars 2020 mission will send a helicopter to Mars. The copter's high-resolution data helps the rover to identify small hazards such as steps and pointy rocks, as well as providing rich textual information useful to predict perception performance. In this paper, we consider a three-agent system composed of a Mars rover, copter, and orbiter. The objective is to provide good localization to the rover by selecting an optimal path that minimizes the localization uncertainty accumulation during the rover's traverse. To achieve this goal, we quantify the localizability as a goodness measure associated with the map, and conduct a joint-space search over rover's path and copter's perceptual actions given prior information from the orbiter. We jointly address where to map by the copter and where to drive by the rover using the proposed iterative copter-rover path planner. We conducted numerical simulations using the map of Mars 2020 landing site to demonstrate the effectiveness of the proposed planner.
* 8 pages, 7 figures
Perception-aware Autonomous Mast Motion Planning for Planetary Exploration Rovers
Dec 14, 2019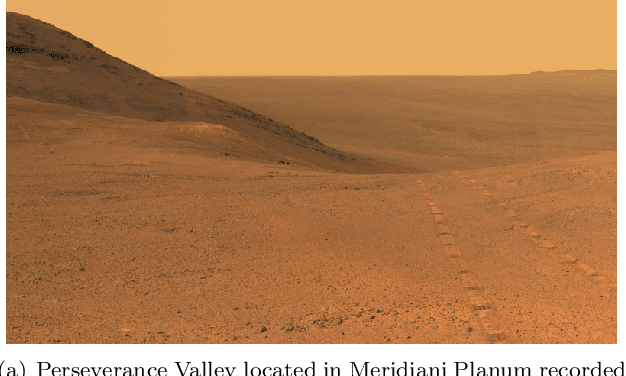
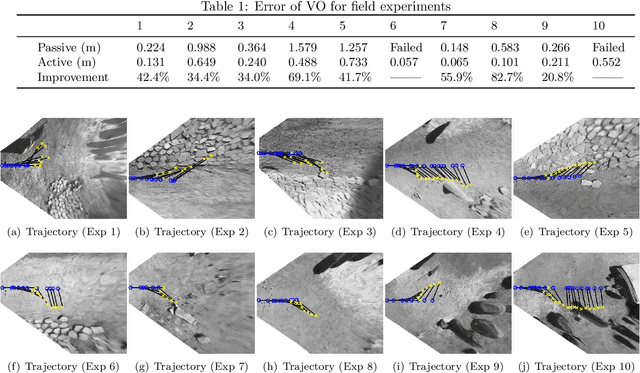
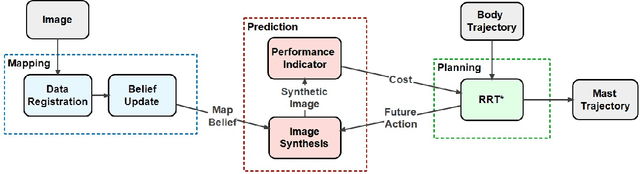
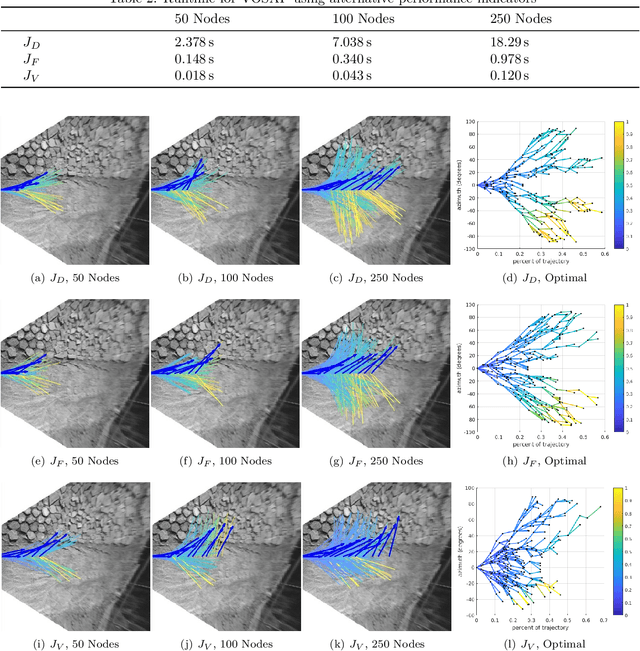
Highly accurate real-time localization is of fundamental importance for the safety and efficiency of planetary rovers exploring the surface of Mars. Mars rover operations rely on vision-based systems to avoid hazards as well as plan safe routes. However, vision-based systems operate on the assumption that sufficient visual texture is visible in the scene. This poses a challenge for vision-based navigation on Mars where regions lacking visual texture are prevalent. To overcome this, we make use of the ability of the rover to actively steer the visual sensor to improve fault tolerance and maximize the perception performance. This paper answers the question of where and when to look by presenting a method for predicting the sensor trajectory that maximizes the localization performance of the rover. This is accomplished by an online assessment of possible trajectories using synthetic, future camera views created from previous observations of the scene. The proposed trajectories are quantified and chosen based on the expected localization performance. In this work, we validate the proposed method in field experiments at the Jet Propulsion Laboratory (JPL) Mars Yard. Furthermore, multiple performance metrics are identified and evaluated for reducing the overall runtime of the algorithm. We show how actively steering the perception system increases the localization accuracy compared to traditional fixed-sensor configurations.
Fast Approximate Clearance Evaluation for Kinematically Constrained Articulated Suspension Systems
Jul 31, 2018
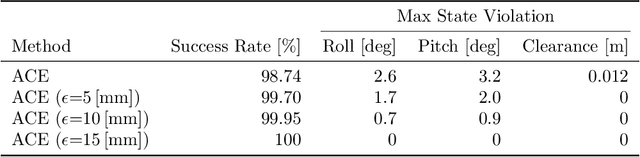
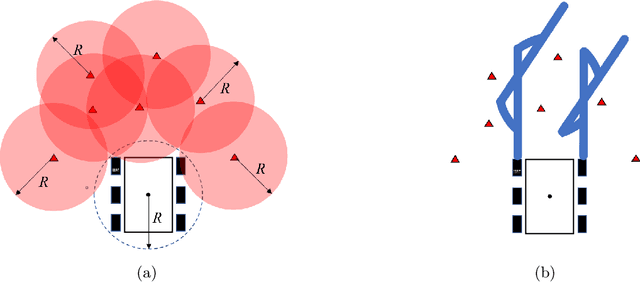
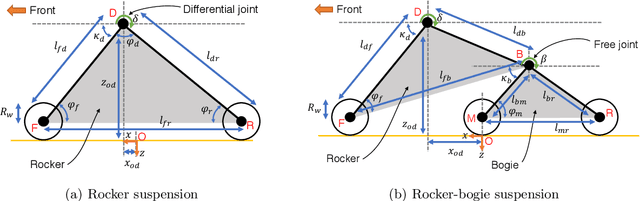
In this paper, we present a light-weight collision detection algorithm for motion planning of planetary rovers with articulated suspension systems. Extraterrestrial path planning is challenging due to the combination of terrain roughness and severe limitation in computational resources. Path planning on cluttered and/or uneven terrains requires repeated collision detection on all the candidate paths at a small interval. Solving the exact collision detection problem for articulated suspension systems requires simulating the vehicle settling on the terrain, which involves an inverse-kinematics problem with iterative nonlinear optimization under geometric constraints. However, such expensive computation is intractable for slow spacecraft computers, such as the RAD750 that is used by the Curiosity Mars rover and upcoming Mars 2020 rover. We propose the Approximate Clearance Evaluation (ACE) algorithm, which obtains conservative bounds on vehicle clearance, attitude, and suspension angles without iterative computation. It obtains those bounds by estimating the lowest and highest heights that each wheel may reach given the underlying terrain, and calculating the worst-case vehicle configuration associated with those extreme wheel heights. The bounds are guaranteed to be conservative, hence ensuring vehicle safety during autonomous navigation. ACE is planned to be used as part of the new onboard path planner of the Mars 2020 rover. This paper describes the algorithm in detail and validates our claim of conservatism and fast computation through experiments.