 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBeyond Encoder Accumulation: Measuring Encoder Roles in Multi-Encoder VLMs
Jun 02, 2026As foundation models scale toward fusing more heterogeneous visual streams, understanding how diverse encoders interact under joint training becomes a prerequisite for principled design. Yet large vision-language models (LVLMs) currently lack the tools to do so, and parameter-efficient encoder configurations remain hard to identify before training. To re-examine encoder roles under joint training, on the 16-benchmark Cambrian-1 suite we retrain and evaluate all 31 non-empty subsets of five common vision encoders under a unified pipeline (~20k GPU-hours total), and report three findings. First, retraining each subset from scratch reveals encoder rankings that differ from those obtained by masking encoders on a fixed checkpoint, including which encoder ranks first overall. Second, we decompose each encoder's contribution into two axes, Capacity, the score an encoder reaches on its own, and Necessity, the drop when it is removed from the full pool. The two axes are not interchangeable. Pairing the two highest-Capacity encoders is suboptimal, while pairing a high-Capacity anchor with an adaptive complement matches the full five-encoder model. Adding further encoders beyond this pair yields only marginal gains. Third, at fixed parameter count, per-encoder pre-projector effective rank explains the residual score variation. The strongest pairs combine an anchor whose rank survives joint training with a complement whose rank expands under it, suggesting that higher-rank, less-collapsed projector inputs correspond to a more favorable optimization regime at the encoder-projector interface. Together, the Capacity-Necessity decomposition and the pre-projector rank analysis, along with comprehensive evaluation through retraining, expose a methodological gap in multi-encoder LVLM design, and offer concrete primitives for closing it.
PACT: Proactive Asking for Continual Task Assistance in Human-Robot Collaboration
May 23, 2026Robotic assistants in long-term human-robot collaboration need to assist users under partial observations while leveraging cross-day interaction history. However, human traits and routines are often unknown at the beginning of collaboration, making passive infer-then-act assistance ineffective and inefficient. To address this challenge, we study a cross-day proactive asking setting for continual task assistance and propose PACT (Proactive Asking for Continual Task Assistance), an ask-or-act framework that determines whether clarification should be sought before taking action. PACT leverages current observations together with accumulated interaction history to evaluate contextual sufficiency, enabling the robot to provide more reliable assistance and progressively adapt to the user over time. We implement its primary learned instantiation using reinforcement learning and evaluate alternative instantiations under the same framework. To assess such behavior, we further introduce a clarification utility metric that quantifies the trade-off between assistance accuracy and the frequency of clarification requests. Experiments in multi-day embodied collaboration scenarios demonstrate that, compared with passive inference baselines, PACT consistently improves both assistance accuracy and clarification utility, highlighting the importance of proactive asking in continual human-robot collaboration.
MHSA: A Lightweight Framework for Mitigating Hallucinations via Steered Attention in LVLMs
May 14, 2026Large vision-language models (LVLMs) have achieved remarkable performance across diverse multimodal tasks, yet they continue to suffer from hallucinations, generating content that is inconsistent with the visual input. Prior work DHCP (Detecting Hallucinations by Cross-modal Attention Pattern) has explored hallucination detection from the perspective of cross-modal attention, but does not address hallucination mitigation. In this paper, we propose MHSA (Mitigating Hallucinations via Steered Attention), a lightweight framework that mitigates hallucinations by learning to correct cross-modal attention patterns in LVLMs. MHSA trains a simple three-layer MLP generator to produce corrected attention, guided by supervisory signals from the DHCP discriminator and the LVLM itself. During inference, MHSA mitigates both discriminative and generative hallucinations across various datasets and LVLMs by simply replacing the original cross-modal attention with the corrected one, without modifying any LVLM parameters. By extending cross-modal attention mechanisms from hallucination detection to hallucination mitigation, MHSA offers a novel perspective on hallucination research in LVLMs and helps enhance their reliability.
Unposed-to-3D: Learning Simulation-Ready Vehicles from Real-World Images
Apr 21, 2026Creating realistic and simulation-ready 3D assets is crucial for autonomous driving research and virtual environment construction. However, existing 3D vehicle generation methods are often trained on synthetic data with significant domain gaps from real-world distributions. The generated models often exhibit arbitrary poses and undefined scales, resulting in poor visual consistency when integrated into driving scenes. In this paper, we present Unposed-to-3D, a novel framework that learns to reconstruct 3D vehicles from real-world driving images using image-only supervision. Our approach consists of two stages. In the first stage, we train an image-to-3D reconstruction network using posed images with known camera parameters. In the second stage, we remove camera supervision and use a camera prediction head that directly estimates the camera parameters from unposed images. The predicted pose is then used for differentiable rendering to provide self-supervised photometric feedback, enabling the model to learn 3D geometry purely from unposed images. To ensure simulation readiness, we further introduce a scale-aware module to predict real-world size information, and a harmonization module that adapts the generated vehicles to the target driving scene with consistent lighting and appearance. Extensive experiments demonstrate that Unposed-to-3D effectively reconstructs realistic, pose-consistent, and harmonized 3D vehicle models from real-world images, providing a scalable path toward creating high-quality assets for driving scene simulation and digital twin environments.
Knowledge-Guided Adversarial Training for Infrared Object Detection via Thermal Radiation Modeling
Mar 26, 2026In complex environments, infrared object detection exhibits broad applicability and stability across diverse scenarios. However, infrared object detection is vulnerable to both common corruptions and adversarial examples, leading to potential security risks. To improve the robustness of infrared object detection, current methods mostly adopt a data-driven ideology, which only superficially drives the network to fit the training data without specifically considering the unique characteristics of infrared images, resulting in limited robustness. In this paper, we revisit infrared physical knowledge and find that relative thermal radiation relations between different classes can be regarded as a reliable knowledge source under the complex scenarios of adversarial examples and common corruptions. Thus, we theoretically model thermal radiation relations based on the rank order of gray values for different classes, and further quantify the stability of various inter-class thermal radiation relations. Based on the above theoretical framework, we propose Knowledge-Guided Adversarial Training (KGAT) for infrared object detection, in which infrared physical knowledge is embedded into the adversarial training process, and the predicted results are optimized to be consistent with the actual physical laws. Extensive experiments on three infrared datasets and six mainstream infrared object detection models demonstrate that KGAT effectively enhances both clean accuracy and robustness against adversarial attacks and common corruptions.
Video-Only ToM: Enhancing Theory of Mind in Multimodal Large Language Models
Mar 25, 2026As large language models (LLMs) continue to advance, there is increasing interest in their ability to infer human mental states and demonstrate a human-like Theory of Mind (ToM). Most existing ToM evaluations, however, are centered on text-based inputs, while scenarios relying solely on visual information receive far less attention. This leaves a gap, since real-world human-AI interaction typically requires multimodal understanding. In addition, many current methods regard the model as a black box and rarely probe how its internal attention behaves in multiple-choice question answering (QA). The impact of LLM hallucinations on such tasks is also underexplored from an interpretability perspective. To address these issues, we introduce VisionToM, a vision-oriented intervention framework designed to strengthen task-aware reasoning. The core idea is to compute intervention vectors that align visual representations with the correct semantic targets, thereby steering the model's attention through different layers of visual features. This guidance reduces the model's reliance on spurious linguistic priors, leading to more reliable multimodal language model (MLLM) outputs and better QA performance. Experiments on the EgoToM benchmark-an egocentric, real-world video dataset for ToM with three multiple-choice QA settings-demonstrate that our method substantially improves the ToM abilities of MLLMs. Furthermore, results on an additional open-ended generation task show that VisionToM enables MLLMs to produce free-form explanations that more accurately capture agents' mental states, pushing machine-human collaboration toward greater alignment.
Step-DeepResearch Technical Report
Dec 24, 2025As LLMs shift toward autonomous agents, Deep Research has emerged as a pivotal metric. However, existing academic benchmarks like BrowseComp often fail to meet real-world demands for open-ended research, which requires robust skills in intent recognition, long-horizon decision-making, and cross-source verification. To address this, we introduce Step-DeepResearch, a cost-effective, end-to-end agent. We propose a Data Synthesis Strategy Based on Atomic Capabilities to reinforce planning and report writing, combined with a progressive training path from agentic mid-training to SFT and RL. Enhanced by a Checklist-style Judger, this approach significantly improves robustness. Furthermore, to bridge the evaluation gap in the Chinese domain, we establish ADR-Bench for realistic deep research scenarios. Experimental results show that Step-DeepResearch (32B) scores 61.4% on Scale AI Research Rubrics. On ADR-Bench, it significantly outperforms comparable models and rivals SOTA closed-source models like OpenAI and Gemini DeepResearch. These findings prove that refined training enables medium-sized models to achieve expert-level capabilities at industry-leading cost-efficiency.
XYZCylinder: Feedforward Reconstruction for Driving Scenes Based on A Unified Cylinder Lifting Method
Oct 09, 2025Recently, more attention has been paid to feedforward reconstruction paradigms, which mainly learn a fixed view transformation implicitly and reconstruct the scene with a single representation. However, their generalization capability and reconstruction accuracy are still limited while reconstructing driving scenes, which results from two aspects: (1) The fixed view transformation fails when the camera configuration changes, limiting the generalization capability across different driving scenes equipped with different camera configurations. (2) The small overlapping regions between sparse views of the $360^\circ$ panorama and the complexity of driving scenes increase the learning difficulty, reducing the reconstruction accuracy. To handle these difficulties, we propose \textbf{XYZCylinder}, a feedforward model based on a unified cylinder lifting method which involves camera modeling and feature lifting. Specifically, to improve the generalization capability, we design a Unified Cylinder Camera Modeling (UCCM) strategy, which avoids the learning of viewpoint-dependent spatial correspondence and unifies different camera configurations with adjustable parameters. To improve the reconstruction accuracy, we propose a hybrid representation with several dedicated modules based on newly designed Cylinder Plane Feature Group (CPFG) to lift 2D image features to 3D space. Experimental results show that XYZCylinder achieves state-of-the-art performance under different evaluation settings, and can be generalized to other driving scenes in a zero-shot manner. Project page: \href{https://yuyuyu223.github.io/XYZCYlinder-projectpage/}{here}.
Step-Audio 2 Technical Report
Jul 24, 2025
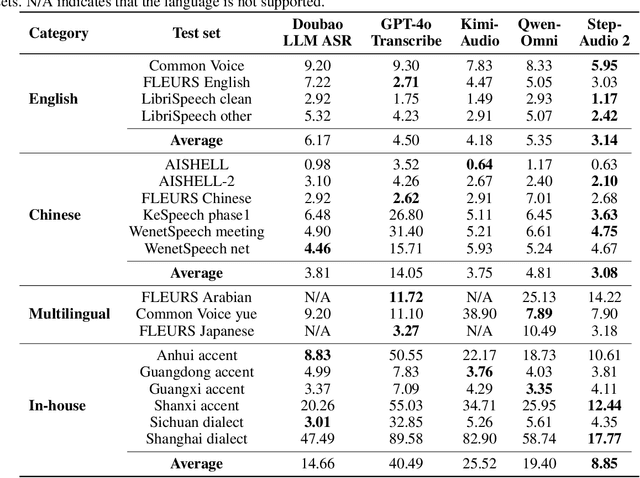

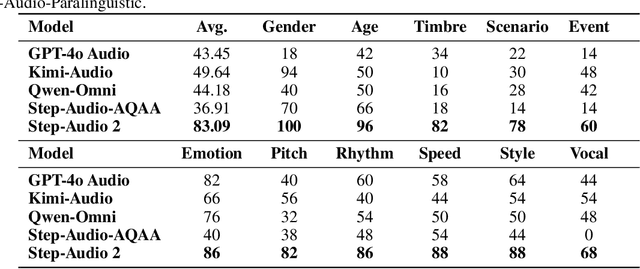
This paper presents Step-Audio 2, an end-to-end multi-modal large language model designed for industry-strength audio understanding and speech conversation. By integrating a latent audio encoder and reasoning-centric reinforcement learning (RL), Step-Audio 2 achieves promising performance in automatic speech recognition (ASR) and audio understanding. To facilitate genuine end-to-end speech conversation, Step-Audio 2 incorporates the generation of discrete audio tokens into language modeling, significantly enhancing its responsiveness to paralinguistic information such as speaking styles and emotions. To effectively leverage the rich textual and acoustic knowledge in real-world data, Step-Audio 2 integrates retrieval-augmented generation (RAG) and is able to call external tools such as web search to mitigate hallucination and audio search to switch timbres. Trained on millions of hours of speech and audio data, Step-Audio 2 delivers intelligence and expressiveness across diverse conversational scenarios. Evaluation results demonstrate that Step-Audio 2 achieves state-of-the-art performance on various audio understanding and conversational benchmarks compared to other open-source and commercial solutions. Please visit https://github.com/stepfun-ai/Step-Audio2 for more information.
From Black Boxes to Transparent Minds: Evaluating and Enhancing the Theory of Mind in Multimodal Large Language Models
Jun 17, 2025As large language models evolve, there is growing anticipation that they will emulate human-like Theory of Mind (ToM) to assist with routine tasks. However, existing methods for evaluating machine ToM focus primarily on unimodal models and largely treat these models as black boxes, lacking an interpretative exploration of their internal mechanisms. In response, this study adopts an approach based on internal mechanisms to provide an interpretability-driven assessment of ToM in multimodal large language models (MLLMs). Specifically, we first construct a multimodal ToM test dataset, GridToM, which incorporates diverse belief testing tasks and perceptual information from multiple perspectives. Next, our analysis shows that attention heads in multimodal large models can distinguish cognitive information across perspectives, providing evidence of ToM capabilities. Furthermore, we present a lightweight, training-free approach that significantly enhances the model's exhibited ToM by adjusting in the direction of the attention head.