 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFingerViP: Learning Real-World Dexterous Manipulation with Fingertip Visual Perception
Apr 23, 2026The current practice of dexterous manipulation generally relies on a single wrist-mounted view, which is often occluded and limits performance on tasks requiring multi-view perception. In this work, we present FingerViP, a learning system that utilizes a visuomotor policy with fingertip visual perception for dexterous manipulation. Specifically, we design a vision-enhanced fingertip module with an embedded miniature camera and install the modules on each finger of a multi-fingered hand. The fingertip cameras substantially improve visual perception by providing comprehensive, multi-view feedback of both the hand and its surrounding environment. Building on the integrated fingertip modules, we develop a diffusion-based whole-body visuomotor policy conditioned on a third-view camera and multi-view fingertip vision, which effectively learns complex manipulation skills directly from human demonstrations. To improve view-proprioception alignment and contact awareness, each fingertip visual feature is augmented with its corresponding camera pose encoding and per-finger joint-current encoding. We validate the effectiveness of the multi-view fingertip vision and demonstrate the robustness and adaptability of FingerViP on various challenging real-world tasks, including pressing buttons inside a confined box, retrieving sticks from an unstable support, retrieving objects behind an occluding curtain, and performing long-horizon cabinet opening and object retrieval, achieving an overall success rate of 80.8%. All hardware designs and code will be fully open-sourced.
Shared Object Manipulation with a Team of Collaborative Quadrupeds
Oct 01, 2025



Utilizing teams of multiple robots is advantageous for handling bulky objects. Many related works focus on multi-manipulator systems, which are limited by workspace constraints. In this paper, we extend a classical hybrid motion-force controller to a team of legged manipulator systems, enabling collaborative loco-manipulation of rigid objects with a force-closed grasp. Our novel approach allows the robots to flexibly coordinate their movements, achieving efficient and stable object co-manipulation and transport, validated through extensive simulations and real-world experiments.
Vibration-Based Energy Metric for Restoring Needle Alignment in Autonomous Robotic Ultrasound
Aug 09, 2025Precise needle alignment is essential for percutaneous needle insertion in robotic ultrasound-guided procedures. However, inherent challenges such as speckle noise, needle-like artifacts, and low image resolution make robust needle detection difficult, particularly when visibility is reduced or lost. In this paper, we propose a method to restore needle alignment when the ultrasound imaging plane and the needle insertion plane are misaligned. Unlike many existing approaches that rely heavily on needle visibility in ultrasound images, our method uses a more robust feature by periodically vibrating the needle using a mechanical system. Specifically, we propose a vibration-based energy metric that remains effective even when the needle is fully out of plane. Using this metric, we develop a control strategy to reposition the ultrasound probe in response to misalignments between the imaging plane and the needle insertion plane in both translation and rotation. Experiments conducted on ex-vivo porcine tissue samples using a dual-arm robotic ultrasound-guided needle insertion system demonstrate the effectiveness of the proposed approach. The experimental results show the translational error of 0.41$\pm$0.27 mm and the rotational error of 0.51$\pm$0.19 degrees.
Manipulating Elasto-Plastic Objects With 3D Occupancy and Learning-Based Predictive Control
May 22, 2025Manipulating elasto-plastic objects remains a significant challenge due to severe self-occlusion, difficulties of representation, and complicated dynamics. This work proposes a novel framework for elasto-plastic object manipulation with a quasi-static assumption for motions, leveraging 3D occupancy to represent such objects, a learned dynamics model trained with 3D occupancy, and a learning-based predictive control algorithm to address these challenges effectively. We build a novel data collection platform to collect full spatial information and propose a pipeline for generating a 3D occupancy dataset. To infer the 3D occupancy during manipulation, an occupancy prediction network is trained with multiple RGB images supervised by the generated dataset. We design a deep neural network empowered by a 3D convolution neural network (CNN) and a graph neural network (GNN) to predict the complex deformation with the inferred 3D occupancy results. A learning-based predictive control algorithm is introduced to plan the robot actions, incorporating a novel shape-based action initialization module specifically designed to improve the planner efficiency. The proposed framework in this paper can successfully shape the elasto-plastic objects into a given goal shape and has been verified in various experiments both in simulation and the real world.
DOFS: A Real-world 3D Deformable Object Dataset with Full Spatial Information for Dynamics Model Learning
Oct 29, 2024



This work proposes DOFS, a pilot dataset of 3D deformable objects (DOs) (e.g., elasto-plastic objects) with full spatial information (i.e., top, side, and bottom information) using a novel and low-cost data collection platform with a transparent operating plane. The dataset consists of active manipulation action, multi-view RGB-D images, well-registered point clouds, 3D deformed mesh, and 3D occupancy with semantics, using a pinching strategy with a two-parallel-finger gripper. In addition, we trained a neural network with the down-sampled 3D occupancy and action as input to model the dynamics of an elasto-plastic object. Our dataset and all CADs of the data collection system will be released soon on our website.
Needle Segmentation Using GAN: Restoring Thin Instrument Visibility in Robotic Ultrasound
Jul 25, 2024



Ultrasound-guided percutaneous needle insertion is a standard procedure employed in both biopsy and ablation in clinical practices. However, due to the complex interaction between tissue and instrument, the needle may deviate from the in-plane view, resulting in a lack of close monitoring of the percutaneous needle. To address this challenge, we introduce a robot-assisted ultrasound (US) imaging system designed to seamlessly monitor the insertion process and autonomously restore the visibility of the inserted instrument when misalignment happens. To this end, the adversarial structure is presented to encourage the generation of segmentation masks that align consistently with the ground truth in high-order space. This study also systematically investigates the effects on segmentation performance by exploring various training loss functions and their combinations. When misalignment between the probe and the percutaneous needle is detected, the robot is triggered to perform transverse searching to optimize the positional and rotational adjustment to restore needle visibility. The experimental results on ex-vivo porcine samples demonstrate that the proposed method can precisely segment the percutaneous needle (with a tip error of $0.37\pm0.29mm$ and an angle error of $1.19\pm 0.29^{\circ}$). Furthermore, the needle appearance can be successfully restored under the repositioned probe pose in all 45 trials, with repositioning errors of $1.51\pm0.95mm$ and $1.25\pm0.79^{\circ}$. from latex to text with math symbols
Interactive Navigation in Environments with Traversable Obstacles Using Large Language and Vision-Language Models
Oct 13, 2023This paper proposes an interactive navigation framework by using large language and vision-language models, allowing robots to navigate in environments with traversable obstacles. We utilize the large language model (GPT-3.5) and the open-set Vision-language Model (Grounding DINO) to create an action-aware costmap to perform effective path planning without fine-tuning. With the large models, we can achieve an end-to-end system from textual instructions like "Can you pass through the curtains to deliver medicines to me?", to bounding boxes (e.g., curtains) with action-aware attributes. They can be used to segment LiDAR point clouds into two parts: traversable and untraversable parts, and then an action-aware costmap is constructed for generating a feasible path. The pre-trained large models have great generalization ability and do not require additional annotated data for training, allowing fast deployment in the interactive navigation tasks. We choose to use multiple traversable objects such as curtains and grasses for verification by instructing the robot to traverse them. Besides, traversing curtains in a medical scenario was tested. All experimental results demonstrated the proposed framework's effectiveness and adaptability to diverse environments.
Model-Free Large-Scale Cloth Spreading With Mobile Manipulation: Initial Feasibility Study
Aug 21, 2023



Cloth manipulation is common in domestic and service tasks, and most studies use fixed-base manipulators to manipulate objects whose sizes are relatively small with respect to the manipulators' workspace, such as towels, shirts, and rags. In contrast, manipulation of large-scale cloth, such as bed making and tablecloth spreading, poses additional challenges of reachability and manipulation control. To address them, this paper presents a novel framework to spread large-scale cloth, with a single-arm mobile manipulator that can solve the reachability issue, for an initial feasibility study. On the manipulation control side, without modeling highly deformable cloth, a vision-based manipulation control scheme is applied and based on an online-update Jacobian matrix mapping from selected feature points to the end-effector motion. To coordinate the control of the manipulator and mobile platform, Behavior Trees (BTs) are used because of their modularity. Finally, experiments are conducted, including validation of the model-free manipulation control for cloth spreading in different conditions and the large-scale cloth spreading framework. The experimental results demonstrate the large-scale cloth spreading task feasibility with a single-arm mobile manipulator and the model-free deformation controller.
* 6 pages, 6 figures, submit to CASE2023
Towards Exact Interaction Force Control for Underactuated Quadrupedal Systems with Orthogonal Projection and Quadratic Programming
Oct 19, 2022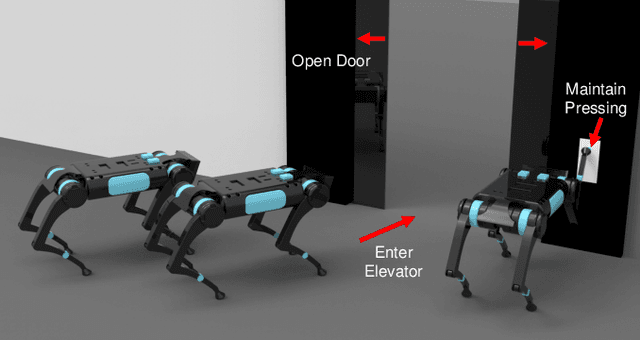
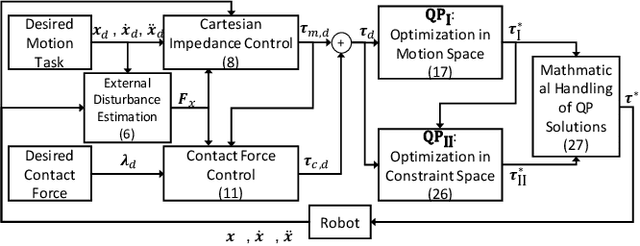
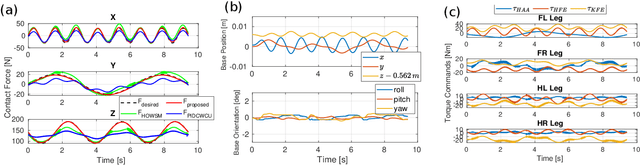
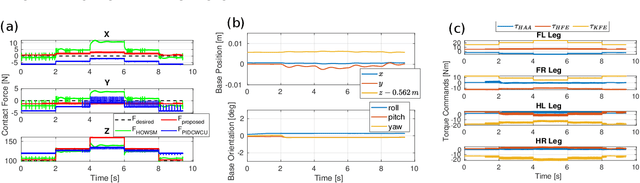
Projected Inverse Dynamics Control (PIDC) is commonly used in robots subject to contact, especially in quadrupedal systems. Many methods based on such dynamics have been developed for quadrupedal locomotion tasks, and only a few works studied simple interactions between the robot and environment, such as pressing an E-stop button. To facilitate the interaction requiring exact force control for safety, we propose a novel interaction force control scheme for underactuated quadrupedal systems relying on projection techniques and Quadratic Programming (QP). This algorithm allows the robot to apply a desired interaction force to the environment without using force sensors while satisfying physical constraints and inducing minimal base motion. Unlike previous projection-based methods, the QP design uses two selection matrices in its hierarchical structure, facilitating the decoupling between force and motion control. The proposed algorithm is verified with a quadrupedal robot in a high-fidelity simulator. Compared to the QP designs without the strategy of using two selection matrices and the PIDC method for contact force control, our method provided more accurate contact force tracking performance with minimal base movement, paving the way to approach the exact interaction force control for underactuated quadrupedal systems.
Learning Deep Nets for Gravitational Dynamics with Unknown Disturbance through Physical Knowledge Distillation: Initial Feasibility Study
Oct 04, 2022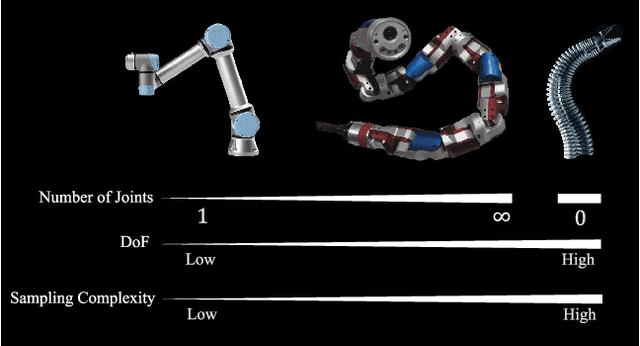
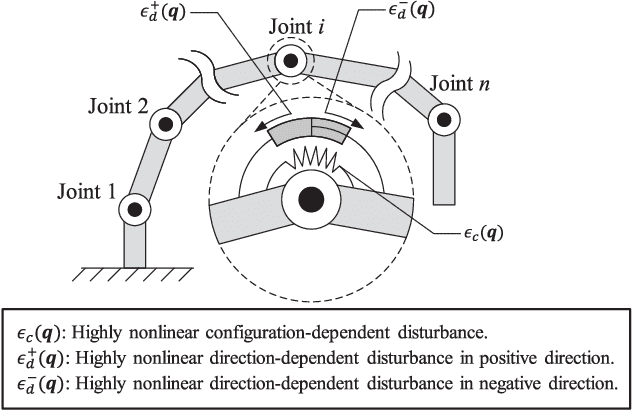
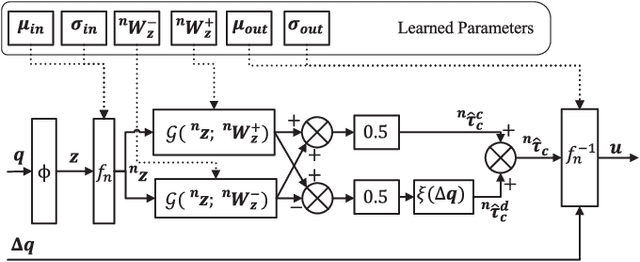
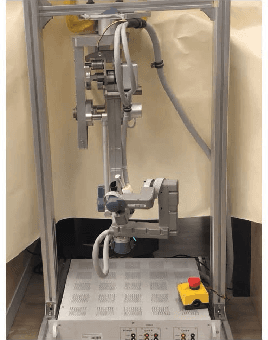
Learning high-performance deep neural networks for dynamic modeling of high Degree-Of-Freedom (DOF) robots remains challenging due to the sampling complexity. Typical unknown system disturbance caused by unmodeled dynamics (such as internal compliance, cables) further exacerbates the problem. In this paper, a novel framework characterized by both high data efficiency and disturbance-adapting capability is proposed to address the problem of modeling gravitational dynamics using deep nets in feedforward gravity compensation control for high-DOF master manipulators with unknown disturbance. In particular, Feedforward Deep Neural Networks (FDNNs) are learned from both prior knowledge of an existing analytical model and observation of the robot system by Knowledge Distillation (KD). Through extensive experiments in high-DOF master manipulators with significant disturbance, we show that our method surpasses a standard Learning-from-Scratch (LfS) approach in terms of data efficiency and disturbance adaptation. Our initial feasibility study has demonstrated the potential of outperforming the analytical teacher model as the training data increases.