 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeML-Guided Primal Heuristics for Mixed Binary Quadratic Programs
Apr 24, 2026Mixed Binary Quadratic Programs (MBQPs) are an important and complex set of problems in combinatorial optimization. As solving large-scale combinatorial optimization problems is challenging, primal heuristics have been developed to quickly identify high-quality solutions within a short amount of time. Recently, a growing body of research has also used machine learning to accelerate solution methods for challenging combinatorial optimization problems. Despite the increasing popularity of these ML-guided methods, a large body of work has focused on Mixed-Integer Linear Programs (MILPs). MBQPs are challenging to solve due to the combinatorial complexity coupled with nonlinearities. This work proposes ML-guided primal heuristics for Mixed Binary Quadratic Programs (MBQPs) by adapting and extending existing work on ML-guided MILP solution prediction to MBQPs. We introduce a new neural network architecture for MBQP solution prediction and a new training data collection procedure. Moreover, we extend existing loss functions in solution prediction and propose to combine contrastive and weighted cross-entropy losses. We evaluate the methods on standard and real-world MBQP benchmarks and show that the developed ML-guided methods significantly outperform existing primal heuristics and state-of-the-art solvers. Furthermore, models trained with our proposed extension with combined losses outperform other ML-based methods adapted from MILPs and improve generalization in cross-regional inference on a real-world wind farm layout optimization problem.
Stability Enhanced Gaussian Process Variational Autoencoders
Apr 10, 2026A novel stability-enhanced Gaussian process variational autoencoder (SEGP-VAE) is proposed for indirectly training a low-dimensional linear time invariant (LTI) system, using high-dimensional video data. The mean and covariance function of the novel SEGP prior are derived from the definition of an LTI system, enabling the SEGP to capture the indirectly observed latent process using a combined probabilistic and interpretable physical model. The search space of LTI parameters is restricted to the set of semi-contracting systems via a complete and unconstrained parametrisation. As a result, the SEGP-VAE can be trained using unconstrained optimisation algorithms. Furthermore, this parametrisation prevents numerical issues caused by the presence of a non-Hurwitz state matrix. A case study applies SEGP-VAE to a dataset containing videos of spiralling particles. This highlights the benefits of the approach and the application-specific design choices that enabled accurate latent state predictions.
$\partial$CBDs: Differentiable Causal Block Diagrams
Feb 07, 2026Modern cyber-physical systems (CPS) integrate physics, computation, and learning, demanding modeling frameworks that are simultaneously composable, learnable, and verifiable. Yet existing approaches treat these goals in isolation: causal block diagrams (CBDs) support modular system interconnections but lack differentiability for learning; differentiable programming (DP) enables end-to-end gradient-based optimization but provides limited correctness guarantees; while contract-based verification frameworks remain largely disconnected from data-driven model refinement. To address these limitations, we introduce differentiable causal block diagrams ($\partial$CBDs), a unifying formalism that integrates these three perspectives. Our approach (i) retains the compositional structure and execution semantics of CBDs, (ii) incorporates assume--guarantee (A--G) contracts for modular correctness reasoning, and (iii) introduces residual-based contracts as differentiable, trajectory-level certificates compatible with automatic differentiation (AD), enabling gradient-based optimization and learning. Together, these elements enable a scalable, verifiable, and trainable modeling pipeline that preserves causality and modularity while supporting data-, physics-, and constraint-informed optimization for CPS.
Zero-Shot Function Encoder-Based Differentiable Predictive Control
Nov 11, 2025We introduce a differentiable framework for zero-shot adaptive control over parametric families of nonlinear dynamical systems. Our approach integrates a function encoder-based neural ODE (FE-NODE) for modeling system dynamics with a differentiable predictive control (DPC) for offline self-supervised learning of explicit control policies. The FE-NODE captures nonlinear behaviors in state transitions and enables zero-shot adaptation to new systems without retraining, while the DPC efficiently learns control policies across system parameterizations, thus eliminating costly online optimization common in classical model predictive control. We demonstrate the efficiency, accuracy, and online adaptability of the proposed method across a range of nonlinear systems with varying parametric scenarios, highlighting its potential as a general-purpose tool for fast zero-shot adaptive control.
Learning to Optimize for Mixed-Integer Non-linear Programming
Oct 14, 2024



Mixed-integer non-linear programs (MINLPs) arise in various domains, such as energy systems and transportation, but are notoriously difficult to solve. Recent advances in machine learning have led to remarkable successes in optimization tasks, an area broadly known as learning to optimize. This approach includes using predictive models to generate solutions for optimization problems with continuous decision variables, thereby avoiding the need for computationally expensive optimization algorithms. However, applying learning to MINLPs remains challenging primarily due to the presence of integer decision variables, which complicate gradient-based learning. To address this limitation, we propose two differentiable correction layers that generate integer outputs while preserving gradient information. Combined with a soft penalty for constraint violation, our framework can tackle both the integrality and non-linear constraints in a MINLP. Experiments on three problem classes with convex/non-convex objective/constraints and integer/mixed-integer variables show that the proposed learning-based approach consistently produces high-quality solutions for parametric MINLPs extremely quickly. As problem size increases, traditional exact solvers and heuristic methods struggle to find feasible solutions, whereas our approach continues to deliver reliable results. Our work extends the scope of learning-to-optimize to MINLP, paving the way for integrating integer constraints into deep learning models. Our code is available at https://github.com/pnnl/L2O-pMINLP.
Differentiable Predictive Control for Large-Scale Urban Road Networks
Jun 14, 2024



Transportation is a major contributor to CO2 emissions, making it essential to optimize traffic networks to reduce energy-related emissions. This paper presents a novel approach to traffic network control using Differentiable Predictive Control (DPC), a physics-informed machine learning methodology. We base our model on the Macroscopic Fundamental Diagram (MFD) and the Networked Macroscopic Fundamental Diagram (NMFD), offering a simplified representation of citywide traffic networks. Our approach ensures compliance with system constraints by construction. In empirical comparisons with existing state-of-the-art Model Predictive Control (MPC) methods, our approach demonstrates a 4 order of magnitude reduction in computation time and an up to 37% improvement in traffic performance. Furthermore, we assess the robustness of our controller to scenario shifts and find that it adapts well to changes in traffic patterns. This work proposes more efficient traffic control methods, particularly in large-scale urban networks, and aims to mitigate emissions and alleviate congestion in the future.
Physics-Informed Machine Learning for Modeling and Control of Dynamical Systems
Jun 24, 2023Physics-informed machine learning (PIML) is a set of methods and tools that systematically integrate machine learning (ML) algorithms with physical constraints and abstract mathematical models developed in scientific and engineering domains. As opposed to purely data-driven methods, PIML models can be trained from additional information obtained by enforcing physical laws such as energy and mass conservation. More broadly, PIML models can include abstract properties and conditions such as stability, convexity, or invariance. The basic premise of PIML is that the integration of ML and physics can yield more effective, physically consistent, and data-efficient models. This paper aims to provide a tutorial-like overview of the recent advances in PIML for dynamical system modeling and control. Specifically, the paper covers an overview of the theory, fundamental concepts and methods, tools, and applications on topics of: 1) physics-informed learning for system identification; 2) physics-informed learning for control; 3) analysis and verification of PIML models; and 4) physics-informed digital twins. The paper is concluded with a perspective on open challenges and future research opportunities.
Proceedings of AAAI 2022 Fall Symposium: The Role of AI in Responding to Climate Challenges
Jan 06, 2023Climate change is one of the most pressing challenges of our time, requiring rapid action across society. As artificial intelligence tools (AI) are rapidly deployed, it is therefore crucial to understand how they will impact climate action. On the one hand, AI can support applications in climate change mitigation (reducing or preventing greenhouse gas emissions), adaptation (preparing for the effects of a changing climate), and climate science. These applications have implications in areas ranging as widely as energy, agriculture, and finance. At the same time, AI is used in many ways that hinder climate action (e.g., by accelerating the use of greenhouse gas-emitting fossil fuels). In addition, AI technologies have a carbon and energy footprint themselves. This symposium brought together participants from across academia, industry, government, and civil society to explore these intersections of AI with climate change, as well as how each of these sectors can contribute to solutions.
Domain-aware Control-oriented Neural Models for Autonomous Underwater Vehicles
Aug 15, 2022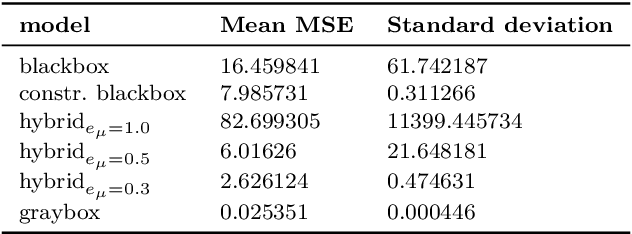
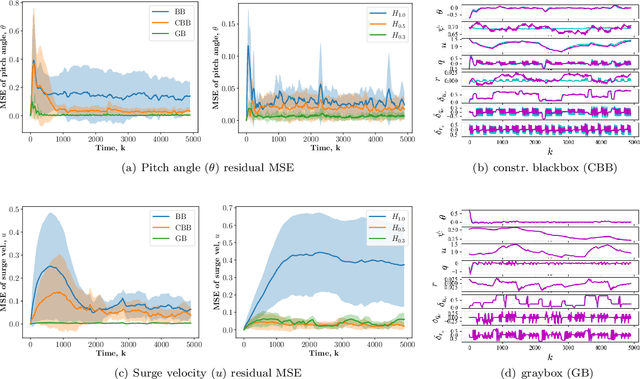
Conventional physics-based modeling is a time-consuming bottleneck in control design for complex nonlinear systems like autonomous underwater vehicles (AUVs). In contrast, purely data-driven models, though convenient and quick to obtain, require a large number of observations and lack operational guarantees for safety-critical systems. Data-driven models leveraging available partially characterized dynamics have potential to provide reliable systems models in a typical data-limited scenario for high value complex systems, thereby avoiding months of expensive expert modeling time. In this work we explore this middle-ground between expert-modeled and pure data-driven modeling. We present control-oriented parametric models with varying levels of domain-awareness that exploit known system structure and prior physics knowledge to create constrained deep neural dynamical system models. We employ universal differential equations to construct data-driven blackbox and graybox representations of the AUV dynamics. In addition, we explore a hybrid formulation that explicitly models the residual error related to imperfect graybox models. We compare the prediction performance of the learned models for different distributions of initial conditions and control inputs to assess their accuracy, generalization, and suitability for control.
Neural Lyapunov Differentiable Predictive Control
May 22, 2022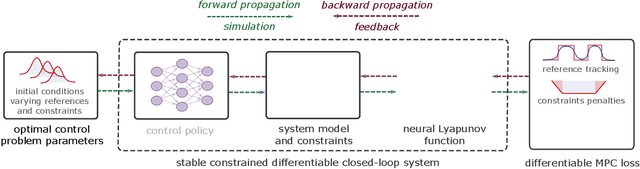
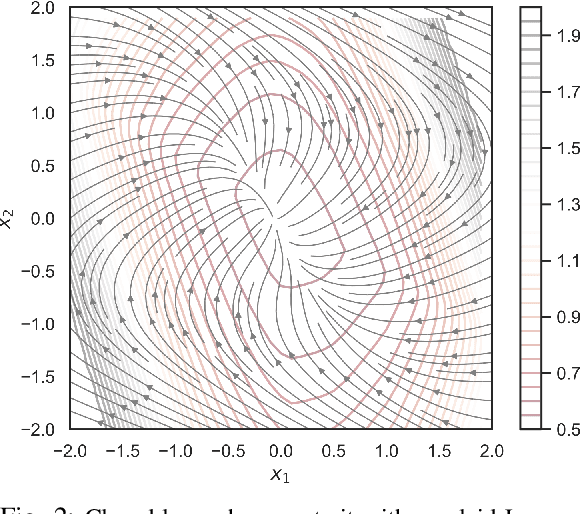
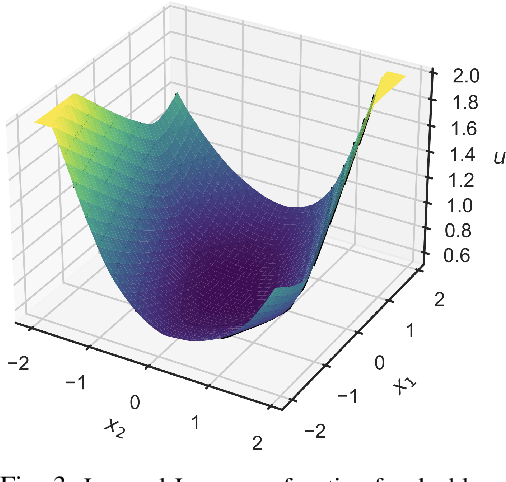
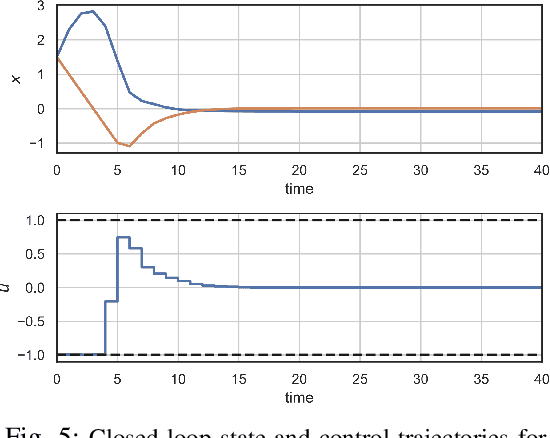
We present a learning-based predictive control methodology using the differentiable programming framework with probabilistic Lyapunov-based stability guarantees. The neural Lyapunov differentiable predictive control (NLDPC) learns the policy by constructing a computational graph encompassing the system dynamics, state and input constraints, and the necessary Lyapunov certification constraints, and thereafter using the automatic differentiation to update the neural policy parameters. In conjunction, our approach jointly learns a Lyapunov function that certifies the regions of state-space with stable dynamics. We also provide a sampling-based statistical guarantee for the training of NLDPC from the distribution of initial conditions. Our offline training approach provides a computationally efficient and scalable alternative to classical explicit model predictive control solutions. We substantiate the advantages of the proposed approach with simulations to stabilize the double integrator model and on an example of controlling an aircraft model.