 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-H-Embodiment: A Large-Scale Dataset for Enabling Foundation Models in Medical Robotics
Apr 22, 2026Autonomous medical robots hold promise to improve patient outcomes, reduce provider workload, democratize access to care, and enable superhuman precision. However, autonomous medical robotics has been limited by a fundamental data problem: existing medical robotic datasets are small, single-embodiment, and rarely shared openly, restricting the development of foundation models that the field needs to advance. We introduce Open-H-Embodiment, the largest open dataset of medical robotic video with synchronized kinematics to date, spanning more than 49 institutions and multiple robotic platforms including the CMR Versius, Intuitive Surgical's da Vinci, da Vinci Research Kit (dVRK), Rob Surgical BiTrack, Virtual Incision's MIRA, Moon Surgical Maestro, and a variety of custom systems, spanning surgical manipulation, robotic ultrasound, and endoscopy procedures. We demonstrate the research enabled by this dataset through two foundation models. GR00T-H is the first open foundation vision-language-action model for medical robotics, which is the only evaluated model to achieve full end-to-end task completion on a structured suturing benchmark (25% of trials vs. 0% for all others) and achieves 64% average success across a 29-step ex vivo suturing sequence. We also train Cosmos-H-Surgical-Simulator, the first action-conditioned world model to enable multi-embodiment surgical simulation from a single checkpoint, spanning nine robotic platforms and supporting in silico policy evaluation and synthetic data generation for the medical domain. These results suggest that open, large-scale medical robot data collection can serve as critical infrastructure for the research community, enabling advances in robot learning, world modeling, and beyond.
Hierarchical Deformation Planning and Neural Tracking for DLOs in Constrained Environments
Dec 31, 2025Deformable linear objects (DLOs) manipulation presents significant challenges due to DLOs' inherent high-dimensional state space and complex deformation dynamics. The wide-populated obstacles in realistic workspaces further complicate DLO manipulation, necessitating efficient deformation planning and robust deformation tracking. In this work, we propose a novel framework for DLO manipulation in constrained environments. This framework combines hierarchical deformation planning with neural tracking, ensuring reliable performance in both global deformation synthesis and local deformation tracking. Specifically, the deformation planner begins by generating a spatial path set that inherently satisfies the homotopic constraints associated with DLO keypoint paths. Next, a path-set-guided optimization method is applied to synthesize an optimal temporal deformation sequence for the DLO. In manipulation execution, a neural model predictive control approach, leveraging a data-driven deformation model, is designed to accurately track the planned DLO deformation sequence. The effectiveness of the proposed framework is validated in extensive constrained DLO manipulation tasks.
Manipulating Elasto-Plastic Objects With 3D Occupancy and Learning-Based Predictive Control
May 22, 2025Manipulating elasto-plastic objects remains a significant challenge due to severe self-occlusion, difficulties of representation, and complicated dynamics. This work proposes a novel framework for elasto-plastic object manipulation with a quasi-static assumption for motions, leveraging 3D occupancy to represent such objects, a learned dynamics model trained with 3D occupancy, and a learning-based predictive control algorithm to address these challenges effectively. We build a novel data collection platform to collect full spatial information and propose a pipeline for generating a 3D occupancy dataset. To infer the 3D occupancy during manipulation, an occupancy prediction network is trained with multiple RGB images supervised by the generated dataset. We design a deep neural network empowered by a 3D convolution neural network (CNN) and a graph neural network (GNN) to predict the complex deformation with the inferred 3D occupancy results. A learning-based predictive control algorithm is introduced to plan the robot actions, incorporating a novel shape-based action initialization module specifically designed to improve the planner efficiency. The proposed framework in this paper can successfully shape the elasto-plastic objects into a given goal shape and has been verified in various experiments both in simulation and the real world.
Learning to Hop for a Single-Legged Robot with Parallel Mechanism
Jan 21, 2025This work presents the application of reinforcement learning to improve the performance of a highly dynamic hopping system with a parallel mechanism. Unlike serial mechanisms, parallel mechanisms can not be accurately simulated due to the complexity of their kinematic constraints and closed-loop structures. Besides, learning to hop suffers from prolonged aerial phase and the sparse nature of the rewards. To address them, we propose a learning framework to encode long-history feedback to account for the under-actuation brought by the prolonged aerial phase. In the proposed framework, we also introduce a simplified serial configuration for the parallel design to avoid directly simulating parallel structure during the training. A torque-level conversion is designed to deal with the parallel-serial conversion to handle the sim-to-real issue. Simulation and hardware experiments have been conducted to validate this framework.
DOFS: A Real-world 3D Deformable Object Dataset with Full Spatial Information for Dynamics Model Learning
Oct 29, 2024



This work proposes DOFS, a pilot dataset of 3D deformable objects (DOs) (e.g., elasto-plastic objects) with full spatial information (i.e., top, side, and bottom information) using a novel and low-cost data collection platform with a transparent operating plane. The dataset consists of active manipulation action, multi-view RGB-D images, well-registered point clouds, 3D deformed mesh, and 3D occupancy with semantics, using a pinching strategy with a two-parallel-finger gripper. In addition, we trained a neural network with the down-sampled 3D occupancy and action as input to model the dynamics of an elasto-plastic object. Our dataset and all CADs of the data collection system will be released soon on our website.
Homotopic Path Set Planning for Robot Manipulation and Navigation
Jun 05, 2024



This paper addresses path set planning that yields important applications in robot manipulation and navigation such as path generation for deformable object keypoints and swarms. A path set refers to the collection of finite agent paths to represent the overall spatial path of a group of keypoints or a swarm, whose collective properties meet spatial and topological constraints. As opposed to planning a single path, simultaneously planning multiple paths with constraints poses nontrivial challenges in complex environments. This paper presents a systematic planning pipeline for homotopic path sets, a widely applicable path set class in robotics. An extended visibility check condition is first proposed to attain a sparse passage distribution amidst dense obstacles. Passage-aware optimal path planning compatible with sampling-based planners is then designed for single path planning with adjustable costs. Large accessible free space for path set accommodation can be achieved by the planned path while having a sufficiently short path length. After specifying the homotopic properties of path sets, path set generation based on deformable path transfer is proposed in an efficient centralized manner. The effectiveness of these methods is validated by extensive simulated and experimental results.
Bootstrapping Robotic Skill Learning With Intuitive Teleoperation: Initial Feasibility Study
Nov 11, 2023



Robotic skill learning has been increasingly studied but the demonstration collections are more challenging compared to collecting images/videos in computer vision and texts in natural language processing. This paper presents a skill learning paradigm by using intuitive teleoperation devices to generate high-quality human demonstrations efficiently for robotic skill learning in a data-driven manner. By using a reliable teleoperation interface, the da Vinci Research Kit (dVRK) master, a system called dVRK-Simulator-for-Demonstration (dS4D) is proposed in this paper. Various manipulation tasks show the system's effectiveness and advantages in efficiency compared to other interfaces. Using the collected data for policy learning has been investigated, which verifies the initial feasibility. We believe the proposed paradigm can facilitate robot learning driven by high-quality demonstrations and efficiency while generating them.
Towards Safe Landing of Falling Quadruped Robots Using a 3-DoF Morphable Inertial Tail
Sep 30, 2022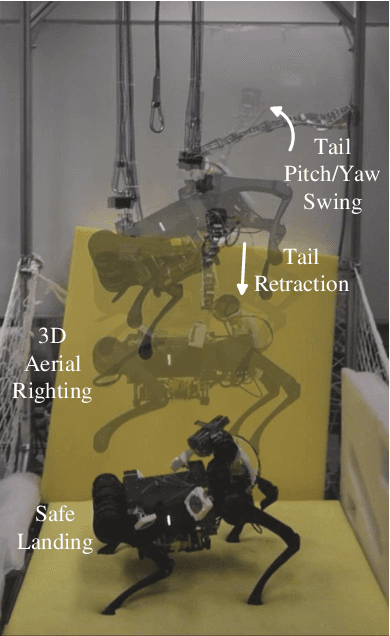
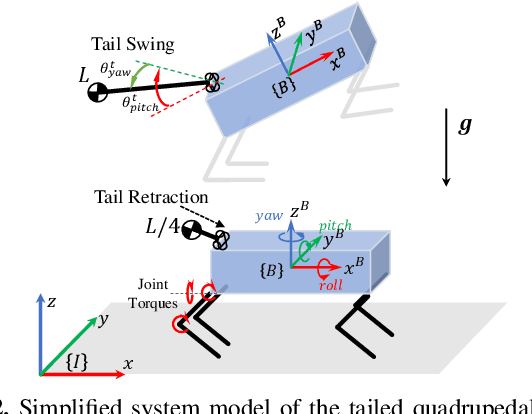

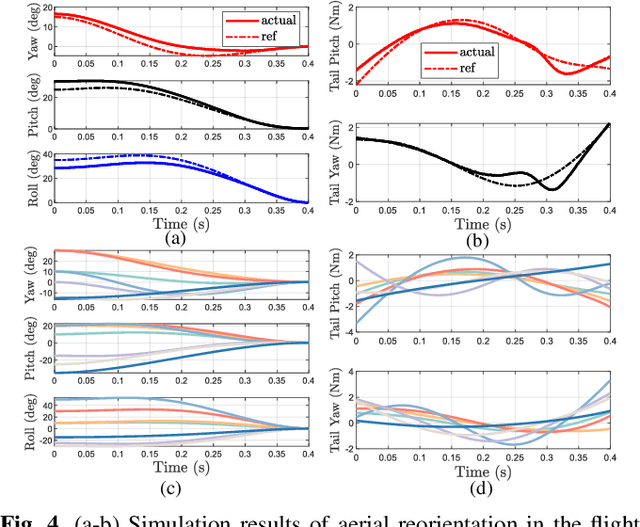
Falling cat problem is well-known where cats show their super aerial reorientation capability and can land safely. For their robotic counterparts, a similar falling quadruped robot problem, has not been fully addressed, although achieving safe landing as the cats has been increasingly investigated. Unlike imposing the burden on landing control, we approach to safe landing of falling quadruped robots by effective flight phase control. Different from existing work like swinging legs and attaching reaction wheels or simple tails, we propose to deploy a 3-DoF morphable inertial tail on a medium-size quadruped robot. In the flight phase, the tail with its maximum length can self-right the body orientation in 3D effectively; before touch-down, the tail length can be retracted to about 1/4 of its maximum for impressing the tail's side-effect on landing. To enable aerial reorientation for safe landing in the quadruped robots, we design a control architecture, which has been verified in a high-fidelity physics simulation environment with different initial conditions. Experimental results on a customized flight-phase test platform with comparable inertial properties are provided and show the tail's effectiveness on 3D body reorientation and its fast retractability before touch-down. An initial falling quadruped robot experiment is shown, where the robot Unitree A1 with the 3-DoF tail can land safely subject to non-negligible initial body angles.
HM-DDP: A Hybrid Multiple-shooting Differential Dynamic Programming Method for Constrained Trajectory Optimization
Sep 15, 2021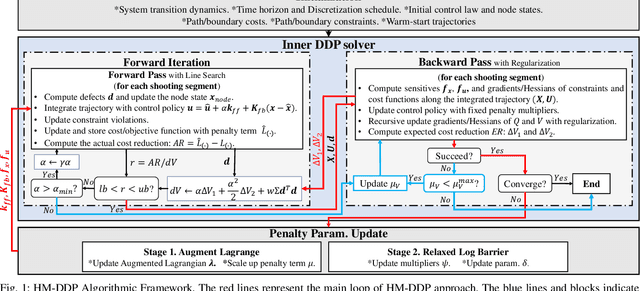
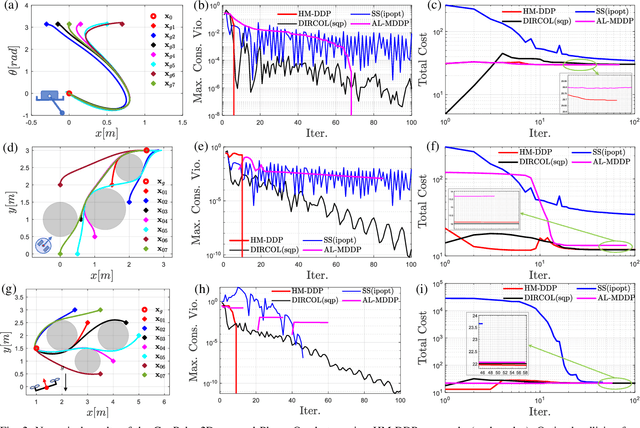
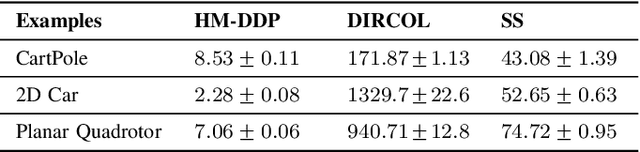
Trajectory optimization has been used extensively in robotic systems. In particular, Differential Dynamic Programming (DDP) has performed well as an off-line planner or an online nonlinear model predictive control solver, with a lower computational cost compared with other general-purpose nonlinear programming solvers. However, standard DDP cannot handle any constraints or perform reasonable initialization of a state trajectory. In this paper, we propose a hybrid constrained DDP variant with a multiple-shooting framework. The main technical contributions are twofold: 1) In addition to inheriting the simplicity of the initialization in multiple shooting, a two-stage framework is developed to deal with state and control inequality constraints robustly without loss of the linear feedback term of DDP. Such a hybrid strategy offers a fast convergence of constraint satisfaction. 2) An improved globalization strategy is proposed to exploit the coupled effects between line-searching and regularization, which is able to enhance the numerical robustness of DDP-like approaches. Our approach is tested on three constrained trajectory optimization problems with nonlinear inequality constraints and outperforms the commonly-used collocation and shooting methods in terms of runtime and constraint satisfaction.