 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDirection Informed Trees (DIT*): Optimal Path Planning via Direction Filter and Direction Cost Heuristic
Aug 26, 2025Optimal path planning requires finding a series of feasible states from the starting point to the goal to optimize objectives. Popular path planning algorithms, such as Effort Informed Trees (EIT*), employ effort heuristics to guide the search. Effective heuristics are accurate and computationally efficient, but achieving both can be challenging due to their conflicting nature. This paper proposes Direction Informed Trees (DIT*), a sampling-based planner that focuses on optimizing the search direction for each edge, resulting in goal bias during exploration. We define edges as generalized vectors and integrate similarity indexes to establish a directional filter that selects the nearest neighbors and estimates direction costs. The estimated direction cost heuristics are utilized in edge evaluation. This strategy allows the exploration to share directional information efficiently. DIT* convergence faster than existing single-query, sampling-based planners on tested problems in R^4 to R^16 and has been demonstrated in real-world environments with various planning tasks. A video showcasing our experimental results is available at: https://youtu.be/2SX6QT2NOek
Scene Graph Generation: A Comprehensive Survey
Jan 03, 2022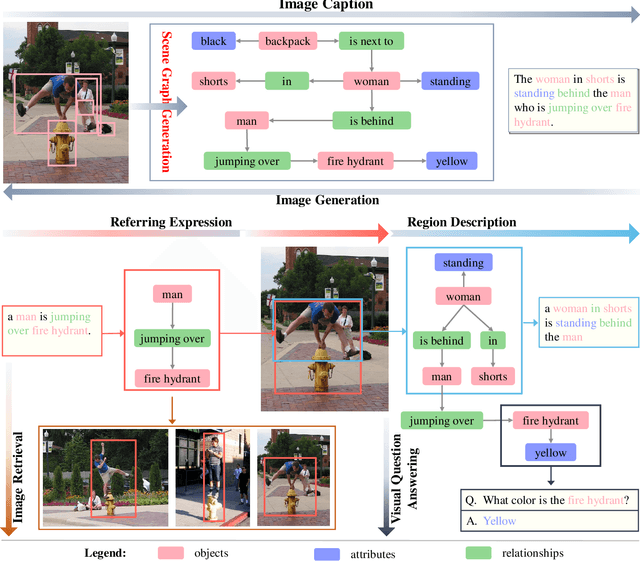
Deep learning techniques have led to remarkable breakthroughs in the field of generic object detection and have spawned a lot of scene-understanding tasks in recent years. Scene graph has been the focus of research because of its powerful semantic representation and applications to scene understanding. Scene Graph Generation (SGG) refers to the task of automatically mapping an image into a semantic structural scene graph, which requires the correct labeling of detected objects and their relationships. Although this is a challenging task, the community has proposed a lot of SGG approaches and achieved good results. In this paper, we provide a comprehensive survey of recent achievements in this field brought about by deep learning techniques. We review 138 representative works that cover different input modalities, and systematically summarize existing methods of image-based SGG from the perspective of feature extraction and fusion. We attempt to connect and systematize the existing visual relationship detection methods, to summarize, and interpret the mechanisms and the strategies of SGG in a comprehensive way. Finally, we finish this survey with deep discussions about current existing problems and future research directions. This survey will help readers to develop a better understanding of the current research status and ideas.