 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhen and Why is Optimistic Multiplicative Weights Slow? The Geometry of Energy Dissipation
May 13, 2026This paper studies the convergence of the Optimistic Multiplicative Weights Update algorithm (OMWU) in two player zero-sum games. Recent works have identified instances on which the last-iterate of OMWU can converge arbitrarily slowly, but understanding when and why this slow convergence occurs has remained open. In this work, we develop a new analysis framework that gives sharp, quantitative explanations for this behavior. Our analysis is based on viewing the algorithm's dual iterates as an optimistic skew-gradient descent with respect to an energy function. We prove over the dual iterates that energy is dissipative, and by establishing tight bounds on the magnitude of dissipation, our analysis quantifies the geometric bottlenecks that arise when the corresponding primal iterates are close to the simplex boundary. This further translates into a new linear last-iterate convergence rate in KL divergence on games with a unique and interior Nash equilibrium. Compared to prior work, this new rate contains a much sharper dependence on game-specific constants, and we prove this dependence is optimal. Moreover, these geometric insights further translate into new separations on uniform convergence rates for OMWU. On the one hand, we prove constant lower bounds on the uniform best-iterate convergence rate in KL divergence and total variation distance from Nash. On the other hand, we establish for the $2\times 2$ setting a new ${\widetilde O}(T^{-1/2})$ best-iterate rate in duality gap, improving substantially over prior work. Together, this shows in general that uniform convergence rate guarantees do not transfer across different measures of distance to Nash.
Deep Incentive Design with Differentiable Equilibrium Blocks
Mar 12, 2026Automated design of multi-agent interactions with desirable equilibrium outcomes is inherently difficult due to the computational hardness, non-uniqueness, and instability of the resulting equilibria. In this work, we propose the use of game-agnostic differentiable equilibrium blocks (DEBs) as modules in a novel, differentiable framework to address a wide variety of incentive design problems from economics and computer science. We call this framework deep incentive design (DID). To validate our approach, we examine three diverse, challenging incentive design tasks: contract design, machine scheduling, and inverse equilibrium problems. For each task, we train a single neural network using a unified pipeline and DEB. This architecture solves the full distribution of problem instances, parameterized by a context, handling all games across a wide range of scales (from two to sixteen actions per player).
Debate is efficient with your time
Feb 09, 2026AI safety via debate uses two competing models to help a human judge verify complex computational tasks. Previous work has established what problems debate can solve in principle, but has not analysed the practical cost of human oversight: how many queries must the judge make to the debate transcript? We introduce Debate Query Complexity}(DQC), the minimum number of bits a verifier must inspect to correctly decide a debate. Surprisingly, we find that PSPACE/poly (the class of problems which debate can efficiently decide) is precisely the class of functions decidable with O(log n) queries. This characterisation shows that debate is remarkably query-efficient: even for highly complex problems, logarithmic oversight suffices. We also establish that functions depending on all their input bits require Omega(log n) queries, and that any function computable by a circuit of size s satisfies DQC(f) <= log(s) + 3. Interestingly, this last result implies that proving DQC lower bounds of log(n) + 6 for languages in P would yield new circuit lower bounds, connecting debate query complexity to central questions in circuit complexity.
Multi-Agent Online Control with Adversarial Disturbances
Jun 23, 2025Multi-agent control problems involving a large number of agents with competing and time-varying objectives are increasingly prevalent in applications across robotics, economics, and energy systems. In this paper, we study online control in multi-agent linear dynamical systems with disturbances. In contrast to most prior work in multi-agent control, we consider an online setting where disturbances are adversarial and where each agent seeks to minimize its own, adversarial sequence of convex losses. In this setting, we investigate the robustness of gradient-based controllers from single-agent online control, with a particular focus on understanding how individual regret guarantees are influenced by the number of agents in the system. Under minimal communication assumptions, we prove near-optimal sublinear regret bounds that hold uniformly for all agents. Finally, when the objectives of the agents are aligned, we show that the multi-agent control problem induces a time-varying potential game for which we derive equilibrium gap guarantees.
Avoiding Obfuscation with Prover-Estimator Debate
Jun 16, 2025Training powerful AI systems to exhibit desired behaviors hinges on the ability to provide accurate human supervision on increasingly complex tasks. A promising approach to this problem is to amplify human judgement by leveraging the power of two competing AIs in a debate about the correct solution to a given problem. Prior theoretical work has provided a complexity-theoretic formalization of AI debate, and posed the problem of designing protocols for AI debate that guarantee the correctness of human judgements for as complex a class of problems as possible. Recursive debates, in which debaters decompose a complex problem into simpler subproblems, hold promise for growing the class of problems that can be accurately judged in a debate. However, existing protocols for recursive debate run into the obfuscated arguments problem: a dishonest debater can use a computationally efficient strategy that forces an honest opponent to solve a computationally intractable problem to win. We mitigate this problem with a new recursive debate protocol that, under certain stability assumptions, ensures that an honest debater can win with a strategy requiring computational efficiency comparable to their opponent.
Fast and Furious Symmetric Learning in Zero-Sum Games: Gradient Descent as Fictitious Play
Jun 16, 2025This paper investigates the sublinear regret guarantees of two non-no-regret algorithms in zero-sum games: Fictitious Play, and Online Gradient Descent with constant stepsizes. In general adversarial online learning settings, both algorithms may exhibit instability and linear regret due to no regularization (Fictitious Play) or small amounts of regularization (Gradient Descent). However, their ability to obtain tighter regret bounds in two-player zero-sum games is less understood. In this work, we obtain strong new regret guarantees for both algorithms on a class of symmetric zero-sum games that generalize the classic three-strategy Rock-Paper-Scissors to a weighted, n-dimensional regime. Under symmetric initializations of the players' strategies, we prove that Fictitious Play with any tiebreaking rule has $O(\sqrt{T})$ regret, establishing a new class of games for which Karlin's Fictitious Play conjecture holds. Moreover, by leveraging a connection between the geometry of the iterates of Fictitious Play and Gradient Descent in the dual space of payoff vectors, we prove that Gradient Descent, for almost all symmetric initializations, obtains a similar $O(\sqrt{T})$ regret bound when its stepsize is a sufficiently large constant. For Gradient Descent, this establishes the first "fast and furious" behavior (i.e., sublinear regret without time-vanishing stepsizes) for zero-sum games larger than 2x2.
Cautious Optimism: A Meta-Algorithm for Near-Constant Regret in General Games
Jun 05, 2025Recent work [Soleymani et al., 2025] introduced a variant of Optimistic Multiplicative Weights Updates (OMWU) that adaptively controls the learning pace in a dynamic, non-monotone manner, achieving new state-of-the-art regret minimization guarantees in general games. In this work, we demonstrate that no-regret learning acceleration through adaptive pacing of the learners is not an isolated phenomenon. We introduce \emph{Cautious Optimism}, a framework for substantially faster regularized learning in general games. Cautious Optimism takes as input any instance of Follow-the-Regularized-Leader (FTRL) and outputs an accelerated no-regret learning algorithm by pacing the underlying FTRL with minimal computational overhead. Importantly, we retain uncoupledness (learners do not need to know other players' utilities). Cautious Optimistic FTRL achieves near-optimal $O_T(\log T)$ regret in diverse self-play (mixing-and-matching regularizers) while preserving the optimal $O(\sqrt{T})$ regret in adversarial scenarios. In contrast to prior works (e.g. Syrgkanis et al. [2015], Daskalakis et al. [2021]), our analysis does not rely on monotonic step-sizes, showcasing a novel route for fast learning in general games.
Plasticity as the Mirror of Empowerment
May 15, 2025Agents are minimally entities that are influenced by their past observations and act to influence future observations. This latter capacity is captured by empowerment, which has served as a vital framing concept across artificial intelligence and cognitive science. This former capacity, however, is equally foundational: In what ways, and to what extent, can an agent be influenced by what it observes? In this paper, we ground this concept in a universal agent-centric measure that we refer to as plasticity, and reveal a fundamental connection to empowerment. Following a set of desiderata on a suitable definition, we define plasticity using a new information-theoretic quantity we call the generalized directed information. We show that this new quantity strictly generalizes the directed information introduced by Massey (1990) while preserving all of its desirable properties. Our first finding is that plasticity is the mirror of empowerment: The agent's plasticity is identical to the empowerment of the environment, and vice versa. Our second finding establishes a tension between the plasticity and empowerment of an agent, suggesting that agent design needs to be mindful of both characteristics. We explore the implications of these findings, and suggest that plasticity, empowerment, and their relationship are essential to understanding agency.
Faster Rates for No-Regret Learning in General Games via Cautious Optimism
Mar 31, 2025
We establish the first uncoupled learning algorithm that attains $O(n \log^2 d \log T)$ per-player regret in multi-player general-sum games, where $n$ is the number of players, $d$ is the number of actions available to each player, and $T$ is the number of repetitions of the game. Our results exponentially improve the dependence on $d$ compared to the $O(n\, d \log T)$ regret attainable by Log-Regularized Lifted Optimistic FTRL [Far+22c], and also reduce the dependence on the number of iterations $T$ from $\log^4 T$ to $\log T$ compared to Optimistic Hedge, the previously well-studied algorithm with $O(n \log d \log^4 T)$ regret [DFG21]. Our algorithm is obtained by combining the classic Optimistic Multiplicative Weights Update (OMWU) with an adaptive, non-monotonic learning rate that paces the learning process of the players, making them more cautious when their regret becomes too negative.
Re-evaluating Open-ended Evaluation of Large Language Models
Feb 27, 2025
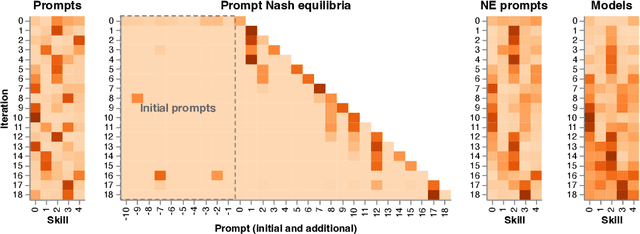

Evaluation has traditionally focused on ranking candidates for a specific skill. Modern generalist models, such as Large Language Models (LLMs), decidedly outpace this paradigm. Open-ended evaluation systems, where candidate models are compared on user-submitted prompts, have emerged as a popular solution. Despite their many advantages, we show that the current Elo-based rating systems can be susceptible to and even reinforce biases in data, intentional or accidental, due to their sensitivity to redundancies. To address this issue, we propose evaluation as a 3-player game, and introduce novel game-theoretic solution concepts to ensure robustness to redundancy. We show that our method leads to intuitive ratings and provide insights into the competitive landscape of LLM development.