 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFrom Poincaré Recurrence to Convergence in Imperfect Information Games: Finding Equilibrium via Regularization
Feb 19, 2020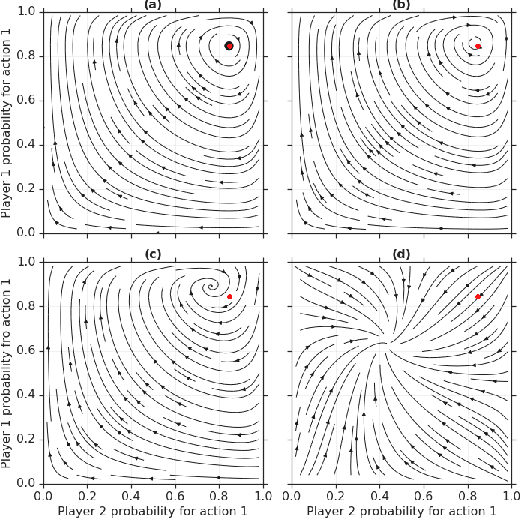
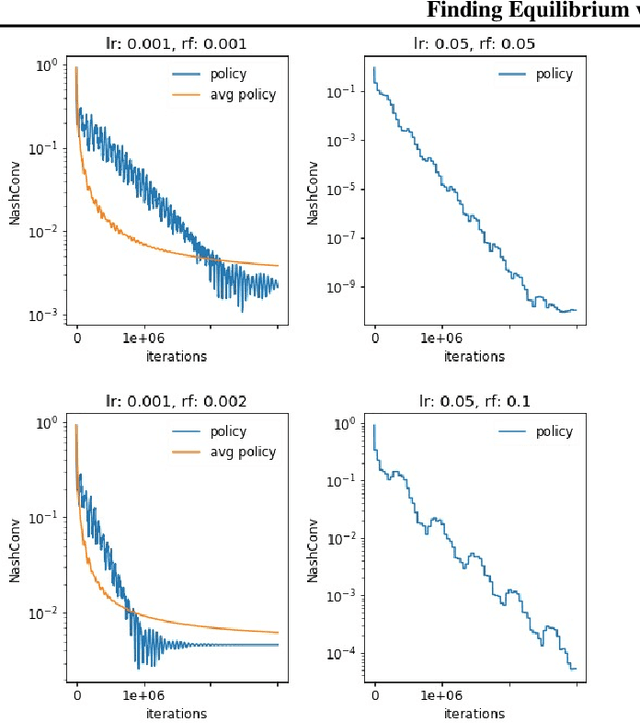
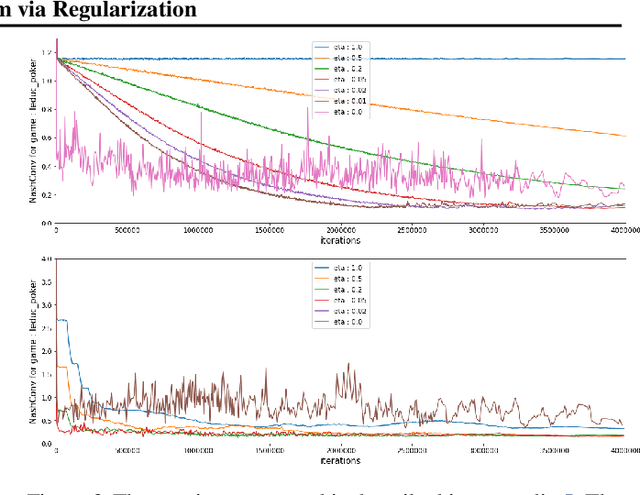
In this paper we investigate the Follow the Regularized Leader dynamics in sequential imperfect information games (IIG). We generalize existing results of Poincar\'e recurrence from normal-form games to zero-sum two-player imperfect information games and other sequential game settings. We then investigate how adapting the reward (by adding a regularization term) of the game can give strong convergence guarantees in monotone games. We continue by showing how this reward adaptation technique can be leveraged to build algorithms that converge exactly to the Nash equilibrium. Finally, we show how these insights can be directly used to build state-of-the-art model-free algorithms for zero-sum two-player Imperfect Information Games (IIG).
OpenSpiel: A Framework for Reinforcement Learning in Games
Oct 10, 2019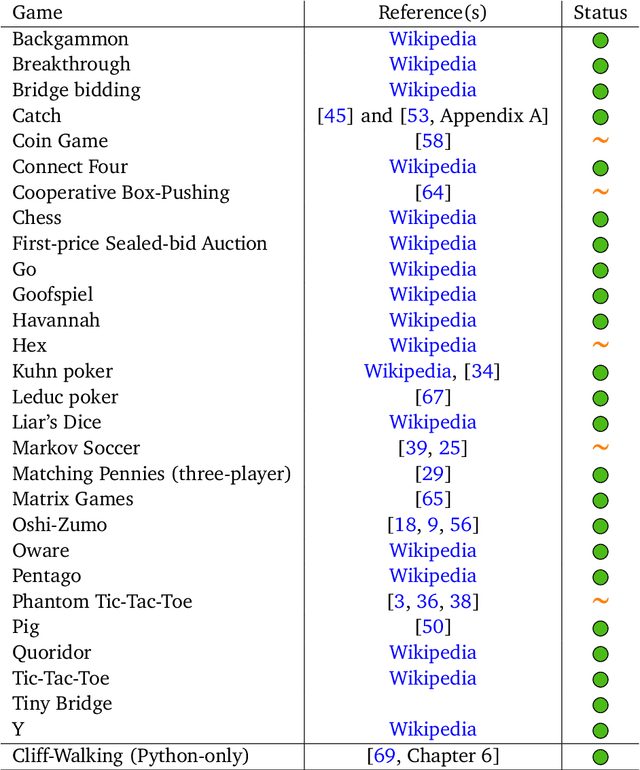
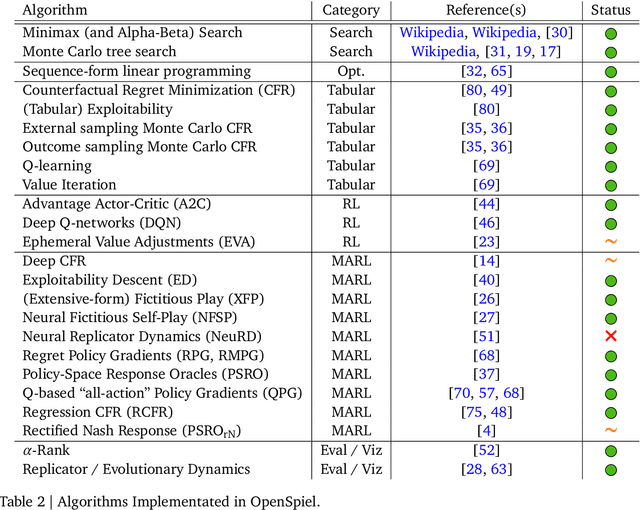
OpenSpiel is a collection of environments and algorithms for research in general reinforcement learning and search/planning in games. OpenSpiel supports n-player (single- and multi- agent) zero-sum, cooperative and general-sum, one-shot and sequential, strictly turn-taking and simultaneous-move, perfect and imperfect information games, as well as traditional multiagent environments such as (partially- and fully- observable) grid worlds and social dilemmas. OpenSpiel also includes tools to analyze learning dynamics and other common evaluation metrics. This document serves both as an overview of the code base and an introduction to the terminology, core concepts, and algorithms across the fields of reinforcement learning, computational game theory, and search.
Neural Replicator Dynamics
Jun 01, 2019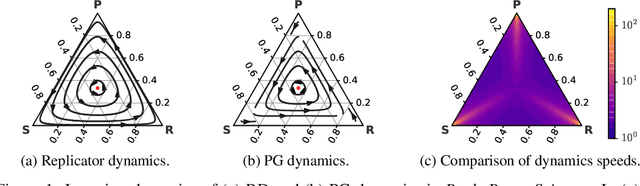
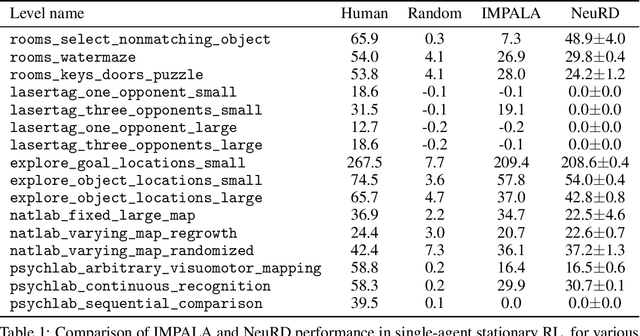
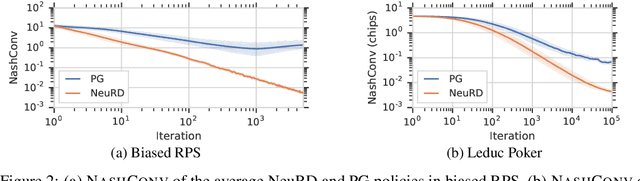
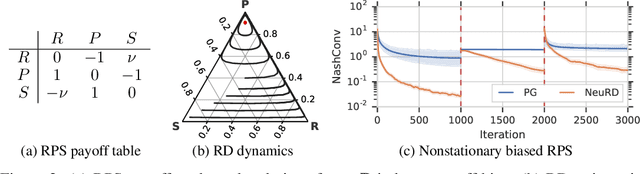
In multiagent learning, agents interact in inherently nonstationary environments due to their concurrent policy updates. It is, therefore, paramount to develop and analyze algorithms that learn effectively despite these nonstationarities. A number of works have successfully conducted this analysis under the lens of evolutionary game theory (EGT), wherein a population of individuals interact and evolve based on biologically-inspired operators. These studies have mainly focused on establishing connections to value-iteration based approaches in stateless or tabular games. We extend this line of inquiry to formally establish links between EGT and policy gradient (PG) methods, which have been extensively applied in single and multiagent learning. We pinpoint weaknesses of the commonly-used softmax PG algorithm in adversarial and nonstationary settings and contrast PG's behavior to that predicted by replicator dynamics (RD), a central model in EGT. We consequently provide theoretical results that establish links between EGT and PG methods, then derive Neural Replicator Dynamics (NeuRD), a parameterized version of RD that constitutes a novel method with several advantages. First, as NeuRD reduces to the well-studied no-regret Hedge algorithm in the tabular setting, it inherits no-regret guarantees that enable convergence to equilibria in games. Second, NeuRD is shown to be more adaptive to nonstationarity, in comparison to PG, when learning in canonical games and imperfect information benchmarks including Poker. Thirdly, modifying any PG-based algorithm to use the NeuRD update rule is straightforward and incurs no added computational costs. Finally, while single-agent learning is not the main focus of the paper, we verify empirically that NeuRD is competitive in these settings with a recent baseline algorithm.
Computing Approximate Equilibria in Sequential Adversarial Games by Exploitability Descent
Mar 21, 2019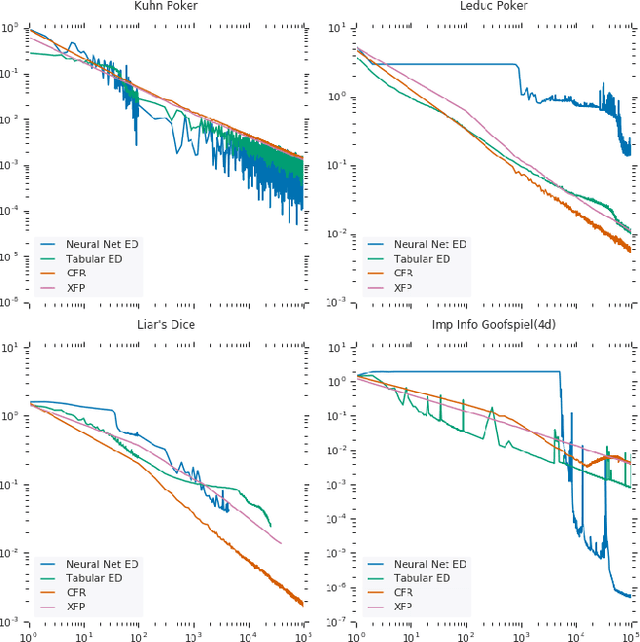
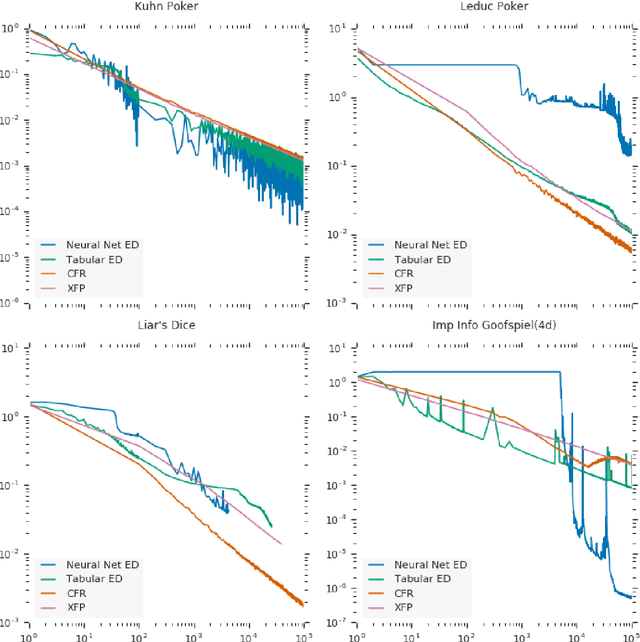
In this paper, we present exploitability descent, a new algorithm to compute approximate equilibria in two-player zero-sum extensive-form games with imperfect information, by direct policy optimization against worst-case opponents. We prove that when following this optimization, the exploitability of a player's strategy converges asymptotically to zero, and hence when both players employ this optimization, the joint policies converge to a Nash equilibrium. Unlike fictitious play (XFP) and counterfactual regret minimization (CFR), our convergence result pertains to the policies being optimized rather than the average policies. Our experiments demonstrate convergence rates comparable to XFP and CFR in four benchmark games in the tabular case. Using function approximation, we find that our algorithm outperforms the tabular version in two of the games, which, to the best of our knowledge, is the first such result in imperfect information games among this class of algorithms.
Woulda, Coulda, Shoulda: Counterfactually-Guided Policy Search
Nov 15, 2018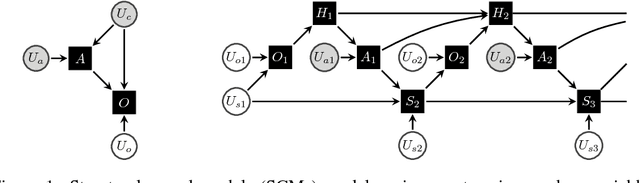
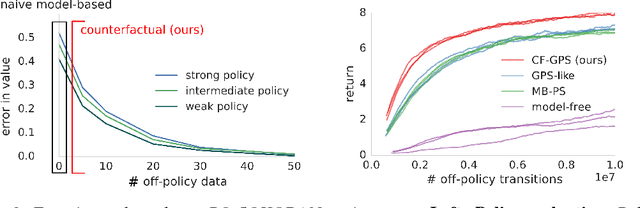
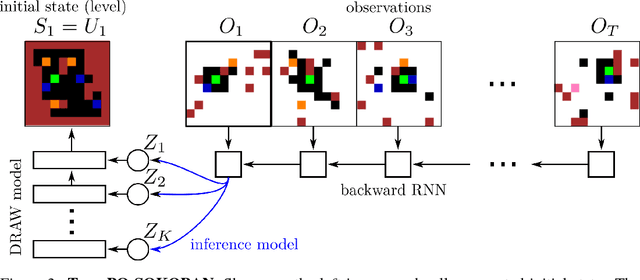
Learning policies on data synthesized by models can in principle quench the thirst of reinforcement learning algorithms for large amounts of real experience, which is often costly to acquire. However, simulating plausible experience de novo is a hard problem for many complex environments, often resulting in biases for model-based policy evaluation and search. Instead of de novo synthesis of data, here we assume logged, real experience and model alternative outcomes of this experience under counterfactual actions, actions that were not actually taken. Based on this, we propose the Counterfactually-Guided Policy Search (CF-GPS) algorithm for learning policies in POMDPs from off-policy experience. It leverages structural causal models for counterfactual evaluation of arbitrary policies on individual off-policy episodes. CF-GPS can improve on vanilla model-based RL algorithms by making use of available logged data to de-bias model predictions. In contrast to off-policy algorithms based on Importance Sampling which re-weight data, CF-GPS leverages a model to explicitly consider alternative outcomes, allowing the algorithm to make better use of experience data. We find empirically that these advantages translate into improved policy evaluation and search results on a non-trivial grid-world task. Finally, we show that CF-GPS generalizes the previously proposed Guided Policy Search and that reparameterization-based algorithms such Stochastic Value Gradient can be interpreted as counterfactual methods.