 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeJust in time Informed Trees: Manipulability-Aware Asymptotically Optimized Motion Planning
Jan 27, 2026In high-dimensional robotic path planning, traditional sampling-based methods often struggle to efficiently identify both feasible and optimal paths in complex, multi-obstacle environments. This challenge is intensified in robotic manipulators, where the risk of kinematic singularities and self-collisions further complicates motion efficiency and safety. To address these issues, we introduce the Just-in-Time Informed Trees (JIT*) algorithm, an enhancement over Effort Informed Trees (EIT*), designed to improve path planning through two core modules: the Just-in-Time module and the Motion Performance module. The Just-in-Time module includes "Just-in-Time Edge," which dynamically refines edge connectivity, and "Just-in-Time Sample," which adjusts sampling density in bottleneck areas to enable faster initial path discovery. The Motion Performance module balances manipulability and trajectory cost through dynamic switching, optimizing motion control while reducing the risk of singularities. Comparative analysis shows that JIT* consistently outperforms traditional sampling-based planners across $\mathbb{R}^4$ to $\mathbb{R}^{16}$ dimensions. Its effectiveness is further demonstrated in single-arm and dual-arm manipulation tasks, with experimental results available in a video at https://youtu.be/nL1BMHpMR7c.
Estimated Informed Anytime Search for Sampling-Based Planning via Adaptive Sampler
Aug 29, 2025Path planning in robotics often involves solving continuously valued, high-dimensional problems. Popular informed approaches include graph-based searches, such as A*, and sampling-based methods, such as Informed RRT*, which utilize informed set and anytime strategies to expedite path optimization incrementally. Informed sampling-based planners define informed sets as subsets of the problem domain based on the current best solution cost. However, when no solution is found, these planners re-sample and explore the entire configuration space, which is time-consuming and computationally expensive. This article introduces Multi-Informed Trees (MIT*), a novel planner that constructs estimated informed sets based on prior admissible solution costs before finding the initial solution, thereby accelerating the initial convergence rate. Moreover, MIT* employs an adaptive sampler that dynamically adjusts the sampling strategy based on the exploration process. Furthermore, MIT* utilizes length-related adaptive sparse collision checks to guide lazy reverse search. These features enhance path cost efficiency and computation times while ensuring high success rates in confined scenarios. Through a series of simulations and real-world experiments, it is confirmed that MIT* outperforms existing single-query, sampling-based planners for problems in R^4 to R^16 and has been successfully applied to real-world robot manipulation tasks. A video showcasing our experimental results is available at: https://youtu.be/30RsBIdexTU
Language-Enhanced Mobile Manipulation for Efficient Object Search in Indoor Environments
Aug 28, 2025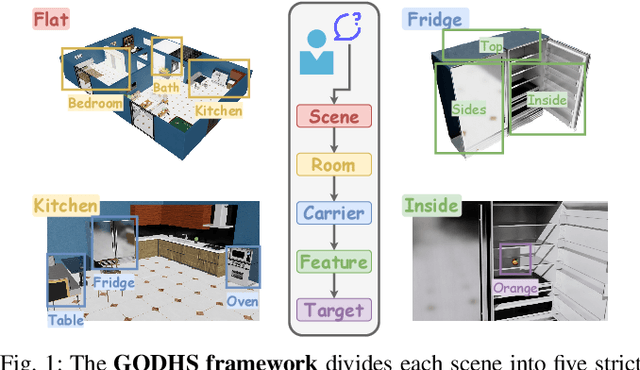
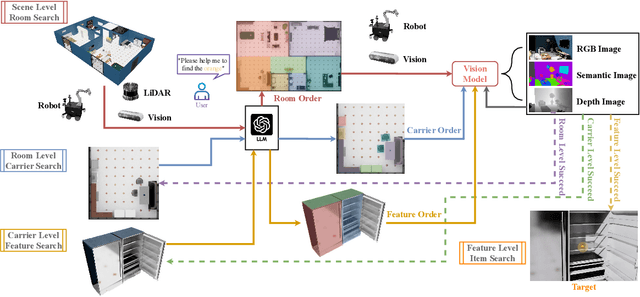
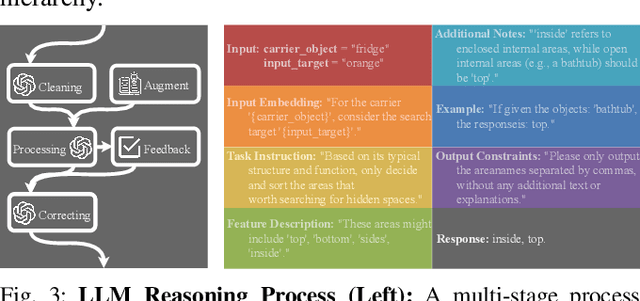

Enabling robots to efficiently search for and identify objects in complex, unstructured environments is critical for diverse applications ranging from household assistance to industrial automation. However, traditional scene representations typically capture only static semantics and lack interpretable contextual reasoning, limiting their ability to guide object search in completely unfamiliar settings. To address this challenge, we propose a language-enhanced hierarchical navigation framework that tightly integrates semantic perception and spatial reasoning. Our method, Goal-Oriented Dynamically Heuristic-Guided Hierarchical Search (GODHS), leverages large language models (LLMs) to infer scene semantics and guide the search process through a multi-level decision hierarchy. Reliability in reasoning is achieved through the use of structured prompts and logical constraints applied at each stage of the hierarchy. For the specific challenges of mobile manipulation, we introduce a heuristic-based motion planner that combines polar angle sorting with distance prioritization to efficiently generate exploration paths. Comprehensive evaluations in Isaac Sim demonstrate the feasibility of our framework, showing that GODHS can locate target objects with higher search efficiency compared to conventional, non-semantic search strategies. Website and Video are available at: https://drapandiger.github.io/GODHS
Genetic Informed Trees (GIT*): Path Planning via Reinforced Genetic Programming Heuristics
Aug 28, 2025



Optimal path planning involves finding a feasible state sequence between a start and a goal that optimizes an objective. This process relies on heuristic functions to guide the search direction. While a robust function can improve search efficiency and solution quality, current methods often overlook available environmental data and simplify the function structure due to the complexity of information relationships. This study introduces Genetic Informed Trees (GIT*), which improves upon Effort Informed Trees (EIT*) by integrating a wider array of environmental data, such as repulsive forces from obstacles and the dynamic importance of vertices, to refine heuristic functions for better guidance. Furthermore, we integrated reinforced genetic programming (RGP), which combines genetic programming with reward system feedback to mutate genotype-generative heuristic functions for GIT*. RGP leverages a multitude of data types, thereby improving computational efficiency and solution quality within a set timeframe. Comparative analyses demonstrate that GIT* surpasses existing single-query, sampling-based planners in problems ranging from R^4 to R^16 and was tested on a real-world mobile manipulation task. A video showcasing our experimental results is available at https://youtu.be/URjXbc_BiYg
Elliptical K-Nearest Neighbors -- Path Optimization via Coulomb's Law and Invalid Vertices in C-space Obstacles
Aug 27, 2025Path planning has long been an important and active research area in robotics. To address challenges in high-dimensional motion planning, this study introduces the Force Direction Informed Trees (FDIT*), a sampling-based planner designed to enhance speed and cost-effectiveness in pathfinding. FDIT* builds upon the state-of-the-art informed sampling planner, the Effort Informed Trees (EIT*), by capitalizing on often-overlooked information in invalid vertices. It incorporates principles of physical force, particularly Coulomb's law. This approach proposes the elliptical $k$-nearest neighbors search method, enabling fast convergence navigation and avoiding high solution cost or infeasible paths by exploring more problem-specific search-worthy areas. It demonstrates benefits in search efficiency and cost reduction, particularly in confined, high-dimensional environments. It can be viewed as an extension of nearest neighbors search techniques. Fusing invalid vertex data with physical dynamics facilitates force-direction-based search regions, resulting in an improved convergence rate to the optimum. FDIT* outperforms existing single-query, sampling-based planners on the tested problems in R^4 to R^16 and has been demonstrated on a real-world mobile manipulation task.
APT*: Asymptotically Optimal Motion Planning via Adaptively Prolated Elliptical R-Nearest Neighbors
Aug 27, 2025



Optimal path planning aims to determine a sequence of states from a start to a goal while accounting for planning objectives. Popular methods often integrate fixed batch sizes and neglect information on obstacles, which is not problem-specific. This study introduces Adaptively Prolated Trees (APT*), a novel sampling-based motion planner that extends based on Force Direction Informed Trees (FDIT*), integrating adaptive batch-sizing and elliptical $r$-nearest neighbor modules to dynamically modulate the path searching process based on environmental feedback. APT* adjusts batch sizes based on the hypervolume of the informed sets and considers vertices as electric charges that obey Coulomb's law to define virtual forces via neighbor samples, thereby refining the prolate nearest neighbor selection. These modules employ non-linear prolate methods to adaptively adjust the electric charges of vertices for force definition, thereby improving the convergence rate with lower solution costs. Comparative analyses show that APT* outperforms existing single-query sampling-based planners in dimensions from $\mathbb{R}^4$ to $\mathbb{R}^{16}$, and it was further validated through a real-world robot manipulation task. A video showcasing our experimental results is available at: https://youtu.be/gCcUr8LiEw4
Direction Informed Trees (DIT*): Optimal Path Planning via Direction Filter and Direction Cost Heuristic
Aug 26, 2025Optimal path planning requires finding a series of feasible states from the starting point to the goal to optimize objectives. Popular path planning algorithms, such as Effort Informed Trees (EIT*), employ effort heuristics to guide the search. Effective heuristics are accurate and computationally efficient, but achieving both can be challenging due to their conflicting nature. This paper proposes Direction Informed Trees (DIT*), a sampling-based planner that focuses on optimizing the search direction for each edge, resulting in goal bias during exploration. We define edges as generalized vectors and integrate similarity indexes to establish a directional filter that selects the nearest neighbors and estimates direction costs. The estimated direction cost heuristics are utilized in edge evaluation. This strategy allows the exploration to share directional information efficiently. DIT* convergence faster than existing single-query, sampling-based planners on tested problems in R^4 to R^16 and has been demonstrated in real-world environments with various planning tasks. A video showcasing our experimental results is available at: https://youtu.be/2SX6QT2NOek
TPT-Bench: A Large-Scale, Long-Term and Robot-Egocentric Dataset for Benchmarking Target Person Tracking
May 12, 2025Tracking a target person from robot-egocentric views is crucial for developing autonomous robots that provide continuous personalized assistance or collaboration in Human-Robot Interaction (HRI) and Embodied AI. However, most existing target person tracking (TPT) benchmarks are limited to controlled laboratory environments with few distractions, clean backgrounds, and short-term occlusions. In this paper, we introduce a large-scale dataset designed for TPT in crowded and unstructured environments, demonstrated through a robot-person following task. The dataset is collected by a human pushing a sensor-equipped cart while following a target person, capturing human-like following behavior and emphasizing long-term tracking challenges, including frequent occlusions and the need for re-identification from numerous pedestrians. It includes multi-modal data streams, including odometry, 3D LiDAR, IMU, panoptic, and RGB-D images, along with exhaustively annotated 2D bounding boxes of the target person across 35 sequences, both indoors and outdoors. Using this dataset and visual annotations, we perform extensive experiments with existing TPT methods, offering a thorough analysis of their limitations and suggesting future research directions.
RPF-Search: Field-based Search for Robot Person Following in Unknown Dynamic Environments
Mar 04, 2025Autonomous robot person-following (RPF) systems are crucial for personal assistance and security but suffer from target loss due to occlusions in dynamic, unknown environments. Current methods rely on pre-built maps and assume static environments, limiting their effectiveness in real-world settings. There is a critical gap in re-finding targets under topographic (e.g., walls, corners) and dynamic (e.g., moving pedestrians) occlusions. In this paper, we propose a novel heuristic-guided search framework that dynamically builds environmental maps while following the target and resolves various occlusions by prioritizing high-probability areas for locating the target. For topographic occlusions, a belief-guided search field is constructed and used to evaluate the likelihood of the target's presence, while for dynamic occlusions, a fluid-field approach allows the robot to adaptively follow or overtake moving occluders. Past motion cues and environmental observations refine the search decision over time. Our results demonstrate that the proposed method outperforms existing approaches in terms of search efficiency and success rates, both in simulations and real-world tests. Our target search method enhances the adaptability and reliability of RPF systems in unknown and dynamic environments to support their use in real-world applications. Our code, video, experimental results and appendix are available at https://medlartea.github.io/rpf-search/.
Motion Planning for Robotics: A Review for Sampling-based Planners
Oct 28, 2024



Recent advancements in robotics have transformed industries such as manufacturing, logistics, surgery, and planetary exploration. A key challenge is developing efficient motion planning algorithms that allow robots to navigate complex environments while avoiding collisions and optimizing metrics like path length, sweep area, execution time, and energy consumption. Among the available algorithms, sampling-based methods have gained the most traction in both research and industry due to their ability to handle complex environments, explore free space, and offer probabilistic completeness along with other formal guarantees. Despite their widespread application, significant challenges still remain. To advance future planning algorithms, it is essential to review the current state-of-the-art solutions and their limitations. In this context, this work aims to shed light on these challenges and assess the development and applicability of sampling-based methods. Furthermore, we aim to provide an in-depth analysis of the design and evaluation of ten of the most popular planners across various scenarios. Our findings highlight the strides made in sampling-based methods while underscoring persistent challenges. This work offers an overview of the important ongoing research in robotic motion planning.